") 智能駕駛測(cè)試解決方案
智能駕駛測(cè)試解決方案
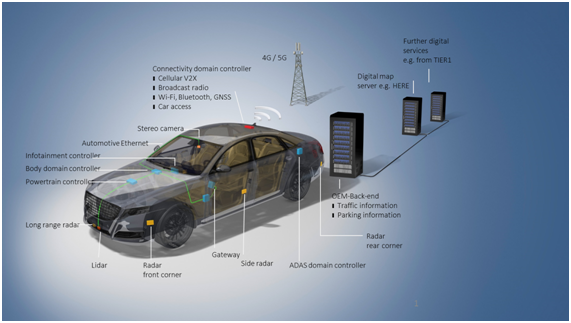
智能網(wǎng)聯(lián)汽車集中運(yùn)用了計(jì)算機(jī)、現(xiàn)代傳感、信息融合、模式識(shí)別、通信網(wǎng)絡(luò)及自動(dòng)控制等技術(shù),是一個(gè)集環(huán)境感知、規(guī)劃決策和多等級(jí)自動(dòng)駕駛控制于一體的技術(shù)綜合體。
為此在智能網(wǎng)聯(lián)汽車研發(fā)過(guò)程中測(cè)試和驗(yàn)證面臨巨大的挑戰(zhàn)。一方面,需要新的測(cè)試方法以改進(jìn)傳統(tǒng)路測(cè)方法,解決傳統(tǒng)測(cè)試中需要大量行駛里程所帶來(lái)的一些問(wèn)題。另一方面,由于發(fā)展初期有限的市場(chǎng)滲透率,測(cè)試驗(yàn)證過(guò)程還需考慮混合交通環(huán)境下其他交通參與者的駕駛行為對(duì)自動(dòng)駕駛汽車功能產(chǎn)生的重大影響。
北匯信息作為Vector、Rohde & Schwarz、IPG、Pi innovo公司、PikeTec、HQRadar公司的技術(shù)合作伙伴,將為中國(guó)汽車客戶提供智能網(wǎng)聯(lián)相關(guān)測(cè)試系統(tǒng)及服務(wù),主要包括L1-L5自動(dòng)駕駛控制系統(tǒng)的快速原型開發(fā)工具、MIL/HIL/VIL測(cè)試系統(tǒng)、車聯(lián)網(wǎng)功能測(cè)試系統(tǒng)、FOTA功能測(cè)試,毫米波雷達(dá)測(cè)試及仿真系統(tǒng)等,全面助力智能網(wǎng)聯(lián)汽車的研發(fā)與生產(chǎn)。
概述
隨著技術(shù)的發(fā)展,汽車量產(chǎn)搭載的自動(dòng)駕駛技術(shù)已經(jīng)由初級(jí)的L1/L2輔助駕駛,向L3甚至更高級(jí)別演進(jìn)。高級(jí)別的自動(dòng)駕駛技術(shù)依賴更多傳感器,那么在環(huán)境感知、多傳感器融合、決策規(guī)劃、車輛控制執(zhí)行、功能安全等方面測(cè)試的挑戰(zhàn)將日益增大。
北匯信息作為國(guó)內(nèi)一流測(cè)試方案服務(wù)商,為各主機(jī)廠、控制系統(tǒng)/傳感器供應(yīng)商在研發(fā)的各階段提供解決方案。
- 智能駕駛車輛架構(gòu)設(shè)計(jì)
北匯信息提供PREEvision架構(gòu)設(shè)計(jì)工具,給用戶一個(gè)完整的協(xié)同開發(fā)平臺(tái),支持從電子電氣架構(gòu)設(shè)計(jì)到產(chǎn)品系列開發(fā)的全過(guò)程。
- 智能駕駛快速原型
北匯信息提供OpenECU快速原型開發(fā)工具。該工具可在Matlab/Simulink環(huán)境進(jìn)行開發(fā),具有高效的自動(dòng)代碼生成功能,可為自動(dòng)駕駛控制原型開發(fā)提供有效支撐。
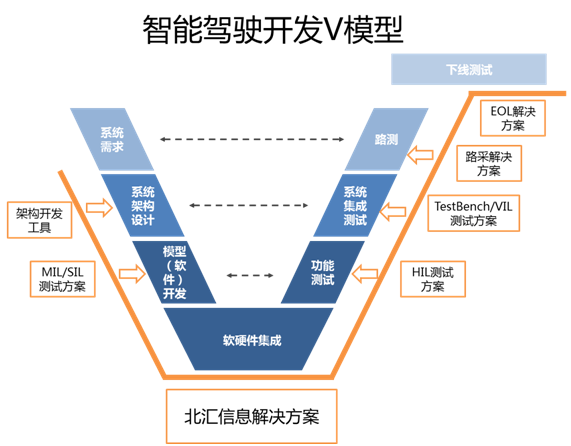
- 智能駕駛仿真測(cè)試:MIL/SIL/HIL/VIL
美國(guó)蘭德公司研究表明,自動(dòng)駕駛需要行駛數(shù)億、甚至數(shù)千億英里驗(yàn)證其可靠性,實(shí)車駕駛需要行駛數(shù)十年、甚至數(shù)百年才能完成可靠性驗(yàn)證。同時(shí)美國(guó)N-FOT項(xiàng)目研究表明“完成一次公共道路測(cè)試的成本至少在100萬(wàn)美元以上”。
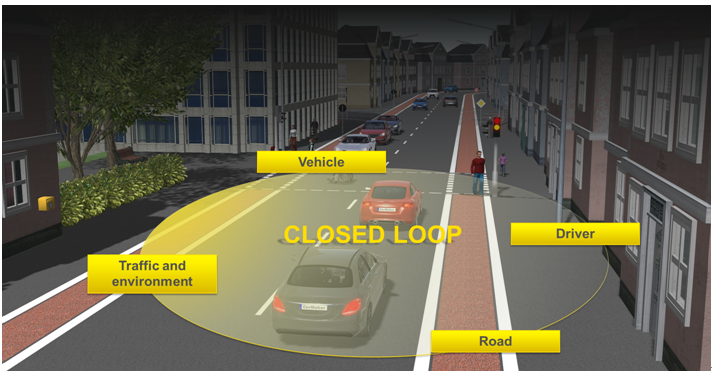
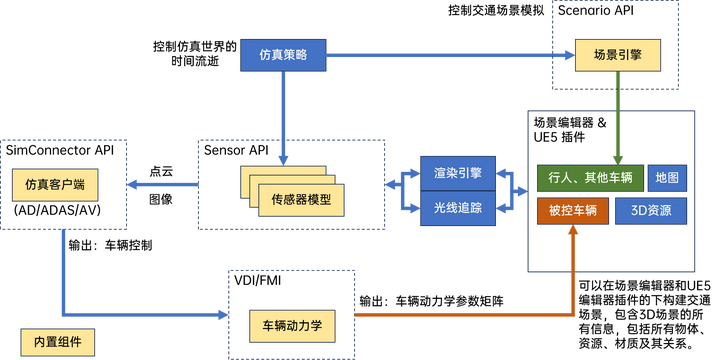
基于時(shí)間和成本的綜合考量,我們可以通過(guò)虛擬仿真技術(shù),對(duì)道路環(huán)境、交通、感知系統(tǒng)、決策規(guī)劃系統(tǒng)和執(zhí)行系統(tǒng)進(jìn)行仿真建模,在實(shí)驗(yàn)室環(huán)境下實(shí)現(xiàn)智能駕駛系統(tǒng)的虛擬仿真測(cè)試,加速智能駕駛研發(fā)。
智能駕駛仿真測(cè)試與傳統(tǒng)仿真測(cè)試相比,對(duì)車輛動(dòng)力學(xué)仿真精度要求更高,更關(guān)注車與環(huán)境的交互, 更重視測(cè)試場(chǎng)景的分析和測(cè)試場(chǎng)景數(shù)據(jù)庫(kù)的建設(shè)。
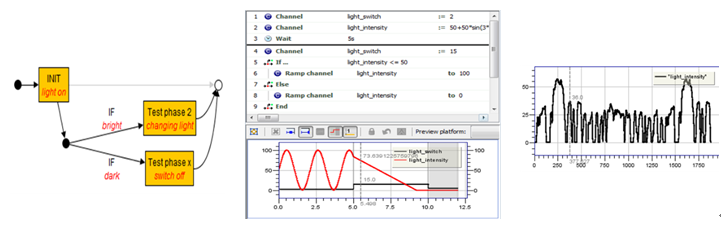
- 智能駕駛MIL/SIL解決方案
MIL/SIL測(cè)試主要測(cè)試算法模型的功能邏輯。北匯信息基于行業(yè)主流的虛擬仿真軟件(如IPG公司的CarMaker、TESIS公司的DYNA4等)和PikeTec公司的TPT自動(dòng)化測(cè)試工具,提供完整智能駕駛MIL/SIL解決方案,覆蓋AEB、LDW、TSR、HMA、LCDA、LKA、IACC、TJP、TJA、APA等決策規(guī)劃控制算法MIL測(cè)試,同時(shí)也能覆蓋傳感融合算法MIL測(cè)試。
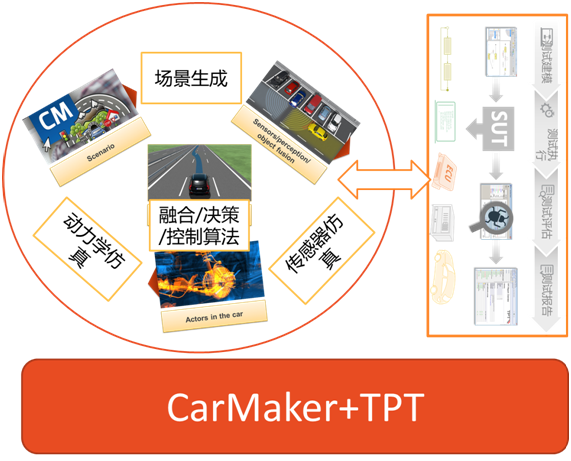
CarMaker統(tǒng)籌場(chǎng)景模型、傳感器模型和車輛動(dòng)力學(xué)模型的仿真。使得測(cè)試環(huán)境部署在統(tǒng)一工具鏈下,保證了測(cè)試過(guò)程數(shù)據(jù)交互具有非常高的一致性。
TPT提供了一套高效的測(cè)試建模方法,可以控制多種虛擬場(chǎng)景元素的參數(shù)輸入,并且能實(shí)現(xiàn)從測(cè)試執(zhí)行到測(cè)試報(bào)告生成的自動(dòng)化。
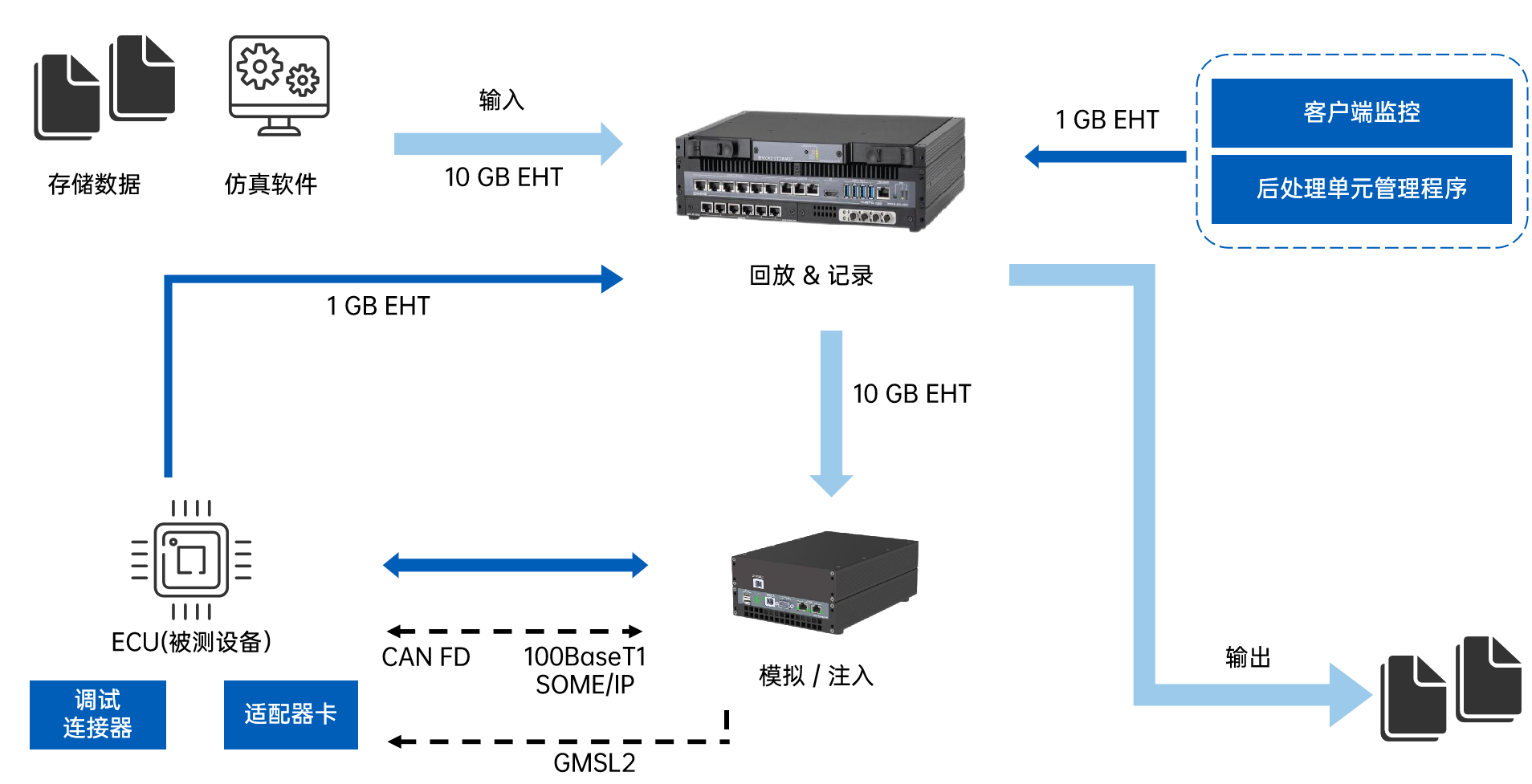
智能駕駛HIL解決方案
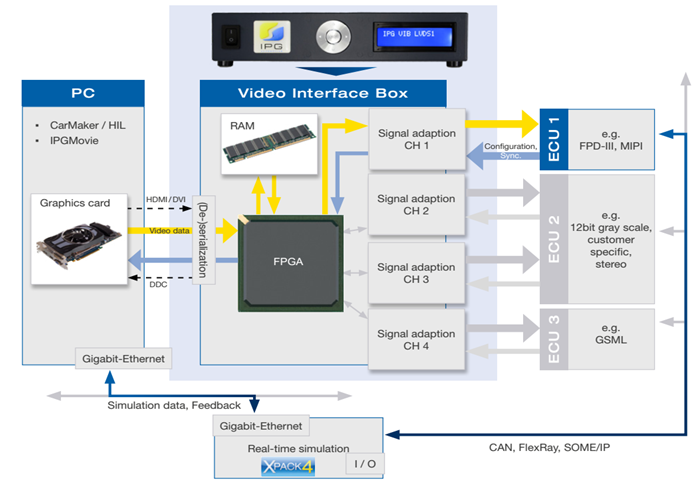
北匯信息基于行業(yè)主流的虛擬仿真軟件,主流的HIL硬件平臺(tái)、高性價(jià)比的雷達(dá)模擬器,提供包含雷達(dá)回波仿真、視頻暗箱、視頻流數(shù)據(jù)注入、超聲波回波仿真/數(shù)據(jù)流注入、激光雷達(dá)點(diǎn)云仿真等多種傳感仿真手段,同時(shí)也提供多自由度駕駛模擬器、制動(dòng)控制臺(tái)架、轉(zhuǎn)向控制臺(tái)架等解決方案。從而覆蓋單自動(dòng)駕駛控制器到自動(dòng)駕駛域的HIL測(cè)試。HIL測(cè)試框架如下:

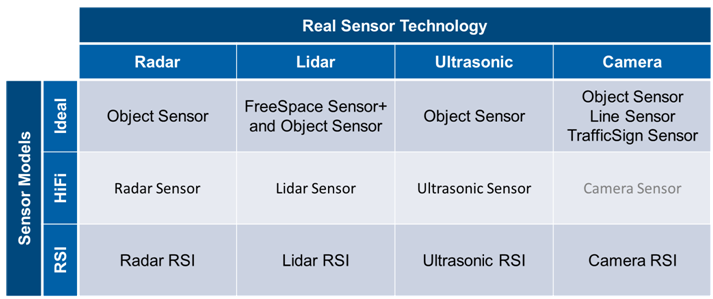
在HIL測(cè)試方案中,北匯信息將根據(jù)客戶不同的測(cè)試需求和對(duì)象提供多層次的傳感器仿真方式。
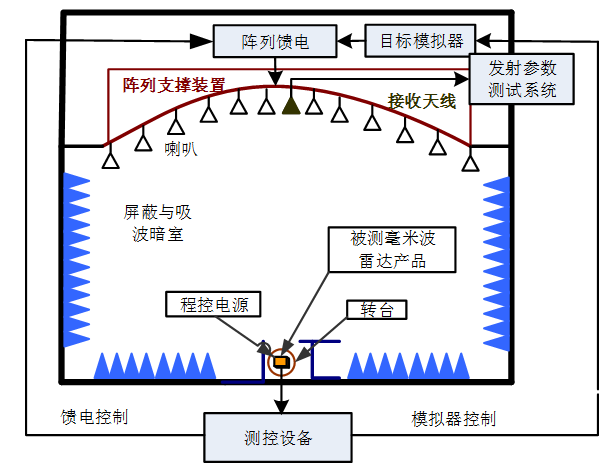
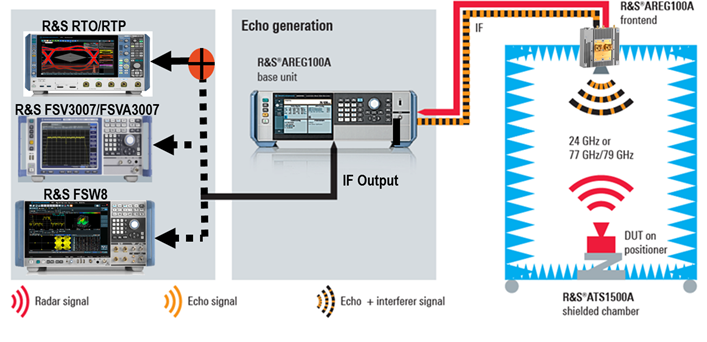
- 毫米波雷達(dá)回波模擬方案
基于華清瑞達(dá)雷達(dá)模擬器,提供多種組合的雷達(dá)回波模擬方案。可提供單方向4目標(biāo),雙方向8目標(biāo),甚至1000點(diǎn)以上目標(biāo)(基于成像雷達(dá)技術(shù))的回波仿真方案。產(chǎn)品特性:
- 可模擬3個(gè)點(diǎn)目標(biāo)或面目標(biāo)
- 范圍:23~27GHz,76~81GHz
- 距離范圍:0~1Km
- 速度范圍:±1000Km/h
- 角度范圍:可以定制
- 可模擬對(duì)方來(lái)車干擾
- 可模擬真實(shí)路口、匯車、上下坡、十字路口
- 可模擬道路場(chǎng)景,如障礙物、限高桿、不同氣象條件等
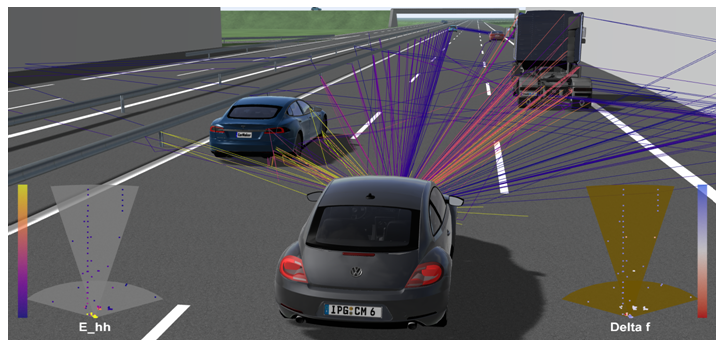
- 毫米波雷達(dá)數(shù)據(jù)流仿真方案
使用射線追蹤方法模擬電磁雷達(dá)波的傳播,具備全實(shí)時(shí)仿真功能。產(chǎn)品特性:
- 多路徑傳播
- 重復(fù)路徑回聲
- 相干加法
- 多普勒頻移
- 誤報(bào)仿真
- 攝像頭數(shù)據(jù)流注入仿真方案
通過(guò)仿真攝像頭數(shù)據(jù)流的方式進(jìn)行圖像處理相關(guān)智能駕駛應(yīng)用的測(cè)試。這比使用攝像頭暗箱方式能提供更真實(shí)的圖像來(lái)源,同時(shí)能夠仿真像素誤差、遮擋等故障場(chǎng)景。產(chǎn)品特性:
- 同時(shí)仿真4路攝像頭信號(hào)
- 單路攝像頭最高分辨率大于1080p
- 最高幀率大于70fps
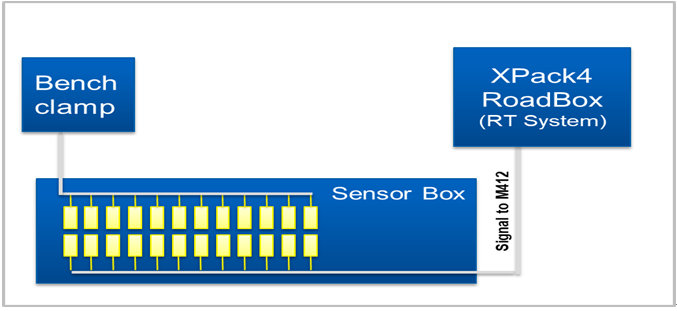
- 超聲波雷達(dá)仿真方案
根據(jù)超聲波傳感器換能特性來(lái)完成超聲波回波仿真,同時(shí)也支持超聲波硬線傳輸協(xié)議仿真。產(chǎn)品特性:
- 支持12路超聲波的仿真
- 每一個(gè)傳感器的超聲反射時(shí)間都可調(diào)
- 支持換能器驅(qū)動(dòng)與硬線仿真模式
- 頻率范圍20-100kHz
- 模擬距離0-10m范圍
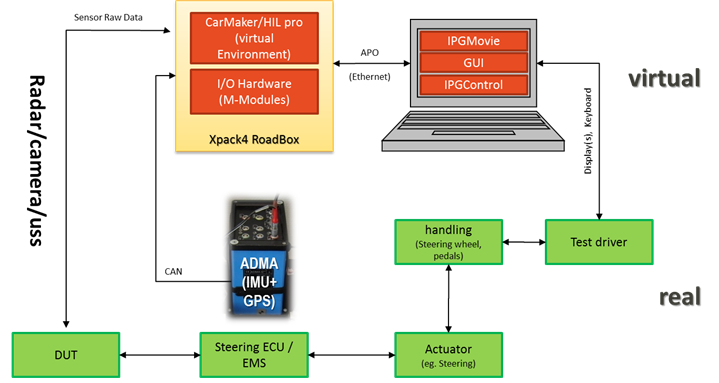
智能駕駛VIL解決方案
在車輛在環(huán)測(cè)試中,實(shí)車提供了真實(shí)的車輛動(dòng)力學(xué),我們只需使用仿真軟件模擬車輛周邊各種測(cè)試場(chǎng)景和交通流即可。北匯信息結(jié)合智能駕駛傳感仿真技術(shù)提供自動(dòng)泊車、行車等車輛在環(huán)解決方案。
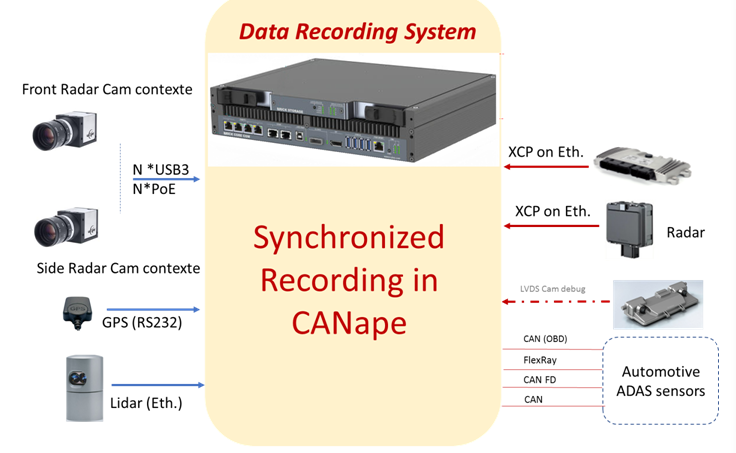
智能駕駛實(shí)車測(cè)試方案
實(shí)車路試是智能駕駛車輛研發(fā)過(guò)程中舉足輕重的一環(huán),通過(guò)路試能真實(shí)評(píng)估各個(gè)傳感系統(tǒng)和自動(dòng)駕駛功能的性能指標(biāo)。北匯信息基于Vector和b-plus公司的CANape、Brick PC推出智能駕駛路測(cè)數(shù)據(jù)采集整體解決方案,能同步采集實(shí)車運(yùn)行數(shù)據(jù)和各種傳感器數(shù)據(jù)。
雷達(dá)傳感器下線檢測(cè)設(shè)備
北匯信息基于Rohde & Schwarz的儀器儀表提供雷達(dá)傳感器下線檢測(cè)成套解決方案,覆蓋雷達(dá)發(fā)射/接收性能、目標(biāo)識(shí)別、方位區(qū)分、目標(biāo)距離、RCS等方面測(cè)試。
-
汽車電子
+關(guān)注
關(guān)注
3027文章
7985瀏覽量
167277 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2551瀏覽量
48806 -
智能網(wǎng)聯(lián)汽車
+關(guān)注
關(guān)注
9文章
1081瀏覽量
31098
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
經(jīng)緯恒潤(rùn)高性能智能駕駛解決方案,已獲江鈴汽車定點(diǎn)
智能駕駛場(chǎng)地和道路測(cè)試服務(wù)

虛擬駕駛仿真測(cè)試解決方案
智能駕駛HIL仿真測(cè)試解決方案

艙駕融合一體化測(cè)試解決方案--功能安全測(cè)試#艙駕融合 #智能駕駛 #ADAS #功能安全
部署更快,自動(dòng)化程度高!TOSUN同星線控底盤解決方案

毫末智行與高通聯(lián)合打造智能駕駛解決方案
華為發(fā)布以智能駕駛為核心的智能汽車解決方案新品牌—華為乾崑
地平線發(fā)布新一代Horizon SuperDrive?全場(chǎng)景智能駕駛解決方案

黑芝麻智能與騰訊云合作共同打造高性價(jià)比的智能駕駛系統(tǒng)解決方案

毫末智行與高通宣布采用Snapdragon Ride平臺(tái)打造智能駕駛解決方案

康謀方案 | 從概念到生產(chǎn)的自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案
康謀方案 | 基于場(chǎng)景的端到端硬件在環(huán)(HiL)測(cè)試智能解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論