

作者:Ole Dreessen
人工智能應(yīng)用需要大量的能源消耗,通常以服務(wù)器群或昂貴的現(xiàn)場可編程門陣列(FPGA)的形式出現(xiàn)。挑戰(zhàn)在于提高計算能力,同時保持較低的能耗和成本。現(xiàn)在,人工智能應(yīng)用正在看到強大的智能邊緣計算所帶來的巨大轉(zhuǎn)變。與傳統(tǒng)的基于固件的計算相比,基于硬件的卷積神經(jīng)網(wǎng)絡(luò)加速以其驚人的速度和功能開創(chuàng)了計算性能的新時代。通過使傳感器節(jié)點能夠做出自己的決策,智能邊緣技術(shù)大大降低了 5G 和 Wi-Fi 網(wǎng)絡(luò)的數(shù)據(jù)傳輸速率。這為新興技術(shù)和獨特的應(yīng)用提供了動力,這在以前是不可能的。例如,遠程位置的煙霧/火災(zāi)探測器或傳感器級別的環(huán)境數(shù)據(jù)分析成為現(xiàn)實 - 所有這些都在電池電源上使用多年。為了研究這些功能是如何實現(xiàn)的,本文探討了帶有專用AI微控制器的CNN的硬件轉(zhuǎn)換。
具有超低功耗卷積神經(jīng)網(wǎng)絡(luò)加速器的人工智能微控制器
MAX78000是一款具有超低功耗CNN加速器的AI微控制器,這是一種先進的片上系統(tǒng)。它支持超低功耗的神經(jīng)網(wǎng)絡(luò),適用于資源受限的邊緣設(shè)備或物聯(lián)網(wǎng)應(yīng)用。此類應(yīng)用包括對象檢測和分類、音頻處理、聲音分類、噪聲消除、面部識別、心率/健康信號分析的時間序列數(shù)據(jù)處理、多傳感器分析和預(yù)測性維護。
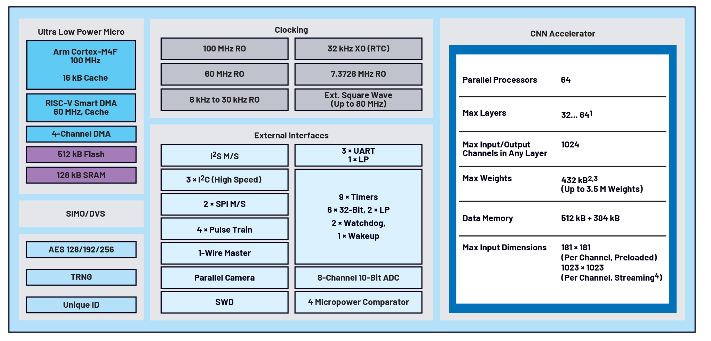
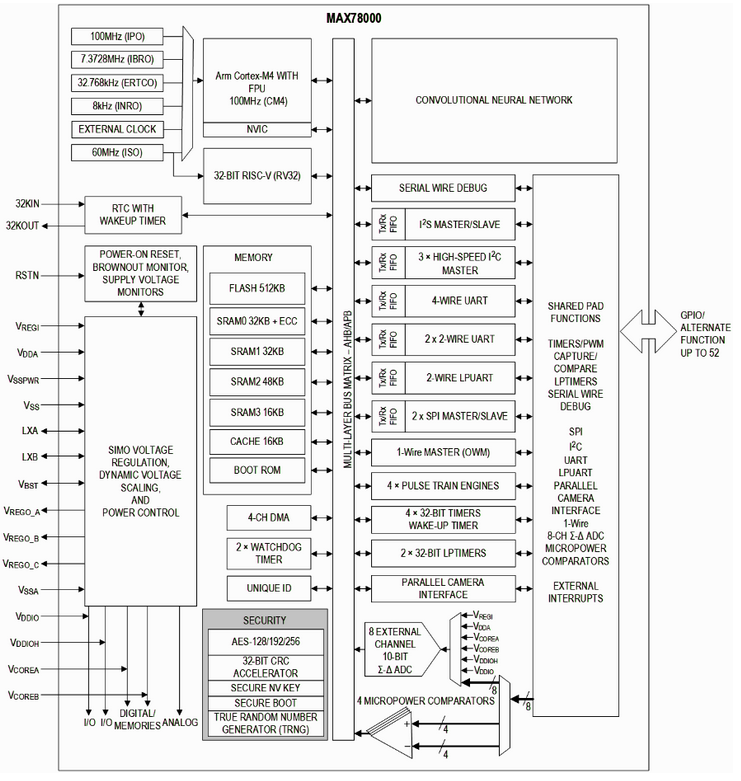
圖1顯示了MAX78000的框圖,該由帶有浮點單元的Arm Cortex-M100F內(nèi)核供電至4 MHz。為了給應(yīng)用提供足夠的存儲器資源,此版本的微控制器配備了512 kB閃存和128 kBSRAM。包括多個外部接口,如I2C、SPI和UART,以及I2S,這對于音頻應(yīng)用非常重要。此外,還有一個集成的60 MHz RISC-V內(nèi)核。RISC-V將數(shù)據(jù)從/復(fù)制到各個外設(shè)模塊和存儲器(閃存和SRAM),使其成為智能直接存儲器訪問(DMA)引擎。RISC-V內(nèi)核預(yù)處理AI加速器的傳感器數(shù)據(jù),因此Arm內(nèi)核在此期間可以處于深度睡眠模式。如有必要,推理結(jié)果可以通過中斷觸發(fā) Arm 內(nèi)核,然后 Arm CPU 在主應(yīng)用程序中執(zhí)行操作,無線傳遞傳感器數(shù)據(jù)或通知用戶。??
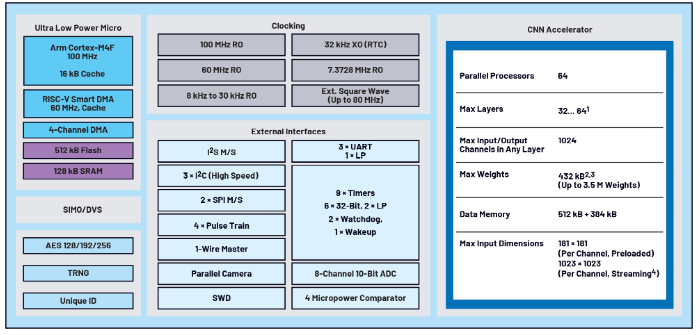
圖 1。MAX78000模塊原理圖。
用于卷積神經(jīng)網(wǎng)絡(luò)推理的硬件加速器單元是MAX7800x系列微控制器的一個顯著特點,使其有別于標準微控制器架構(gòu)和外設(shè)。該硬件加速器可以支持完整的CNN模型架構(gòu)以及所有必需的參數(shù)(權(quán)重和偏差)。CNN 加速器配備 64 個并行處理器和一個集成存儲器,其中 442 kB 用于存儲參數(shù),896 kB 用于輸入數(shù)據(jù)。由于模型和參數(shù)存儲在SRAM存儲器中,因此可以通過固件進行調(diào)整,并且可以實時調(diào)整網(wǎng)絡(luò)。根據(jù)模型中使用的是 1 位、2 位、4 位還是 8 位權(quán)重,此內(nèi)存足以容納多達 3 萬個參數(shù)。由于存儲器功能是加速器的一個組成部分,因此不必在每次連續(xù)的數(shù)學(xué)運算中通過微控制器總線結(jié)構(gòu)獲取參數(shù)。由于高延遲和高功耗,此活動的成本很高。神經(jīng)網(wǎng)絡(luò)加速器可以支持 5 或 32 層,具體取決于池化函數(shù)。每層可編程圖像輸入/輸出大小高達 64 × 1024 像素。
CNN 硬件轉(zhuǎn)換:能耗和推理速度比較
CNN推理是一項復(fù)雜的計算任務(wù),由矩陣形式的大型線性方程組成。利用 Arm Cortex-M4F 微控制器的強大功能,可以在嵌入式系統(tǒng)的固件上進行 CNN 推理;但是,有一些缺點需要考慮。在微控制器上運行基于固件的推理時,需要從內(nèi)存中檢索計算所需的命令以及相關(guān)的參數(shù)數(shù)據(jù),然后才能寫回中間結(jié)果,因此會消耗大量精力和時間。
表 1 比較了使用三種不同解決方案的 CNN 推理速度和能耗。該示例模型是使用手寫數(shù)字識別訓(xùn)練集MNIST開發(fā)的,該訓(xùn)練集對視覺輸入數(shù)據(jù)中的數(shù)字和字母進行分類,以得出準確的輸出結(jié)果。測量每種處理器類型所需的推理時間,以確定能耗和速度之間的差異。
表 1.利用MNIST數(shù)據(jù)集進行手寫數(shù)字識別的三種不同場景
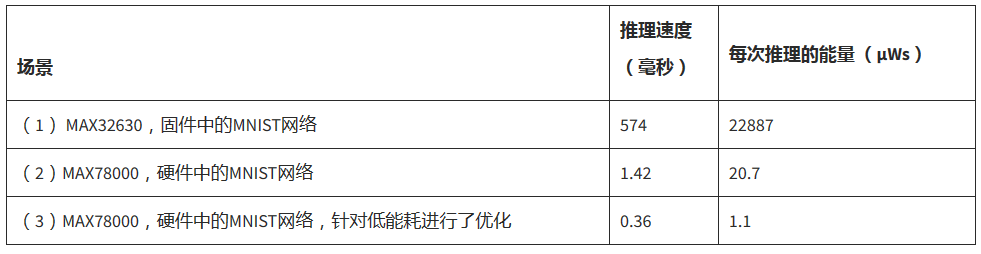
在第一個場景中,集成到MAX4中的Arm Cortex-M32630F處理器(運行頻率為96 MHz)用于計算推理。在第二種情況下,為了處理計算,使用了MAX78000基于硬件的CNN加速器。當使用帶有基于硬件的加速器 (MAX400) 的微控制器時,推理速度(即在網(wǎng)絡(luò)輸入處呈現(xiàn)視覺數(shù)據(jù)與結(jié)果輸出之間的時間)會降低 78000 倍。此外,每次推理所需的能量要低 1100 倍。在第三個比較中,MNIST網(wǎng)絡(luò)針對每次推理的最小能耗進行了優(yōu)化。在這種情況下,結(jié)果的準確性從 99.6% 下降到 95.6%。但是,網(wǎng)絡(luò)速度要快得多,每次推理只需要 0.36 毫秒。每次推理的能耗降至僅 1.1 μW。在使用兩節(jié)AA堿性電池(總能量為6 Wh)的應(yīng)用中,可以進行《》萬次推理(省略電路其余部分消耗的功率)。
這些數(shù)據(jù)說明了硬件加速計算的強大功能。硬件加速計算對于無法利用連接或連續(xù)電源的應(yīng)用程序來說是一種寶貴的工具。該MAX78000支持邊緣處理,而無需大量能源、寬帶互聯(lián)網(wǎng)接入或延長推理時間。
MAX78000 AI 微控制器的示例用例
該MAX78000支持多種潛在應(yīng)用程序,但讓我們以以下用例為例。要求是設(shè)計一個電池供電的攝像頭,檢測貓何時在其圖像傳感器的視野中,從而能夠通過貓門的數(shù)字輸出進入房屋。
圖2描述了這種設(shè)計的示例框圖。在這種情況下,RISC-V內(nèi)核定期打開圖像傳感器,并將圖像數(shù)據(jù)加載到由MAX78000供電的CNN中。如果貓識別的概率高于先前定義的閾值,則啟用貓門。然后,系統(tǒng)將返回到待機模式。
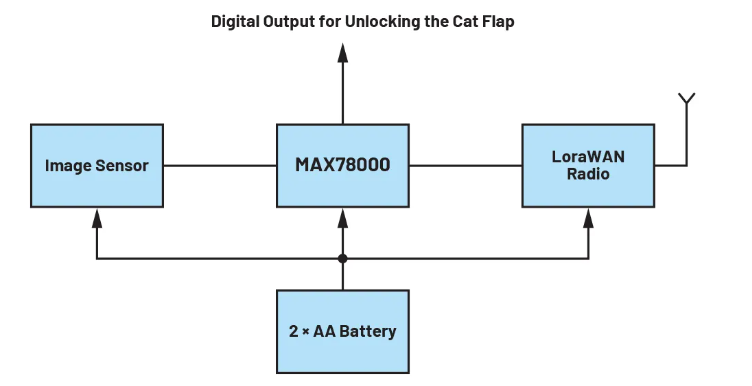
圖2.智能寵物門的框圖。
開發(fā)環(huán)境和評估套件
開發(fā)邊緣 AI 應(yīng)用程序的過程可以分為以下幾個階段:
第 1 階段:人工智能——網(wǎng)絡(luò)的定義、訓(xùn)練和量化
第 2 階段:Arm 固件 – 將第 1 階段生成的網(wǎng)絡(luò)和參數(shù)包含在 C/C++ 應(yīng)用程序中,并創(chuàng)建和測試應(yīng)用程序固件
開發(fā)過程的第一部分涉及 AI 模型的建模、訓(xùn)練和評估。在這個階段,開發(fā)人員可以利用開源工具,如PyTorch和TensorFlow。GitHub 存儲庫提供了全面的資源,幫助用戶規(guī)劃他們使用 PyTorch 開發(fā)環(huán)境構(gòu)建和訓(xùn)練 AI 網(wǎng)絡(luò)的旅程,同時考慮MAX78000的硬件規(guī)格。存儲庫中包含一些簡單的AI網(wǎng)絡(luò)和應(yīng)用程序,例如面部識別(Face ID)。
圖 3 顯示了 PyTorch 中典型的 AI 開發(fā)過程。首先,對網(wǎng)絡(luò)進行建模。需要注意的是,并非所有MAX7800x微控制器的硬件都支持PyTorch環(huán)境中的所有數(shù)據(jù)操作。因此,ADI公司提供的文件 ai8x.py 必須首先包含在項目中。此文件包含使用該MAX78000所需的 PyTorch 模塊和運算符。基于此設(shè)置,可以構(gòu)建網(wǎng)絡(luò),然后使用訓(xùn)練數(shù)據(jù)進行訓(xùn)練、評估和量化。此步驟的結(jié)果是一個檢查點文件,其中包含最終合成過程的輸入數(shù)據(jù)。在最后一個流程步驟中,網(wǎng)絡(luò)及其參數(shù)被轉(zhuǎn)換為適合硬件CNN加速器的形式。這里應(yīng)該提到的是,網(wǎng)絡(luò)培訓(xùn)可以在任何PC(筆記本電腦,服務(wù)器等)上完成。但是,如果沒有 CUDA 顯卡支持,這可能需要大量時間——即使對于小型網(wǎng)絡(luò),幾天甚至幾周也是完全現(xiàn)實的。
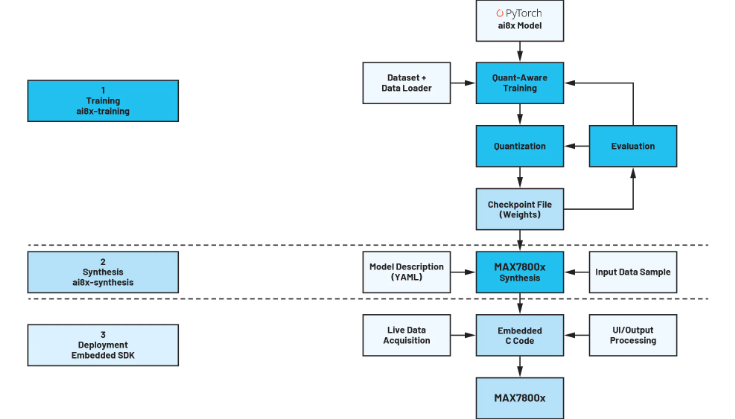
圖 3。人工智能開發(fā)過程。
在開發(fā)過程的第 2 階段,使用將數(shù)據(jù)寫入 CNN 加速器并讀取結(jié)果的機制創(chuàng)建應(yīng)用程序固件。在第一階段創(chuàng)建的文件通過 #include 指令集成到 C/C++ 項目中。Eclipse IDE和GNU工具鏈等開源工具也用于微控制器的開發(fā)環(huán)境。ADI提供軟件開發(fā)套件(Maxim Micros SDK (Windows))作為安裝程序,其中包含所有必要的組件和配置。軟件開發(fā)套件還包含外設(shè)驅(qū)動程序以及示例和說明,以簡化開發(fā)應(yīng)用程序的過程。
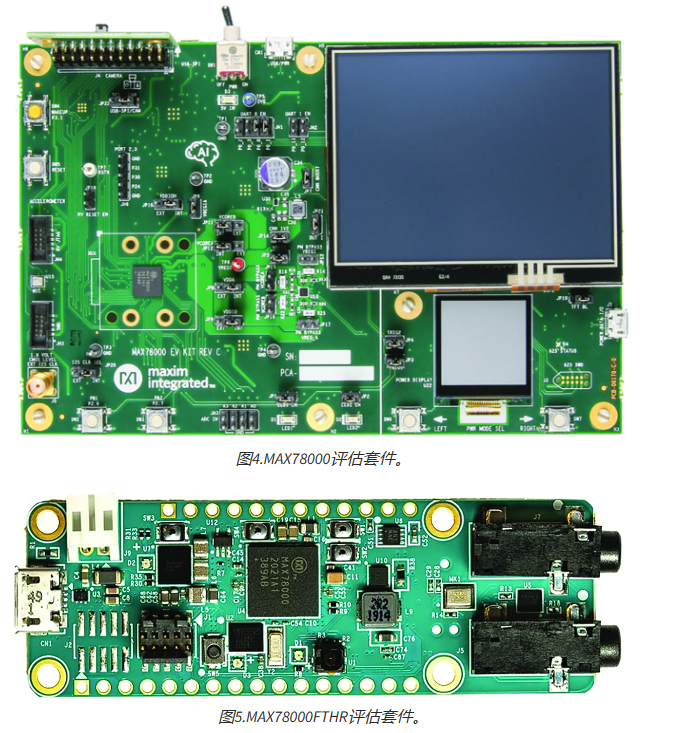
一旦項目被編譯和鏈接而沒有任何錯誤,就可以在目標硬件上對其進行評估。為此,ADI開發(fā)了兩種不同的硬件平臺。圖 4 顯示了MAX78000EVKIT,圖 5 顯示了MAX78000FTHR,這是一個稍小的羽毛外形板。每塊板都配有一個VGA攝像頭和一個麥克風(fēng)。
結(jié)論
以前,人工智能應(yīng)用需要服務(wù)器場或昂貴的FPGA形式的大量能源消耗。現(xiàn)在,借助帶有專用 CNN 加速器的 MAX78000 系列微控制器,可以使用單塊電池長時間為 AI 應(yīng)用供電。能源效率和功耗的這一突破使邊緣 AI 比以往任何時候都更容易獲得,并釋放了以前不可能實現(xiàn)的令人興奮的全新邊緣 AI 應(yīng)用的潛力。
編輯:黃飛
-
微控制器
+關(guān)注
關(guān)注
48文章
7831瀏覽量
153256 -
FPGA
+關(guān)注
關(guān)注
1640文章
21899瀏覽量
611386 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4795瀏覽量
102134 -
AI
+關(guān)注
關(guān)注
87文章
33377瀏覽量
273873 -
cnn
+關(guān)注
關(guān)注
3文章
353瀏覽量
22558
發(fā)布評論請先 登錄
相關(guān)推薦
深度探索AI微控制器對CNN的硬件轉(zhuǎn)換方案

什么是微控制器
微控制器MCU是什么
AT32微控制器硬件設(shè)計指南及抗EMC設(shè)計要點
微控制器硬件抗干擾技術(shù)
什么是微控制器?如何編程微控制器?
微控制器中各式各樣的編程語言
微控制器布局
如何采用帶專用CNN加速器的AI微控制器實現(xiàn)CNN的硬件轉(zhuǎn)換
AT32微控制器硬件設(shè)計指南及抗EMC設(shè)計要點

在軟硬件設(shè)計方面,微控制器的PWM功能有何具體差異?
新唐科技宣布推出基于微控制器的終端AI平臺,加速AI應(yīng)用普及
ADI 新型AI微控制器 # MAX78000 數(shù)據(jù)手冊和芯片介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論