 ROS中節點管理器master是如何被啟動的
ROS中節點管理器master是如何被啟動的
我們來看看節點管理器master是如何被啟動的,再回到parent.pystart()函數,如下。
我們發現它啟動了XMLRPC服務器后,接下來就調用了_init_runner()函數。
def start(self, auto_terminate=True):
self.logger.info("starting roslaunch parent run")
# load config, start XMLRPC servers and process monitor
try:
self._start_infrastructure()
except:
self._stop_infrastructure()
# Initialize the actual runner.
self._init_runner()
# Start the launch
self.runner.launch()
init_runner()函數實例化了ROSLaunchRunner類,這個類的定義在launch.py里。
def _init_runner(self):
self.runner = roslaunch.launch.ROSLaunchRunner(self.run_id, self.config, server_uri=self.server.uri, ...)
實例化完成后,parent.pystart()函數就調用了它的launch()函數。
我們打開launch.py文件,找到launch()函數,發現它又調用了自己類中的_setup()函數,而_setup()函數又調用了_launch_master()函數。
看名字就能猜出來,_launch_master()函數肯定是啟動節點管理器master的,它調用了create_master_process函數,這個函數在nodeprocess.py里。
所以我們打開nodeprocess.py,create_master_process函數使用了LocalProcess類。這個類繼承自Process類。nodeprocess.py文件引用了python中用于創建新的進程的subprocess模塊。
create_master_process函數實例化LocalProcess類用的是’rosmaster’,即ros_comm-noetic-develtoolsrosmaster中的包。
main.py文件中的rosmaster_main函數使用了master.py中的Master類。
Master類中又用到了master_api.py中的ROSMasterHandler類,這個類包含所有的XMLRPC服務器接收的遠程調用,一共24個,如下。
shutdown(self, caller_id, msg='')
getUri(self, caller_id)
getPid(self, caller_id)
deleteParam(self, caller_id, key)
setParam(self, caller_id, key, value)
getParam(self, caller_id, key)
searchParam(self, caller_id, key)
subscribeParam(self, caller_id, caller_api, key)
unsubscribeParam(self, caller_id, caller_api, key)
hasParam(self, caller_id, key)
getParamNames(self, caller_id)
param_update_task(self, caller_id, caller_api, param_key, param_value)
_notify_topic_subscribers(self, topic, pub_uris, sub_uris)
registerService(self, caller_id, service, service_api, caller_api)
lookupService(self, caller_id, service)
unregisterService(self, caller_id, service, service_api)
registerSubscriber(self, caller_id, topic, topic_type, caller_api)
unregisterSubscriber(self, caller_id, topic, caller_api)
registerPublisher(self, caller_id, topic, topic_type, caller_api)
unregisterPublisher(self, caller_id, topic, caller_api)
lookupNode(self, caller_id, node_name)
getPublishedTopics(self, caller_id, subgraph)
getTopicTypes(self, caller_id)
getSystemState(self, caller_id)
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
管理器
+關注
關注
0文章
246瀏覽量
18557 -
MASTER
+關注
關注
0文章
104瀏覽量
11298 -
ROS
+關注
關注
1文章
278瀏覽量
17037
發布評論請先 登錄
相關推薦
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
SD啟動卡插至評估板Micro SD卡槽。亦可通過SD升級卡或USB固化方式將系統固化至eMMC。
基于Python語言的通信演示
案例功能:基于Python語言,啟動ROS節點發
發表于 07-09 11:38
問GPIB卡安裝正確,為什么在資源管理器中沒有板卡GPIB0?
問GPIB卡安裝正確,為什么在資源管理器中沒有板卡GPIB0?本人已利用GPIB節點和visa函數可以與儀器通信,但在資源管理器中就是沒有GPIB的
發表于 02-20 20:19
從終端啟動許可證管理器
你好,目前我正試圖直接從終端啟動xilinx許可證管理器。我知道您可以通過在終端內運行命令“ise”來啟動ISE。是否也可以這樣啟動許可證管理器
發表于 12-11 11:18
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
產工業核心板,主頻高達2.0GHz。核心板CPU、ROM、RAM、電源、晶振、連接器等所有器件均采用國產工業級方案,國產化率100%,并提供國產化率認證報告。
我司RK3568J平臺提供的ROS系統啟動
發表于 11-30 16:01
Protel DXP設計管理器
protel DXP的所有電路設計工作都必須在DesignExplorer(設計管理器)中進行,同時設計管理器也是ProtelDXP啟動后的主工作界面。設計管理器具有友好的人機界面,而
發表于 06-01 08:39
?0次下載
Windows XP系統任務管理器幾個另類用法
Windows XP系統任務管理器幾個另類用法
Windows任務管理器可以用來察看當前運行的程序、啟動的進程、CPU及內存使用情況等信息,這為
發表于 02-23 13:55
?969次閱讀
數據庫的項目管理器是什么?項目管理器詳細資料總結
項目管理器是VFP集成開發環境中的一個重要組成部分。項目是文件、數據、文檔和對象的集合,項目管理器通過項目文件(.PJX和.PJT)對項目進行管理。VFP所有
發表于 09-18 17:43
?5次下載
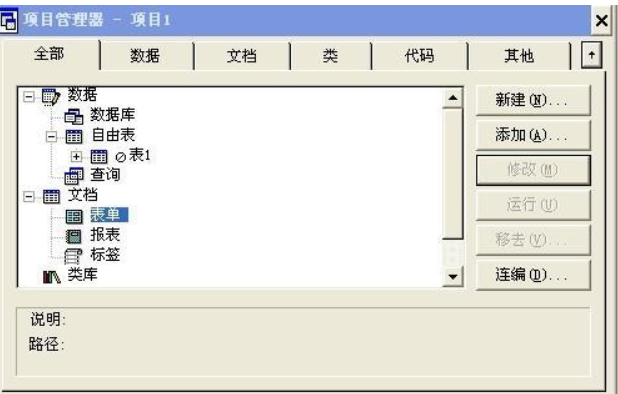
項目管理器及其操作的詳細資料說明
“項目管理器”的啟動、功能、組成、定制以及操作,“項目管理器”包括6個文件選項卡,其中“全部”文件選項卡中,將顯示應用的所有文件對象大類,即“數據”、“文檔”、“類庫”、“代碼”和“其
發表于 03-12 14:27
?16次下載
ROS是如何設計的 ROS客戶端庫
為什么需要客戶端。 原因是,節點與主節點master之間的關系是client/server,這時每個節點都是一個客戶端(client),而maste
ros的基本概念是什么
基本概念: ROS是一個用于在不同進程間匿名的發布、訂閱、傳遞信息的中間件。 ROS2系統的核心部分是ROS網絡(ROS Graph)。 ROS





 工商網監
工商網監
評論