 middlebury數據集是什么
middlebury數據集是什么
Middlebury立體測評網站是計算機視覺領域的重要資源,它為研究人員和工程師提供了一個評估和比較立體視覺算法的標準化平臺。無論你是學術界的研究者還是工業界的從業者,通過使用Middlebury立體測評網站,你可以在算法開發中更好地了解和改進立體匹配算法。本文將為你提供關于Middlebury立體測評網站的詳細使用指南,幫助你充分利用該平臺。
一、middlebury數據集是什么?
Middlebury數據集是用于立體視覺算法評估的一系列標準化數據集,由Middlebury大學維護。立體視覺是計算機視覺領域中的一個重要研究方向,其目標是從不同角度獲取的圖像中,恢復出場景中物體的三維信息,即深度或視差圖。
Middlebury數據集的設計旨在提供一組公共標準,讓研究者和開發者能夠在相同的基準下比較和評估他們開發的立體視覺算法。這些數據集涵蓋了多個任務,包括立體圖像重建、立體匹配、光流估計等。
Middlebury數據集是圖像計算領域中廣為使用的一系列立體和光流圖像數據集。它是由Middlebury計算機視覺研究組織創建和維護的,旨在為研究者和開發者提供可靠的圖像數據,以評估和比較不同的計算機視覺算法。
其中,立體圖像數據集包含由兩個或多個攝像機捕獲的圖像對,用于生成立體深度地圖。光流圖像數據集則包含了連續幀之間的像素位移信息,用于分析和推斷對象在時間上的運動。
Middlebury數據集以其高質量的標注和真實場景的代表性而聞名。這些數據集經過仔細設計和選取,以提供豐富的挑戰性問題和復雜的圖像場景,以促進對計算機視覺算法的真實性能評估。
對于研究者和開發者來說,Middlebury數據集是一份寶貴的資源,可以用于測試自己的算法、比較不同算法的性能,并為新算法的開發提供可靠的基準。大量的研究論文和學術會議都使用Middlebury數據集作為他們算法的評估標準。
Middlebury數據集可以通過Middlebury計算機視覺研究組織的官方網站免費獲取。研究者和開發者可以根據自己的需求和興趣,在這些數據集上進行各種圖像計算任務的研究和實驗。
二、middlebury網址是什么?
https://vision.middlebury.edu/
根據 vision.middlebury.edu 網站的介紹,這是一個計算機視覺評估和數據集的存儲庫。網站包含以下內容:
Middlebury立體視覺頁面:用于評估密集的雙幀立體視覺算法(詳細介紹見IJCV 2002)。
多視圖立體頁面:用于評估多視圖立體視覺算法(CVPR 2006上發布)。
MRF頁面:用于評估用于馬爾可夫隨機場的能量最小化方法(ECCV 2006上發布)。
光流頁面:用于評估光流算法(ICCV 2007上發布)。
色彩頁面:提供用于評估數字相機色彩處理的數據集(BMVC 2009上發布)
三、middlebury立體測評?
https://vision.middlebury.edu/stereo/
https://vision.middlebury.edu/stereo/ 是Middlebury立體視覺頁面的鏈接,在這個頁面上,你可以找到關于立體視覺算法的評估和數據集的詳細信息。
Middlebury立體視覺頁面是用于評估密集的兩幀立體視覺算法的平臺。它包括了:
當前算法的在線排名
許多具有地面實況差異的立體數據集
一個離線腳本,評估立體聲算法
一個在線提交腳本,評估立體聲算法
在這個頁面上,你可以找到每個數據集的詳細描述,包括數據集的來源、圖像數量、分辨率和深度圖等。此外,頁面還提供了一些參考算法和評價標準,用于幫助評估和比較不同算法的性能。該頁面還包含了一些用于可視化和比較算法結果的工具和軟件。你可以使用這些工具來直觀地呈現立體視覺算法的輸出,并與其他算法進行比較。
3.1 當前算法的在線排名
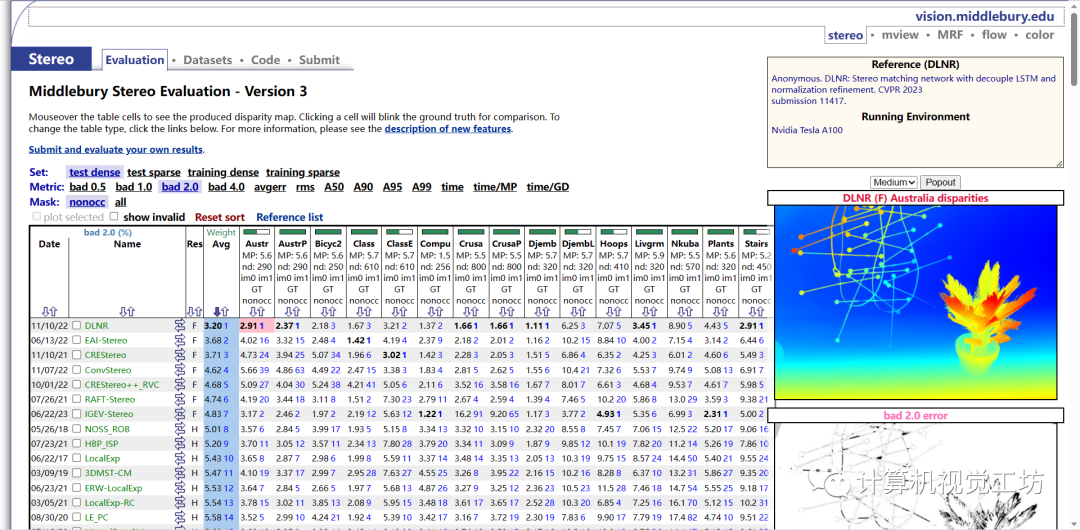
該頁面包含了一個交互式的表格,用于展示不同數據集和評估指標的結果。你可以通過鼠標懸停在表格單元格上,查看生成的視差圖。同時,點擊單元格可以切換顯示地面真實值以進行比較。你還可以通過點擊頁面上的鏈接,切換表格類型或了解新功能的描述。
Set: 設置或數據集的不同類型。在這種情況下,可能有以下設置/數據集:
test: 測試集
densetest: 密集測試集
sparsetraining: 稀疏訓練集
densetraining: 密集訓練集
sparse: 稀疏數據
Metric: 表示用于對視差圖進行評估的不同指標。在這種情況下,可能有以下指標:
bad 0.5: 視差值誤差小于等于0.5的比例
bad 1.0: 視差值誤差小于等于1.0的比例
bad 2.0: 視差值誤差小于等于2.0的比例
bad 4.0: 視差值誤差小于等于4.0的比例
avgerr: 平均誤差
rms: 均方根誤差
A50: 視差誤差小于等于50%的比例
A90: 視差誤差小于等于90%的比例
A95: 視差誤差小于等于95%的比例
A99: 視差誤差小于等于99%的比例
time: 執行時間
time/MP: 每百萬像素的執行時間
time/GD: 每個視差的執行時間
Mask: 掩碼或遮擋的類型。在這種情況下,可能有以下類型:
nonocc: 非遮擋的區域
all: 所有區域(包括遮擋區域和非遮擋區域)
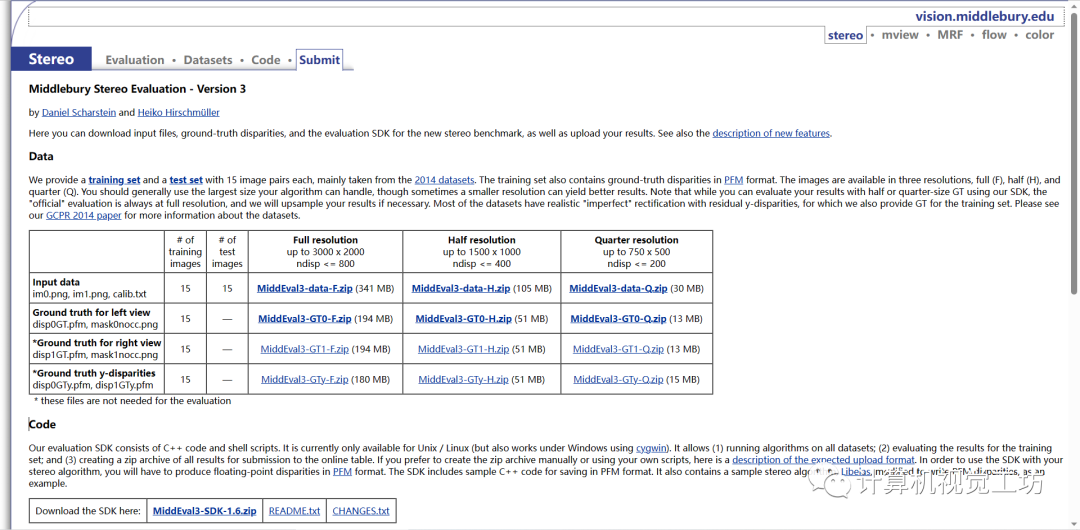
3.2 許多具有地面實況差異的立體數據集
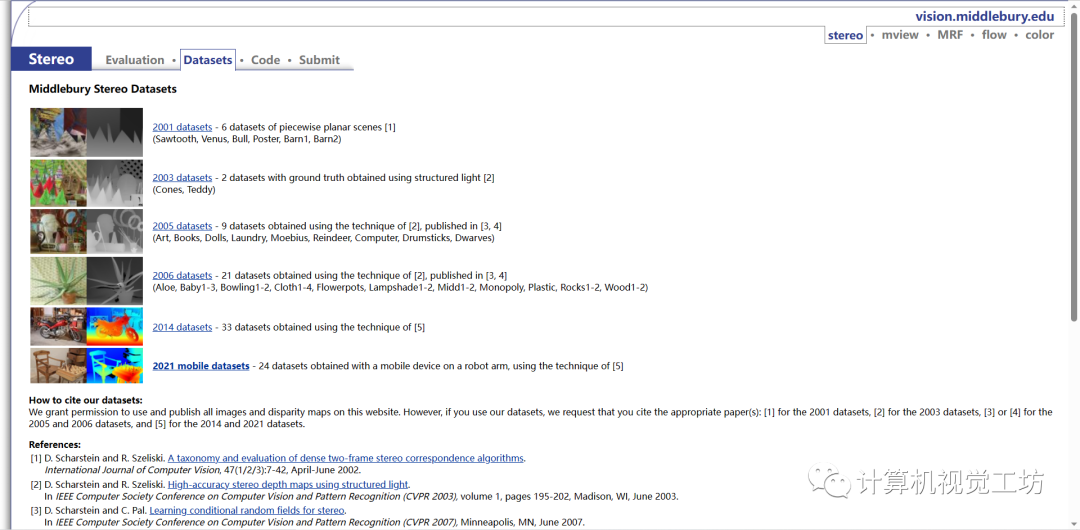
在該頁面上,你可以找到middleburry提供的多個立體數據集的詳細信息和下載鏈接。這些數據集包含了成對的左右圖像,以及對應的地面真實視差圖。這些數據集的制作遵循一定的標準和規范,廣泛應用于立體視覺算法的訓練和評估。
頁面上列出的數據集包括了各種場景和復雜度,并標注了不同數據集的特點和用途。你可以瀏覽不同數據集的描述,了解其特點以及適用的應用場景。同時,你也可以點擊鏈接下載對應數據集的圖像和視差文件。
3.3 一個離線腳本,評估立體聲算法
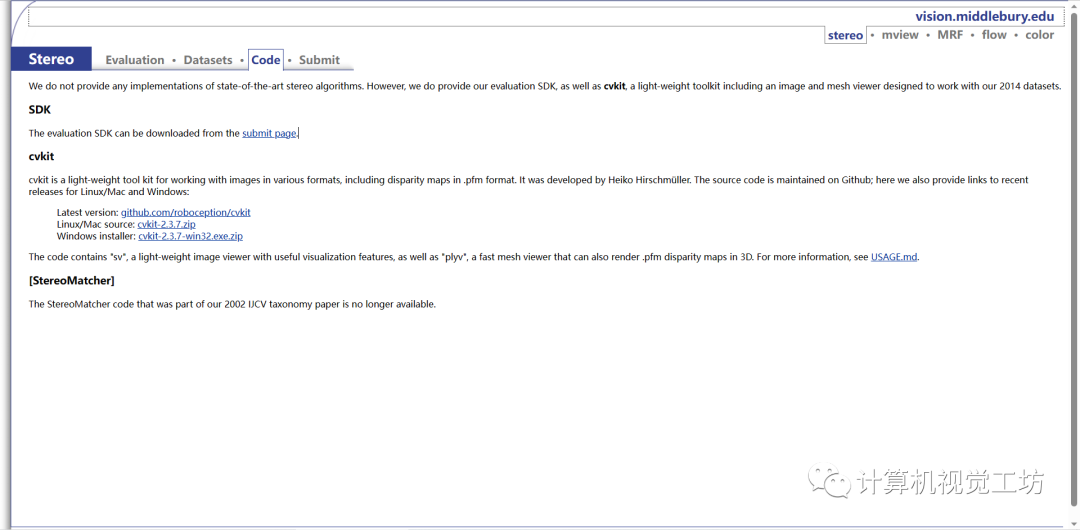
cvkit是一個輕量級的圖像處理工具包,可用于處理各種格式的圖像,包括.pfm格式的視差圖。它由Heiko Hirschmüller開發。源代碼在Github上維護;在這里,作者還提供了針對Linux/Mac和Windows最近發布版本的鏈接:
最新版本:https://github.com/roboception/cvkit
該代碼包含了名為"sv"的輕量級圖像查看器,具有有用的可視化功能,并且包含了"plyv",一個快速的網格查看器,也可以在3D中呈現.pfm的視差圖。有關更多信息,請參閱USAGE.md。這里也推薦「3D視覺工坊」新課程《徹底剖析激光-視覺-IMU-GPS融合SLAM算法:理論推導、代碼講解和實戰》
3.4 一個在線提交腳本,評估立體聲算法
調整 SDK 以運行算法或手動創建 zip 文件后,您可以上傳結果。您可以根據需要多次上傳和評估訓練集上的結果。與之前版本的立體評估一樣,您將在臨時表中看到您的結果與訓練集上所有其他提交的結果的比較情況。獲得最終結果集后,您可以將結果上傳到訓練集和測試集上,并請求發布這兩組結果。為了防止擬合測試數據,我們只允許每個方法這樣做一次,并且在測試結果發布之前,您將無法看到測試結果。請僅上傳“最終”結果(已發表或即將提交給會議或期刊)。請注意,我們只允許表中每個發布有一個結果。如果您有多個算法變體,則可以在訓練集上評估它們,但應僅選擇并上傳一個結果進行發布。
審核編輯:彭菁
-
圖像
+關注
關注
2文章
1084瀏覽量
40465 -
網站
+關注
關注
2文章
258瀏覽量
23162 -
計算機視覺
+關注
關注
8文章
1698瀏覽量
45993 -
數據集
+關注
關注
4文章
1208瀏覽量
24701
原文標題:總結!Middlebury立體測評網站使用指南
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問NanoEdge AI數據集該如何構建?

基于非對稱空間金字塔池化模型的CNN結構

基于非對稱空間金字塔池化模型的CNN結構
最全自動駕駛數據集分享系列一:目標檢測數據集






 工商網監
工商網監
評論