 OpenHarmony:如何使用HDF平臺驅動控制PWM
OpenHarmony:如何使用HDF平臺驅動控制PWM
1、程序介紹
本程序是基于OpenHarmony標準系統編寫的平臺驅動案例:PWM
2、基礎知識
2.1、PWM概述
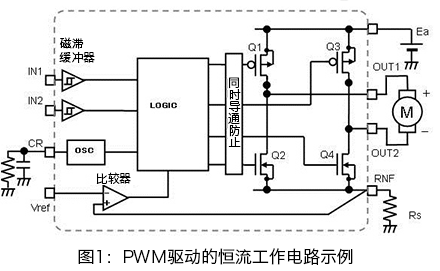
PWM(Pulse Width Modulation)即脈沖寬度調制,是一種對模擬信號電平進行數字編碼并將其轉換為脈沖的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中。通常情況下,在使用馬達控制、背光亮度調節時會用到PWM模塊。
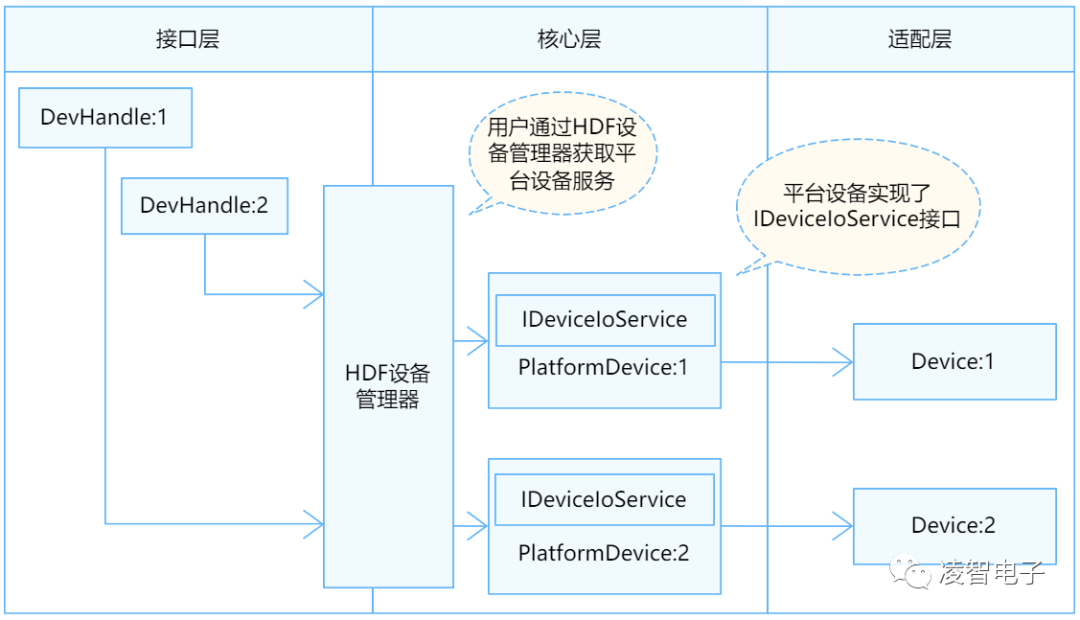
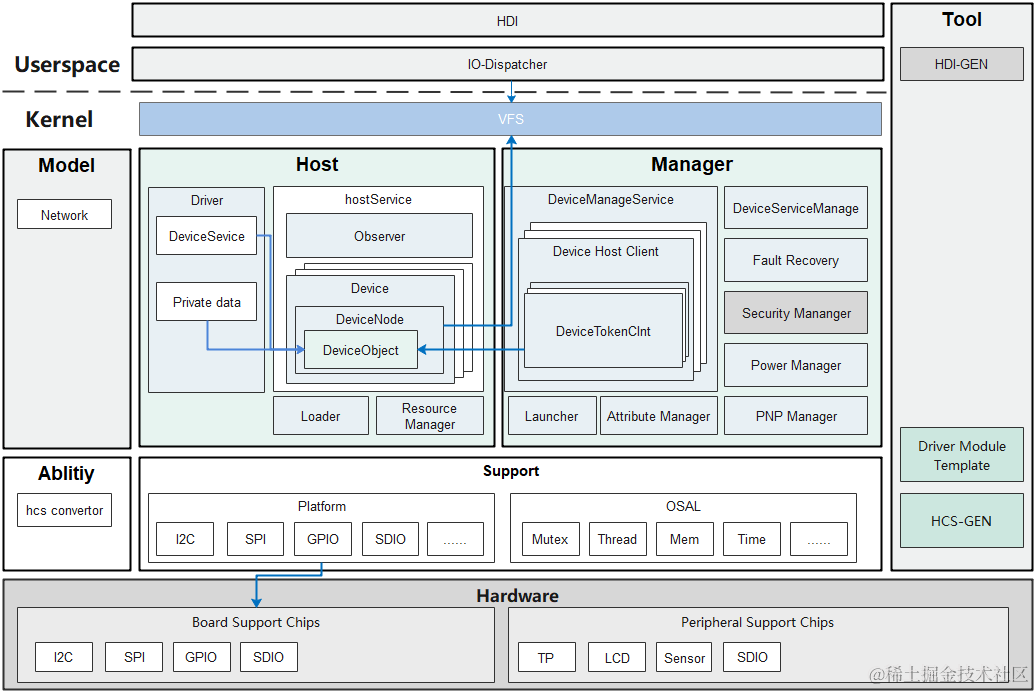
在HDF框架中,PWM接口適配模式采用獨立服務模式(如圖1所示)。在這種模式下,每一個設備對象會獨立發布一個設備服務來處理外部訪問,設備管理器收到API的訪問請求之后,通過提取該請求的參數,達到調用實際設備對象的相應內部方法的目的。獨立服務模式可以直接借助HDF設備管理器的服務管理能力,但需要為每個設備單獨配置設備節點,增加內存占用。
獨立服務模式下,核心層不會統一發布一個服務供上層使用,因此這種模式下驅動要為每個控制器發布一個服務,具體表現為:
驅動適配者需要實現HdfDriverEntry的Bind鉤子函數以綁定服務。
device_info.hcs文件中deviceNode的policy字段為1或2,不能為0。
PWM模塊各分層作用:
接口層提供打開PWM設備、設置PWM設備周期、設置PWM設備占空時間、設置PWM設備極性、設置PWM設備參數、獲取PWM設備參數、使能PWM設備、禁止PWM設備、關閉PWM設備的接口。
核心層主要提供PWM控制器的添加、移除以及管理的能力,通過鉤子函數與適配層交互。
適配層主要是將鉤子函數的功能實例化,實現具體的功能。
PWM獨立服務模式結構圖,如下圖所示:
2.2、PWM驅動開發
2.2.1、PWM驅動開發接口
為了保證上層在調用PWM接口時能夠正確的操作PWM控制器,核心層在//drivers/hdf_core/framework/support/platform/include/pwm/pwm_core.h中定義了以下鉤子函數,驅動適配者需要在適配層實現這些函數的具體功能,并與鉤子函數掛接,從而完成適配層與核心層的交互。
PwmMethod定義:
struct PwmMethod { int32_t (*setConfig)(struct PwmDev *pwm, struct PwmConfig *config); int32_t (*open)(struct PwmDev *pwm); int32_t (*close)(struct PwmDev *pwm);};
PwmMethod結構體成員的鉤子函數功能說明:

2.2.2、PWM驅動開發步驟
PWM模塊適配包含以下四個步驟:
驅動實例化驅動入口。
配置屬性文件。
實例化PWM控制器對象。
驅動調試。
我們以///drivers/hdf_core/adapter/khdf/linux/platform/pwm/pwm_adapter.c為例(該PWM驅動是建立于Linux PWM子系統基礎上創建)。
2.2.2.1、驅動實例化驅動入口
驅動入口必須為HdfDriverEntry(在hdf_device_desc.h中定義)類型的全局變量,且moduleName要和device_info.hcs中保持一致。HDF框架會將所有加載的驅動的HdfDriverEntry對象首地址匯總,形成一個類似數組的段地址空間,方便上層調用。一般在加載驅動時HDF會先調用Bind函數,再調用Init函數加載該驅動。當Init調用異常時,HDF框架會調用Release釋放驅動資源并退出。
PWM驅動入口開發參考:
struct HdfDriverEntry g_hdfPwm = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_PWM", .Bind = HdfPwmBind, .Init = HdfPwmInit, .Release = HdfPwmRelease,};
HDF_INIT(g_hdfPwm);
2.2.2.2、配置屬性文件
完成驅動入口注冊之后,需要在device_info.hcs文件中添加deviceNode信息,deviceNode信息與驅動入口注冊相關。本例以兩個PWM控制器為例,如有多個器件信息,則需要在device_info.hcs文件增加對應的deviceNode信息。器件屬性值與核心層PwmDev成員的默認值或限制范圍有密切關系,比如PWM設備號,需要在pwm_config.hcs文件中增加對應的器件屬性。
本次案例以rk3568為案例(即文件//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs),添加deviceNode描述,具體修改如下:
device_pwm :: device { device0 :: deviceNode { // 為每一個PWM控制器配置一個HDF設備節點 policy = 2; // 標識向內核和用戶態發布服務 priority = 80; // 驅動啟動優先級 permission = 0644; // 驅動創建設備節點權限 moduleName = "HDF_PLATFORM_PWM"; // 【必要】用于指定驅動名稱,需要與期望的驅動Entry中的moduleName一致 serviceName = "HDF_PLATFORM_PWM_0"; // 【必要且唯一】驅動對外發布服務的名稱 deviceMatchAttr = "linux_pwm_adapter_0"; // 【必要】用于配置控制器私有數據,要與pwm_config.hcs中對應控制器保持一致,具體的控制器信息在pwm_config.hcs中 } device1 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_1"; deviceMatchAttr = "linux_pwm_adapter_1"; } device2 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_2"; deviceMatchAttr = "linux_pwm_adapter_2"; } device3 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_3"; deviceMatchAttr = "linux_pwm_adapter_3"; } device4 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_4"; deviceMatchAttr = "linux_pwm_adapter_4"; }}
pwm_config.hcs 配置參考//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/pwm_config.hcs,具體修改如下:
root { platform { pwm_config { template pwm_device { // 【必要】配置模板,如果下面節點使用時繼承該模板,則節點中未聲明的字段會使用該模板中的默認值 serviceName = ""; // 對外服務名稱,必須是唯一 match_attr = ""; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致 num = 0; // 【必要】設備號 }
device_pwm_0x00000000 :: pwm_device { // 存在多個設備時,請逐一添加相關HDF節點和設備節點信息。 num = 0; match_attr = "linux_pwm_adapter_0"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致 }
device_pwm_0x00000001 :: pwm_device { num = 1; match_attr = "linux_pwm_adapter_1"; }
device_pwm_0x00000002 :: pwm_device { num = 2; match_attr = "linux_pwm_adapter_2"; }
device_pwm_0x00000003 :: pwm_device { num = 3; match_attr = "linux_pwm_adapter_3"; }
device_pwm_0x00000004 :: pwm_device { num = 4; match_attr = "linux_pwm_adapter_4"; } } }}
2.2.2.3、實例化PWM控制器對象
完成驅動入口注冊之后,下一步就是以核心層PwmDev對象的初始化為核心,包括驅動適配者自定義結構體(傳遞參數和數據),實例化PwmDev成員PwmMethod(讓用戶可以通過接口來調用驅動底層函數),實現HdfDriverEntry成員函數(Bind、Init、Release)。
static int32_t HdfPwmOpen(struct PwmDev *pwm);static int32_t HdfPwmClose(struct PwmDev *pwm);static int32_t HdfPwmSetConfig(struct PwmDev *pwm, struct PwmConfig *config);
// 定義PwmDev成員PwmMethod,實現相應接口struct PwmMethod g_pwmOps = { .setConfig = HdfPwmSetConfig, .open = HdfPwmOpen, .close = HdfPwmClose,};
static int32_t HdfPwmBind(struct HdfDeviceObject *obj);static int32_t HdfPwmInit(struct HdfDeviceObject *obj){ ...... pwm->cfg.number = 0; pwm->num = num; pwm->method = &g_pwmOps; // 將PwmMethod綁定到pwm->method pwm->busy = false; ret = PwmDeviceAdd(obj, pwm); // 添加Pwm設備到PWM列表中 if (ret != HDF_SUCCESS) { HDF_LOGE("%s: error probe, ret is %d", __func__, ret); OsalMemFree(pwm); } ......}static void HdfPwmRelease(struct HdfDeviceObject *obj);
2.2.2.4、驅動調試
建議先在Linux下修改確認,再移植到OpenHarmony。
2.3、PWM應用開發
通常情況下,在使用馬達控制、背光亮度調節時會用到PWM模塊。
2.3.1、接口說明
PWM模塊提供的主要接口如下表所示,具體API詳見//drivers/hdf_core/framework/include/platform/pwm_if.h。
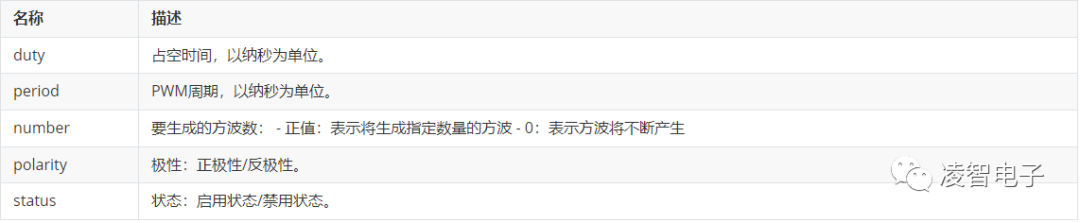
PwmConfig結構體介紹如下所示:
 PWM驅動API接口功能介紹如下所示:
PWM驅動API接口功能介紹如下所示:

(1)PwmOpen
在操作PWM設備時,首先要調用PwmOpen獲取PWM設備句柄,該函數會返回指定設備號的PWM設備句柄。
DevHandle PwmOpen(uint32_t num);
PwmOpen參數定義如下:
 PwmOpen返回值定義如下:
PwmOpen返回值定義如下:
 假設系統中的PWM設備號為0,獲取該PWM設備句柄的示例如下:
假設系統中的PWM設備號為0,獲取該PWM設備句柄的示例如下:
uint32_t num = 0; // PWM設備號DevHandle handle = NULL;
handle = PwmOpen(num); // 打開PWM 0設備并獲取PWM設備句柄if (handle == NULL) { HDF_LOGE("PwmOpen: open pwm_%u failed.\n", num); return;}
(2)PwmClose
關閉PWM設備,系統釋放對應的資源。
void PwmClose(DevHandle handle);
PwmClose參數定義如下:
 PwmClose返回值定義如下:
PwmClose返回值定義如下:

(3)PwmEnable
使能PWM設備。
int32_t PwmEnable(DevHandle handle);
PwmEnable參數定義如下:
 PwmEnable返回值定義如下:
PwmEnable返回值定義如下:

(4)PwmDisable
禁用PWM設備。
int32_t PwmDisable(DevHandle handle);
PwmDisable參數定義如下:

PwmDisable返回值定義如下:

(5)PwmSetPeriod
設置PWM設備周期
int32_t PwmSetPeriod(DevHandle handle, uint32_t period);
PwmSetPeriod參數定義如下:
 PwmSetPeriod返回值定義如下:
PwmSetPeriod返回值定義如下:

(6)PwmSetDuty
設置PWM設備占空時間。
int32_t PwmSetDuty(DevHandle handle, uint32_t duty);
PwmSetDuty參數定義如下:
 PwmSetDuty返回值定義如下:
PwmSetDuty返回值定義如下:

(7)PwmSetPolarity
設置PWM設備極性。
int32_t PwmSetPolarity(DevHandle handle, uint8_t polarity);
PwmSetDuty參數定義如下:
 PwmSetDuty返回值定義如下:
PwmSetDuty返回值定義如下:

(8)PwmSetConfig
設置PWM設備參數。
int32_t PwmSetConfig(DevHandle handle, struct PwmConfig *config);
PwmSetConfig參數定義如下:

PwmSetConfig返回值定義如下:

(9)PwmGetConfig
獲取PWM設備參數。
int32_t PwmGetConfig(DevHandle handle, struct PwmConfig *config);
PwmGetConfig參數定義如下:

PwmGetConfig返回值定義如下:

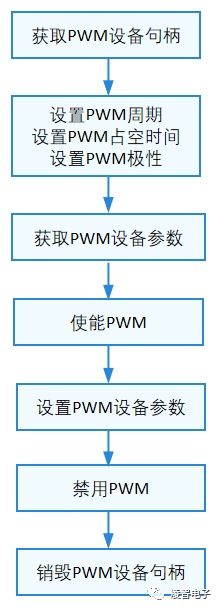
2.2.2、開發流程
使用PWM的一般流程如下圖所示:
3、程序解析
3.1、準備工作
查看《凌蒙派-RK3568開發板排針說明表》(即Git倉庫的//docs/board/凌蒙派-RK3568開發板排針說明表v1.0.xlsx),選中PWM7_IR(即GPIO0_C6)。
3.2、Linux內核解析
3.2.1、創建Linux內核Git
請參考《OpenHarmony如何為內核打patch》(即Git倉庫的//docs/OpenHarmony如何為內核打patch.docx)。
3.2.2、修改設備樹PWM7配置
修改//arch/arm64/boot/dts/rockchip/rk3568-lockzhiner.dtsi(即該目錄是指已打Patch后的Linux內核,不是OpenHarmony主目錄),具體如下所示:
&pwm7 { status = "okay";};
3.2.3、創建內核patch
請參考《OpenHarmony如何為內核打patch》(即Git倉庫的//docs/OpenHarmony如何為內核打patch.docx)。
3.2.4、替換OpenHarmony的內核patch
將制作出的kernel.patch替換到//kernel/linux/patches/linux-5.10/rk3568_patch/kernel.patch即可。
3.3、OpenHarmony配置樹配置
該部分不用特殊配置,本開發案例已經編寫好。
3.3.1、device_info.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs已定義好,具體如下:
device_pwm :: device { device0 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_0"; deviceMatchAttr = "linux_pwm_adapter_0"; } device1 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_1"; deviceMatchAttr = "linux_pwm_adapter_1"; } device2 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_2"; deviceMatchAttr = "linux_pwm_adapter_2"; } device3 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_3"; deviceMatchAttr = "linux_pwm_adapter_3"; } device4 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_4"; deviceMatchAttr = "linux_pwm_adapter_4"; }}
注意:policy必須為2,表示對內核態和用戶態提供服務。否則,應用程序無法調用。
3.3.2、pwm_config.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/pwm_config.hcs,具體內容如下:
root { platform { pwm_config { template pwm_device { serviceName = ""; match_attr = ""; num = 0; }
device_pwm_0x00000000 :: pwm_device { num = 0; match_attr = "linux_pwm_adapter_0"; }
device_pwm_0x00000001 :: pwm_device { num = 1; match_attr = "linux_pwm_adapter_1"; }
device_pwm_0x00000002 :: pwm_device { num = 2; match_attr = "linux_pwm_adapter_2"; }
device_pwm_0x00000003 :: pwm_device { num = 3; match_attr = "linux_pwm_adapter_3"; }
device_pwm_0x00000004 :: pwm_device { num = 4; match_attr = "linux_pwm_adapter_4"; } } }}
注意:上述的num為PwmOpen(uint32_t num),它是Linux PWM的排序序號(即PWM7的num是排列序號3,從0開始排序),不是特指PWM實際編號(即PWM7)。
3.4、OpenHarmony PWM平臺驅動
在//drivers/hdf_core/adapter/khdf/linux/platform/pwm/pwm_adapter.c已編寫對接Linux PWM驅動的相關代碼,具體內容如下:
struct HdfDriverEntry g_hdfPwm = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_PWM", .Bind = HdfPwmBind, .Init = HdfPwmInit, .Release = HdfPwmRelease,};
HDF_INIT(g_hdfPwm);
3.5、應用程序
3.5.1、pwm_test.c
PWM相關頭文件如下所示:
#include "pwm_if.h" // PWM標準接口頭文件
主函數定義PWM接口調用,具體如下:
int main(int argc, char* argv[]){ DevHandle handle = NULL; int32_t ret;...... // 打開pwm設備 handle = PwmOpen(m_pwm_device_id); if (handle == NULL) { PRINT_ERROR("PwmOpen failed\n"); return -1; }
// 配置pwm設備 ret = PwmSetCfg_Ext1(handle, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number); // ret = PwmSetCfg_Ext2(handle, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number); if (ret != 0) { PRINT_ERROR("PwmSetCfg_Ext failed and ret = %d\n", ret); // 關閉pwm設備 PwmClose(handle); return -1; }
printf("Pwm enable successful and pwm device id(%d), period(%d), duty(%d), polarity(%d), status(%d), number(%d)\n", m_pwm_device_id, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number);
// 關閉pwm設備 PwmClose(handle);
return 0;}
其中,PwmSetCfg_Ext1函數定義如何配置PWM相關參數,具體如下所示:
/**************************************************************** 函數名稱: PwmSetCfg_Ext1* 說 明: 設置PWM相關屬性,使用PwmSetConfig等接口* 參 數: * @handle: PWM設備句柄* @period: PWM設備周期* @duty: PWM設備占空時間* @polarity: PWM設備極性* @status: PWM使能/禁用* @number: PWM產生方波的數目* 返 回 值: 0為成功,反之為失敗***************************************************************/int32_t PwmSetCfg_Ext1(DevHandle handle, uint32_t period, uint32_t duty, uint8_t polarity, uint8_t status, uint32_t number){ int32_t ret; struct PwmConfig config;
// 判斷handle是否為空 if (handle == NULL) { PRINT_ERROR("handle is error\n"); return -1; }
// 獲取pwm設備參數 ret = PwmGetConfig(handle, &config); if (ret != 0) { PRINT_ERROR("PwmGetConfig failed and ret = %d\n", ret); return -1; }
// 設置config config.period = period; config.duty = duty; config.polarity = polarity; config.status = status; config.number = number;
// 設置pwm設備參數 ret = PwmSetConfig(handle, &config); if (ret != 0) { PRINT_ERROR("PwmSetConfig failed and ret = %d\n", ret); return -1; }
return 0;}
3.5.2、BUILD.gn
編寫應用程序的BUILD.gn,具體內容如下:
import("http://build/ohos.gni")import("http://drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_pwm_test")ohos_executable("rk3568_pwm_test") { sources = [ "pwm_test.c" ] include_dirs = [ "$hdf_framework_path/include", "$hdf_framework_path/include/core", "$hdf_framework_path/include/osal", "$hdf_framework_path/include/platform", "$hdf_framework_path/include/utils", "$hdf_uhdf_path/osal/include", "$hdf_uhdf_path/ipc/include", "http://base/hiviewdfx/hilog/interfaces/native/kits/include", "http://third_party/bounds_checking_function/include", ]
deps = [ "$hdf_uhdf_path/platform:libhdf_platform", "$hdf_uhdf_path/utils:libhdf_utils", "http://base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog", ]
cflags = [ "-Wall", "-Wextra", "-Werror", "-Wno-format", "-Wno-format-extra-args", ]
part_name = "product_rk3568" install_enable = true}
3.5.3、參與應用程序編譯
編輯//vendor/lockzhiner/rk3568/samples/BUILD.gn,開啟編譯選項。具體如下:
"b05_platform_device_pwm/app:rk3568_pwm_test",
4、程序編譯
建議使用docker編譯方法,運行如下:
hb set -root .hb set# 選擇lockzhiner下的rk3568編譯分支。hb build -f
5、運行結果
運行如下:
# rk3568_pwm_test -P 40000000 -d 20000000 -p 0 -s 1 -n 1000000 -i 3pwm id: 3pwm period: 40000000pwm duty: 20000000pwm polarity: 0pwm status: 1pwm wave number: 1000000Pwm enable successful and pwm device id(3), period(40000000), duty(20000000), polarity(0), status(1), number(1000000)#
使用示波器連接排線的0_C6(即GPIO0_C6,即PWM7),可以看到如下:

-
PWM
+關注
關注
114文章
5193瀏覽量
214242 -
開發板
+關注
關注
25文章
5082瀏覽量
97717 -
驅動控制
+關注
關注
0文章
122瀏覽量
15766 -
OpenHarmony
+關注
關注
25文章
3729瀏覽量
16405
發布評論請先 登錄
相關推薦
迅為RK3568開發板篇OpenHarmony配置HDF驅動控制LED-配置創建私有配置文件
迅為RK3568開發板篇OpenHarmony配置HDF驅動控制LED-修改HCS硬件配置
如何使用PWM控制電機
PWM驅動電阻太小會怎么樣
PWM驅動電機發熱的原因
pwm驅動電機對頻率有啥要求
pwm變換器驅動電路的特點有哪些
PWM驅動電機的基本原理和應用優勢
鴻蒙開發:【OpenHarmony 4.0 Release指導】

鴻蒙OpenHarmony【LED外設控制】 (基于Hi3861開發板)
鴻蒙開發實戰:【Hdf Framework】
帶PWM亮度控制的白色LED驅動器TPS6116xA數據表

pwm驅動的電機恒流工作原理圖





 工商網監
工商網監
評論