") 圖騰柱TCM之兩相變頻錯相的兩種方法
圖騰柱TCM之兩相變頻錯相的兩種方法
這種TCM拓撲的變頻錯相跟LLC的那種開環(huán)變頻錯相是不一樣的,首先環(huán)路只知道要發(fā)出來的Ton是多少,不知道實際周期Ts將會是多少,以及兩個橋臂的相差將會是多少,而且每相的實際Ts都可能不一樣,所以需要實時檢測然后再實時修正的。
目前而言,TCM的錯相方法有兩種:開環(huán)180deg固定錯相,以及閉環(huán)實時調(diào)節(jié)錯相;在我們的代碼中,我們同時采用了這兩種方法。
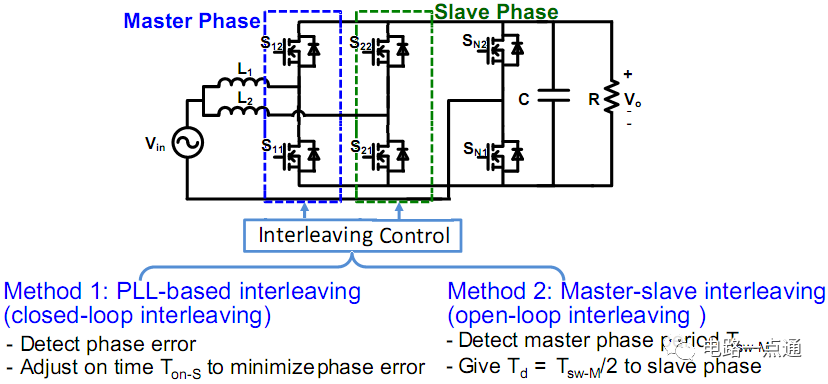
圖12 兩種錯相方法 (1) 開環(huán)錯相 在每次AC過零起步時設(shè)置了預(yù)制錯相,就是第一次發(fā)波就可以實現(xiàn)兩相180deg錯相一步到位,但僅僅是在AC過零后恢復(fù)發(fā)波的第一拍才這樣做,就是借鑒了開環(huán)錯相的原理:讓主相先發(fā)波,然后再強行更改從相的CTR讓從相的PWM延遲主相Ts/2發(fā)波即可;
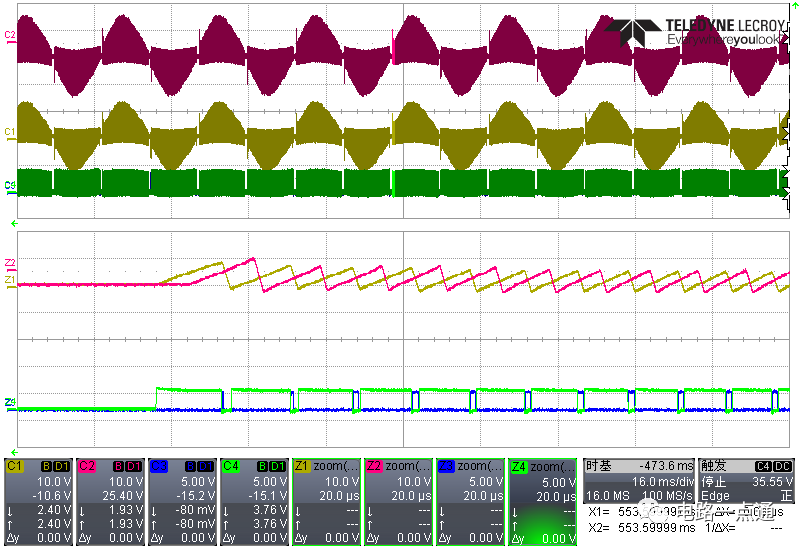
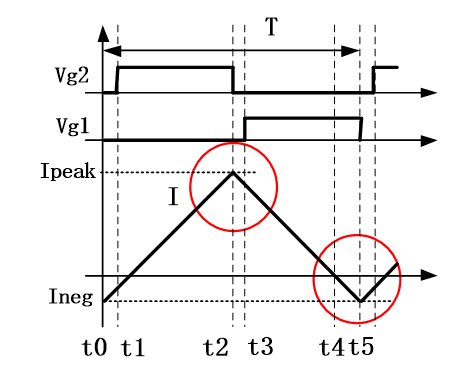
圖13 預(yù)置錯相效果 (2) 閉環(huán)錯相 在正常工作以后,為了提高效率,我們要保證時時刻刻都能實現(xiàn)TCM ZVS控制,所以不適合采用開環(huán)固定錯相的控制方法,最終我們采用了閉環(huán)錯相策略; 主橋臂的Ton不變,然后通過實時調(diào)節(jié)錯相臂的Ton來實現(xiàn)錯相的,計算公式如下,Tshift就是錯相角度;

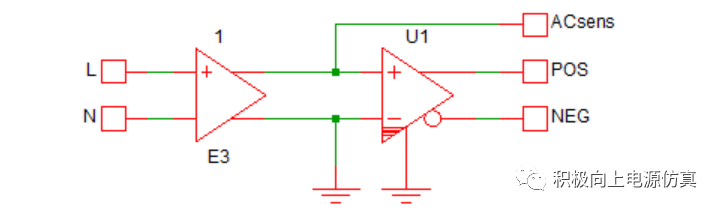
理論上,如果完全錯相好的話Tshift=0,兩個橋臂的PWM相位剛好差別Ts/2的,所以我們錯相環(huán)路的給定就是 ;然后就需要檢測兩個橋臂發(fā)出的PWM的真實相差是多少來作為錯相環(huán)路的反饋,當(dāng)然最直接最準確的方法就是直接用硬件檢測發(fā)出來的兩橋臂的Vgs上升沿或下降沿的時間差別,然后再通過硬件電路回送給DSP來作為錯相環(huán)路的反饋。
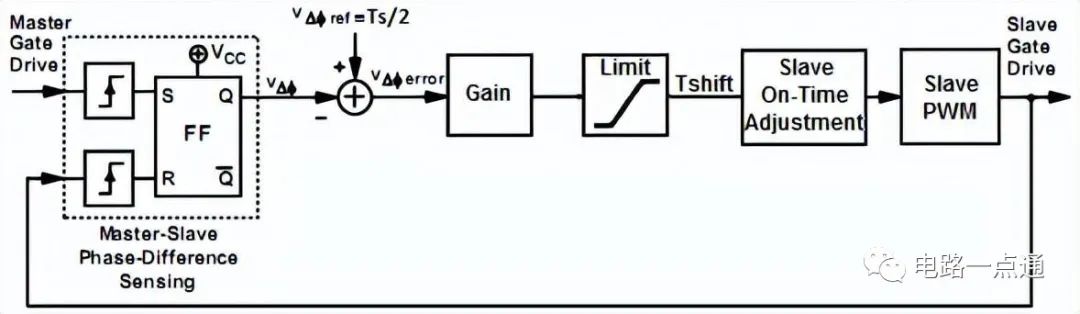
圖14 錯相環(huán)環(huán)路示意圖 但是硬件采集相位差作為反饋(比如采用上圖中示意的RS觸發(fā)器去捕獲兩橋臂驅(qū)動的上升沿)需要增加額外的檢測電路,所以我們采用軟件的方式來作錯相檢測。眾
編輯:黃飛
-
檢測電路
+關(guān)注
關(guān)注
13文章
307瀏覽量
58172 -
RS觸發(fā)器
+關(guān)注
關(guān)注
3文章
101瀏覽量
17941 -
LLC
+關(guān)注
關(guān)注
36文章
567瀏覽量
76786 -
TCM
+關(guān)注
關(guān)注
0文章
32瀏覽量
12799
原文標題:圖騰柱TCM之兩相變頻錯相方法有2種
文章出處:【微信號:電路一點通,微信公眾號:電路一點通】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
互補推挽驅(qū)動、圖騰柱驅(qū)動
提升家里網(wǎng)速的兩種方法
兩相步進電機的雙極連接和單極連接
STM32操作矩陣鍵盤的兩種方法——掃描和中斷

簡述安裝打印機驅(qū)動的兩種方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論