 PID算法在控制系統中的特性和指標
PID算法在控制系統中的特性和指標
PID算法廣泛的被應用在很多的控制系統中,最終的目的都是希望通過pid控制器實現被控量能穩定在預期的目標值。
使用pid控制器作用于系統的時候,正常情況下它應該是不斷的發生作用的,從而讓系統能夠克服外部帶來的干擾最終穩定在期望值。所以對于在一個系統中使用pid進行調節控制的時候,我們是很有必要了解一些有關控制系統的概念和指標的。同時既然選擇了使用pid作用系統的控制器,那么有關pid的特性和指標也是有必要掌握的。
(1)系統的狀態:動態和靜態
一個控制系統的狀態可以分為兩種:靜態和動態。
靜態:如果一個系統通過調節之后,各個環節都暫時不動作了,系統的輸入保持不變,輸出也處于相對靜止的狀態了,那么這種狀態稱為靜態。
打個比方:有一個液位控制系統,當他的進水量和出水量相等時,水位保持不變,這個時候就可以說這個液位系統達到了平衡,處于靜態了。但是呢,靜態不代表著系統里面的水就靜止了,水還是一樣在流動的,只不過從我們液位穩定的角度而言,它已經是達到穩定了。
動態:如果一個系統原本是處于靜態,但是由于系統的輸入發生了變化,系統的平衡狀態被破壞,系統的調節器會發揮作用,調節系統的輸出跟著發生變化,這種由于輸入發生變化,從而調動系統各個環節跟著變化的過程,就稱為系統的動態。
(2)系統的過渡過程
如果一個系統已經達到了平衡狀態了,如果這個時候輸入發生了改變,那么系統會從一個平衡狀態變化到另外一個平衡狀態,這個變化的過程就稱為系統變化的過渡過程。
系統的過渡過程有幾個過程,如下:
1》衰減過程
衰減過程是系統為了應對條件的變化由一開始的波動到最后穩定在某一個數值上,最終達到平衡狀態。這是系統控制中所希望的。
衰減的過程有兩種:
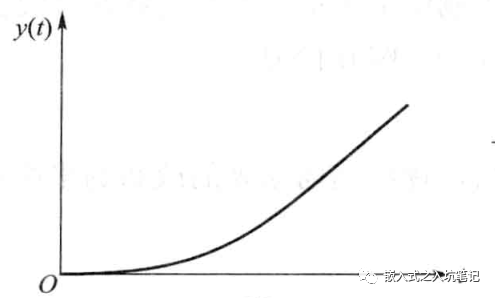
1)非周期衰減:這種衰減變化的過程一般是被控量在設定值的某一側變化,沒有發生來回波動,最后穩定在某一數值。如下圖:
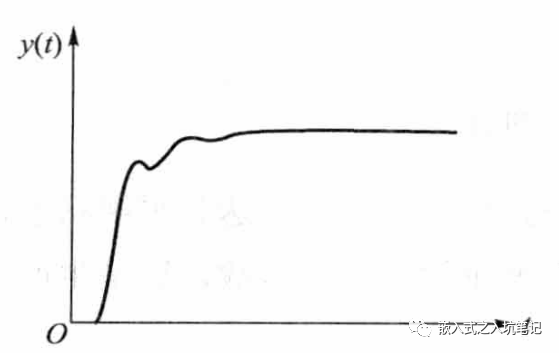
這種變化過程一般都變化緩慢,被控量達到設定值的時間比較長,對于希望快速達到控制目的的控制系統而言,一般不會采用。
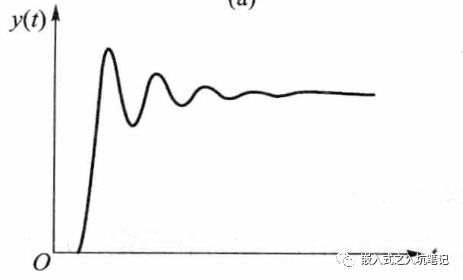
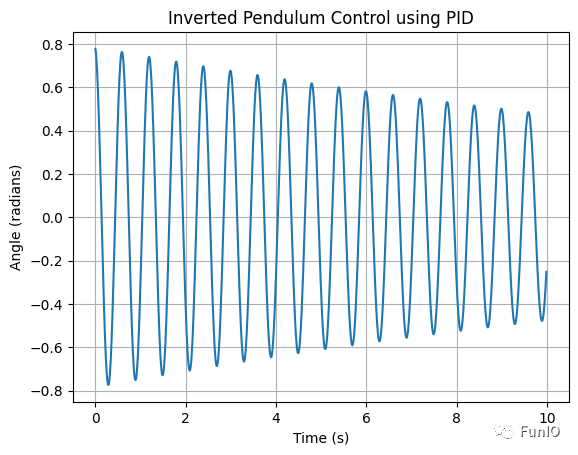
2)振蕩衰減:這種衰減過程是被控量在設定值的附近來回波動,變化的幅度逐漸變小,最后穩定在某一個數值上。如下圖所示:
2》振蕩過程
發生振蕩的系統,它的輸出在設定值的附近來回波動,并且波動的幅度是一樣的、保持不變的。如下:
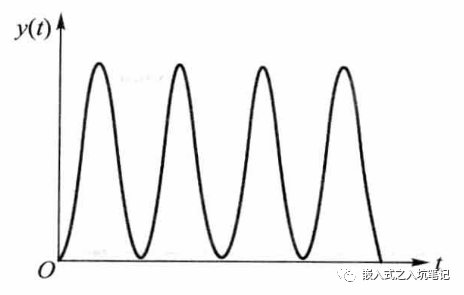
這種振蕩的過程系統是處于穩定與不穩定之間的,一般都認為是不穩定的,不會采用這種控制方式。
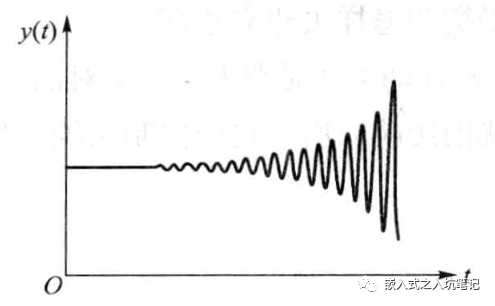
3》發散過程
發散過程是被控量的波動越來越大,最后會越來越偏離設定值。如下:
(3)系統過渡變化過程的質量衡量指標
1》系統的余差
系統的余差指的是當系統經過調節之后,被控量達到的新穩態值與設定值的偏差。偏差越小系統達到穩定時距離設定值的偏差越小,對于控制要求嚴格的系統,余差自然是越小越好。
當然,也不是所有的系統都要求余差非常的小,有些系統的控制要求沒那么高,只要余差在一定的范圍都是可以接受的,這樣就可以區分出有差系統和無差系統。
有差系統:就是達到穩態之后,被控量與設定值之間存在一定的偏差。
無差系統:就是達到穩態之后,被控量與設定值之間沒有偏差的存在。
2》系統的衰減比
對于一個系統而言,如果變化的過程中一開始是在目標值附近振蕩,然后振蕩的幅度逐漸減小,最后穩定在目標值,那這是理想的過渡過程。如下:
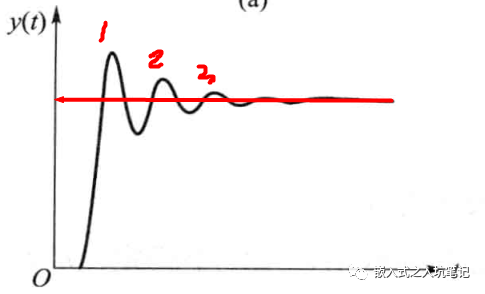
衰減比是指兩個相鄰的同向波峰之比。一般來說,衰減振蕩的過程中,一開始波峰較高,然后不斷的變小,快速達到穩定狀態,這是我們希望看到的。
所以衰減比一般用兩個相鄰的同向波峰的大小進行比較來表示,比值為n。如上圖中的1:2、2:3。
前后的波峰大小的比值n越小,相鄰兩個波峰越接近,過渡過程越接近于等幅振蕩,系統不穩定;n越大,相鄰兩個波峰越遠離,過渡過程越接近于單調過程,過渡時間太長。
一般結論中認為的衰減比比較合適的比例是4:1 ~ 10:1。
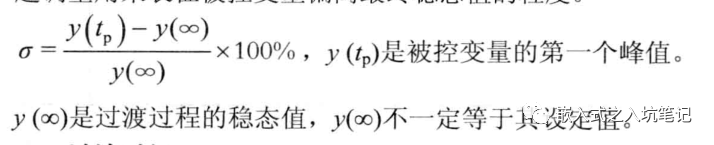
3》超調量
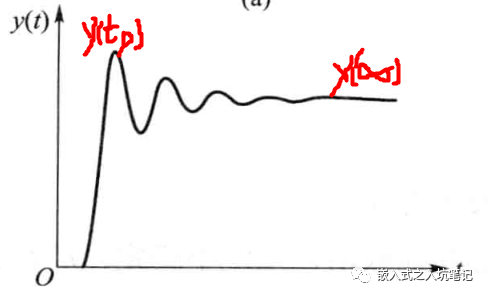
超調量用來表示系統的被控量偏離最終穩態值的程度。計算方法如下:
如下所示:
4》過渡時間 ts
過渡時間ts指的是當一個系統被擾動干擾開始進入到新的穩態之后的±5%或者±2%范圍的這段時間。
過渡時間越短,表示過渡過程進行的越迅速,對抗干擾的能力越強,系統的控制質量很高。相反,如果一個系統的過渡時間很長,可能會出現因為一個干擾引起的過渡過程還沒結束,另外的干擾又進來,導致整個系統疊加多個干擾,導致系統的控制效果變差。
以上簡單的分享了一個控制系統的幾個指標和概念,都是個人學習領悟的,如果有錯誤的地方,還望分享指正,謝謝!
-
控制器
+關注
關注
112文章
16361瀏覽量
178048 -
控制系統
+關注
關注
41文章
6620瀏覽量
110608 -
PID算法
+關注
關注
2文章
172瀏覽量
24311 -
PID
+關注
關注
35文章
1472瀏覽量
85521
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論