 一個基于事件驅動的有限狀態機
一個基于事件驅動的有限狀態機
來源:https://gitee.com/simpost/EFSM/tree/master/
介紹
EFSM(event finite state machine,事件驅動型有限狀態機),是一個基于事件驅動的有限狀態機,主要應用于嵌入式設備的軟件系統中。
EFSM的設計原則是:簡單!EFSM的使用者只需要關心:
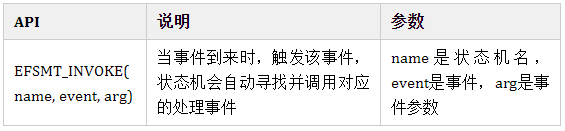
當事件到來時,通過EFSM取得對應事件的處理方法;
當特定事件到來,或者條件滿足時,調用狀態切換方法進行狀態切換。
由于EFSM的巧妙設計,避免了命名沖突的問題,你可以在一個程序中定義多個狀態機;要是能對不同狀態進行組織,還可以做出層次狀態機的結構。
EFSM總共分為兩個部分:
EFSM核心:由uthash.h、efsm.h和efsm_conf.h三個文件組成;他們構成了事件驅動型狀態機的核心;使用的時候只需要包含efsm.h即可;
EFSM擴展:在EFSM核心的基礎上,增加efsmt.h和efsmt.c兩個文件,這兩個文件會根據具體的狀態機創建狀態機線程,用于驅動狀態機運轉;使用的時候只需要包含efsmt.h即可;
接口總覽
EFSM總共提供了兩套接口,你只需要選擇其中套用法即可。全部接口概述如下:
使用狀態機工具集(EFSM核心)
若你想自己把控狀態機的整個運轉過程,可以直接使用EFSM核心,詳細接口如下。
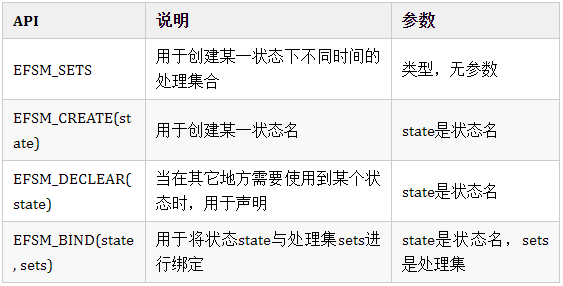
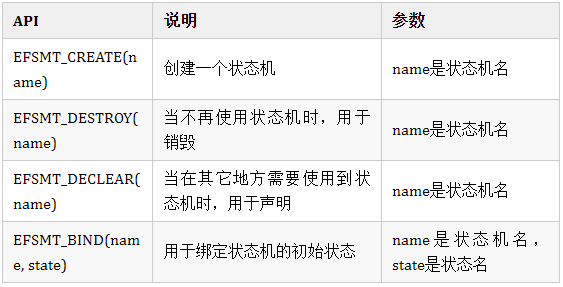
1. 狀態操作接口

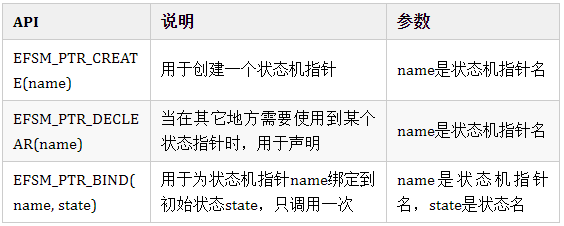
2. 狀態指針操作接口
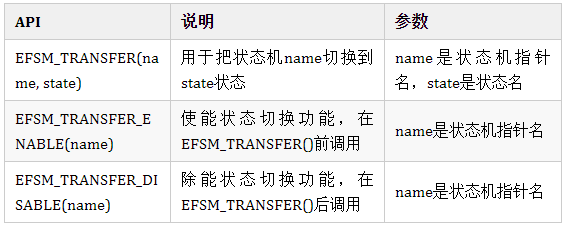
3. 狀態切換接口
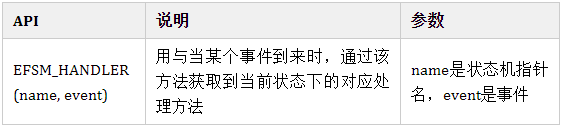
4. 獲取處理函數接口
使用狀態機
若你不關心狀態機的內部細節實現,需要一個可直接運轉的狀態機,那么請使用efsmt.h頭文件,并將efsmt.c編譯進你的源碼。詳細接口如下。
1. 狀態操作接口
2. 狀態機操作接口
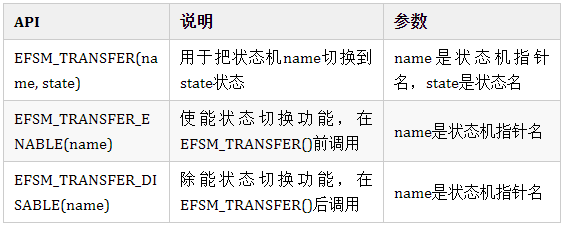
3. 狀態切換接口
4. 觸發事件接口
總結
從接口可以看出,創建處理集與狀態集,和狀態切換方法是完全一樣的;兩種方法的唯一差異就是:當事件來了之后,事件對應的處理是由你來控制,還是由狀態機內部進行控制。
使用說明
要使用EFSM,非常簡單,只需要如下三步:定義事件集、定義狀態集、使用狀態集。
定義事件集
在我們設計業務/功能時,首先對需要使用到的事件進行定義。具體實現方法是在efsm_event.h文件中,使用EFSM_EVENT()宏定義需要的事件。如果你需要定義多個狀態機,那請將不同狀態機的事件分塊保存,建議使用enum進行管理。比如:
enum {
EVENT_PLAY = EFSM_EVENT(1),
EVENT_STOP = EFSM_EVENT(2),
EVENT_NEXT = EFSM_EVENT(3),
EVENT_PREV = EFSM_EVENT(4),
EVENT_START = EFSM_EVENT(7), //not require continuous
};
定義狀態集
定義狀態:使用EFSM_CREATE(state)創建一個狀態state;在其它使用到它的地方用EFSM_DECLEAR(state)宏進行聲明;
定義處理集:使用EFSM_SETS state_sets定義一個狀態集合state_sets,其中每個事件可以對應一個處理函數,也可以對應多個函數,當然也可以為NULL;處理函數需滿足如下格式:
typedefvoid(*EFSM_EVENT_HANDLER)(EFSM_EVENT_TYPEevent,void*arg);
綁定狀態與處理集:在模塊初始化函數中調用EFSM_BIND(state, sets)宏將狀態state與處理集sets進行綁定;
使用狀態集
當為模塊/產品實現了所有的狀態,那么編寫業務應用程序來實現調度,讓所有的狀態機完美的運作起來。具體使用方法如下:
定義狀態指針:使用EFSM_PTR_CREATE(name)定義一個狀態指針name;當然你也可以定義多個狀態指針,每個指針對應一個狀態機。在其它使用到該狀態指針的地方使用EFSM_PTR_DECLEAR(name)宏進行聲明;
綁定初始狀態:在整個狀態機運作之前,需要使用EFSM_PTR_BIND(name, state)宏將狀態指針name與狀態state進行綁定;
獲取處理函數指針:當接收到某個事件時,可以通過EFSM_HANDLER(name,event)宏從狀態指針name中獲取對該事件的處理方法,第一個參數是狀態指針,第二個參數為事件;
狀態切換:當遇到某個事件,或者在事件處理函數中條件滿足,需要進行狀態切換時,使用下面流程進行切換:
EFSM_TRANSFER_ENABLE(name); EFSM_TRANSFER(name, state); EFSM_TRANSFER_DISABLE(name);
EFSM_TRANSFER_ENABLE(name)宏使能狀態指針name的切換能力;
EFSM_TRANSFER_DISABLE(name)宏除能狀態指針name的切換能力;
EFSM_TRANSFER(name, state)宏執行狀態指針name切換到state;
注意:做狀態切換時,必須滿足ENABLE()->TRANSFER()->DISABLE()的流程。這么做的目的,是為了讓編程者思考:狀態設計與狀態的跳轉是否必要與合理。
常見問題
使用過程中若遇到如下錯誤,是因為在正式使用前,沒有把狀態指針綁定到具體的狀態:
EFSM: cur-state-ptr have't bind a state: %xxx!!!使用過程中若遇到如下錯誤,是因為狀態切換動作不滿足ENABLE()->TRANSFER()->DISABLE()的流程:
EFSM:'xxx'switchto'xxx'failed!!!使用過程中,若遇到了死鎖或卡死,是因為狀態切換動作不滿足ENABLE()->TRANSFER()->DISABLE()的流程。 命名定義了處理函數,為什么每次EFSM_HANDLER()得到的都是NULL?答:因為你沒有將狀態與事件集進行綁定。 對于某個狀態沒有使用到的事件,我是否可以不對其定義? 答:完全可以,這樣還可以加快EFSM的處理速度。不過不建議直接刪除,而采用注釋的形式,比如:
EFSM_SETS online[] = { {EVENT_PLAY, online_play},
/*{EVENT_STOP, NULL}, */
{EVENT_NEXT, online_next},
/*{EVENT_PREV, NULL}, */
{EVENT_START, online_start},
};
審核編輯:湯梓紅
-
接口
+關注
關注
33文章
8598瀏覽量
151156 -
源碼
+關注
關注
8文章
641瀏覽量
29213 -
函數
+關注
關注
3文章
4331瀏覽量
62618 -
狀態機
+關注
關注
2文章
492瀏覽量
27541
原文標題:一個基于事件驅動的有限狀態機
文章出處:【微信號:c-stm32,微信公眾號:STM32嵌入式開發】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是有限狀態機呢
有限狀態機的建模與優化設計
VHDL有限狀態機設計-ST
初學者對有限狀態機(FSM)的設計的認識







 工商網監
工商網監
評論