 LOG-LIO: 一種高效局部幾何信息估計的激光雷達慣性里程計方法
LOG-LIO: 一種高效局部幾何信息估計的激光雷達慣性里程計方法
摘要
局部幾何信息即法線和點分布在基于激光雷達的同時定位與地圖構建(SLAM)中是至關重要,因為它為數據關聯提供了約束,進一步確定了優化方向,最終影響姿態的準確性。然而即使在使用KD樹或體素圖的輔助下,估計法線和點分布也是耗時的任務。為了實現快速法線估計,我們研究了激光雷達掃描幀的結構信息,提出了一種新穎的快速近似最小二乘(FALS)方法,通過預先計算的方位角信息,當新的掃描幀到達時,估計法線僅需要點的距離信息,為了高效估計點的分布,我們將ikd樹擴展到體素管理地圖,并在保持法線一致性的同時增量更新其點云分布。對于滿足基于法線的可見性和一致性檢查的掃描點,我們設計了一種穩健且準確的分層數據關聯方案,其中點到曲面的關聯優先于點到平面的關聯,在分布趨于收斂后,我們進一步固定體素以平衡時間消耗和表示的正確性,在多樣的公開數據集上進行的大量實驗表明,與其他先進方法相比,我們的系統具有明顯優勢。
主要貢獻
地圖體素內逐步更新點云分布以保持空間信息的正確性,同時與法線保持一致性。為了平衡時間消耗和表示的正確性,我們在擴展的ikd樹上管理地圖,并在分布收斂后進一步固定分布。本工作的主要貢獻如下:
Ring FALS一種利用特定激光雷達的結構信息的新型快速近似最小二乘法法線估計器,與PCL相比快速而準確,滿足LIO系統的實時要求。
考慮地圖體素內點分布的魯棒且準確的分層數據關聯方案,其中點到曲面的關聯優先于點到平面的關聯,大尺度優先于小尺度。
對公共數據集進行廣泛實驗,證明我們的LIO系統相對于其他最先進的方法具有優勢。為了使社區受益,該工作實現已在 https://github.com/tiev-tongji/LOG-LIO 開源,還將Ring FALS作為獨立的法線工具開源在 https://github.com/tiev-tongji/RingFalsNormal。
主要內容
LOG-LIO的流程接收來自3D激光雷達和慣性測量單元(IMU)的輸入,如圖2所示。對于新的輸入掃描,我們首先使用Ring FALS來估計原始點的法線,在使用IMU測量校正畸變后,根據它們的局部幾何信息,在未畸變的點云和地圖之間執行關聯。我們通過iEKF整合IMU的測量,并通過類似FAST-LIO的方法優化機體的姿態,在優化之后,新的點被添加到由擴展的ikd樹管理的地圖中,地圖體素內的分布在考慮法線的同時進行增量維護,以確保其準確性,并在收斂后進行固定。
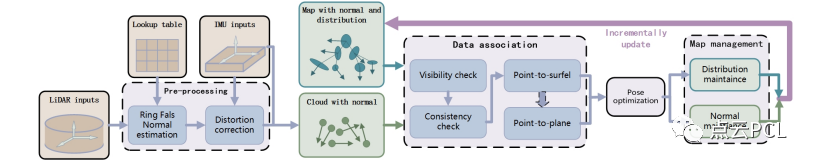
圖2. LOG-LIO系統概述
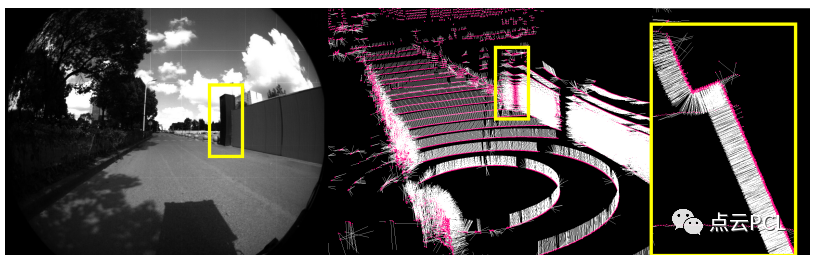
圖3. 白色線條表示來自 Ring FALS 估計的法線
實驗
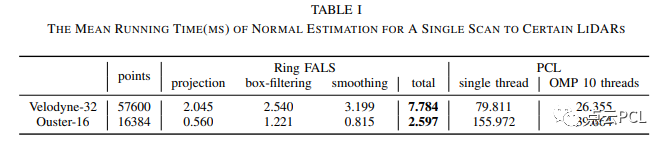
表 I 顯示了用于 M2DGR 和 NTU VIRAL 數據集中 Velodyne-32 LiDAR 的單次掃描的平均法線估計處理時間。對于 Velodyne-32 LiDAR 的單次掃描約有 57,600 個點,與 PCL 相比,Ring FALS 的耗時僅為十分之一,與 OMP 版本相比甚至只有四分之一。對于 Ouster16 LiDAR,無論是單線程還是 OMP 版本,Ring FALS 的時間消耗都遠小于 PCL,分析 PCL 的結果,盡管 Ouster-16 LiDAR 的點數少于 Velodyne-32,但耗時反而增加,原因是 PCL 法線估計中最耗時的部分之一是 KDtree 鄰域搜索,這與 KDtree 的結構有關。
表格 II 報告了實驗結果,可以看出,在室內場景中,LOG、LOG-C 和 FAST-LIO2 的軌跡準確性接近,并在大多數序列中優于 LIO-SAM。
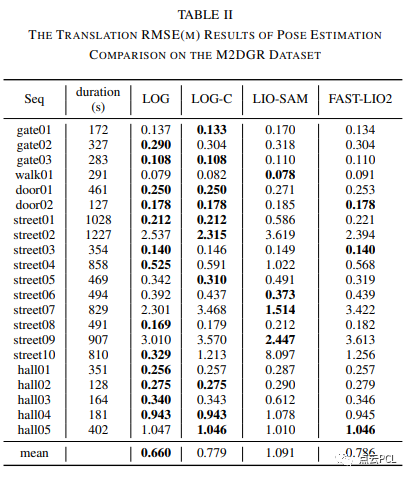
圖4顯示了數據集street10 的軌跡,進行了定性比較,LOG 的出色表現證明與稀疏點場景中的地圖體素關聯更好地表示了局部幾何信息。
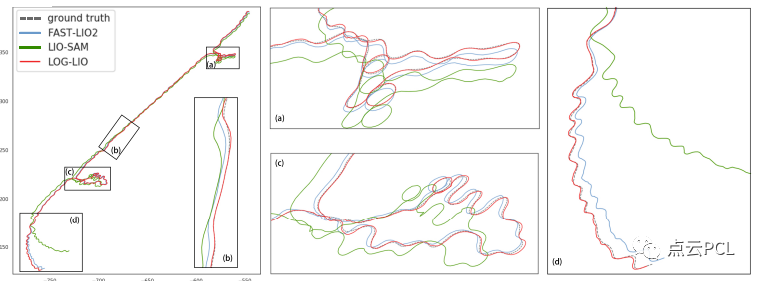
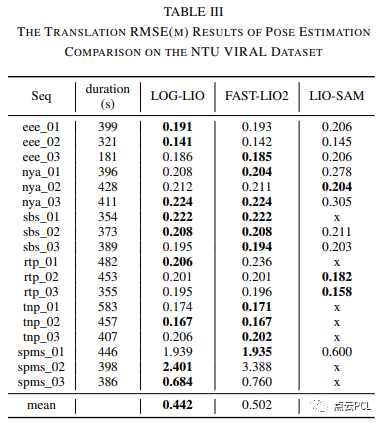
圖4. M2DGR 數據集序列 street10 中的定位估計,放大的彩色框圖像對應于軌跡中相同顏色的框。LOG-LIO 在大多數實驗中獲得最佳結果,緊隨其后的是 FAST-LIO2,而由于 LiDAR 點云和地圖的稀疏性,LIO-SAM 更容易失敗,如表格 III 所示
每個序列中 LOG-LIO 和 FAST-LIO2 的平均耗時,如表 IV 所示。

總結
本文提出的LOG-LIO是一種在線激光雷達慣性里程計法,它結合實時的法線和點分布估計來準確表示局部幾何信息。同時還提出了一種高效的激光雷達點云法線估計方法,名為 Ring FALS,它預先計算了方位信息并僅利用距離信息來估計點的法線,LOG-LIO 通過擴展的 ikd-tree 管理地圖,并在地圖體素內逐步維護法線和點分布,分層數據關聯方案提供了精確的約束,從而實現更準確的姿態估計,在各種環境中,LOG-LIO 在實驗中表現出色,優于現有的 LIO 系統。
-
激光雷達
+關注
關注
968文章
3972瀏覽量
189923 -
數據集
+關注
關注
4文章
1208瀏覽量
24701 -
LIDAR
+關注
關注
10文章
326瀏覽量
29423
原文標題:LOG-LIO: 一種高效局部幾何信息估計的激光雷達慣性里程計方法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達分類以及應用
常見激光雷達種類
如何理解SLAM用到的傳感器輪式里程計IMU、雷達、相機的工作原理與使用場景?精選資料分享
一種不依賴于棋盤格等輔助標定物體實現像素級相機和激光雷達自動標定的方法
計算機視覺方向簡介之視覺慣性里程計

一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架
一種R3LIVE++的LiDAR慣性視覺融合框架
一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架
輪式移動機器人里程計分析
介紹一種基于編碼器合成里程計的方案

基于相機和激光雷達的視覺里程計和建圖系統

LIO-SAM框架是什么





 工商網監
工商網監
評論