") 復雜BLDC控制帶來更高效電機應用
復雜BLDC控制帶來更高效電機應用
電子發(fā)燒友網(wǎng)報道(文/李寧遠)從簡單的電動工具到復雜的機器人,許多機器設備都使用無刷直流電機BLDC將電能轉(zhuǎn)換為旋轉(zhuǎn)運動。在低能效電機漸漸滿足不了各行各業(yè)需求的今天,高能效的無刷直流電機完成對低能效電機的替代已經(jīng)是大勢所趨。
在高效率、高扭矩、低噪音、長壽命、響應快速等優(yōu)勢的加持下,越來越多電動設備開始向BLDC轉(zhuǎn)變。雖然BLDC有著這么多優(yōu)勢,但實現(xiàn)BLDC的控制是相對較難的。
BLDC控制的實現(xiàn)
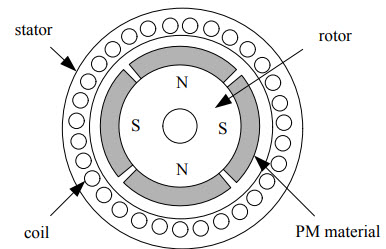
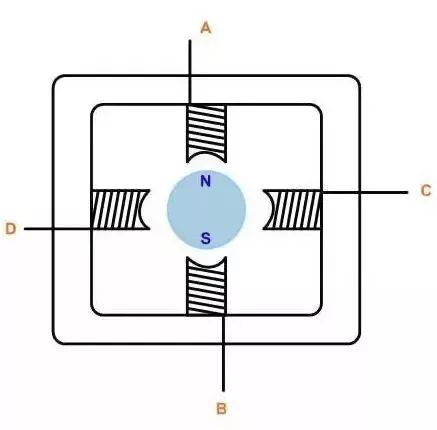
從工作原理上來看,BLDC作為電機,其基本構(gòu)造也是定子加轉(zhuǎn)子,定子是通電的線圈,轉(zhuǎn)子是永磁體。根據(jù)電磁感應原理,只要給定子上的線圈接入適當方向的電流,讓產(chǎn)生的磁極方向與永磁體的磁極對應,就可以旋轉(zhuǎn)起來。也就是說,控制電流的大小和方向,就能控制BLDC轉(zhuǎn)子的旋轉(zhuǎn)。
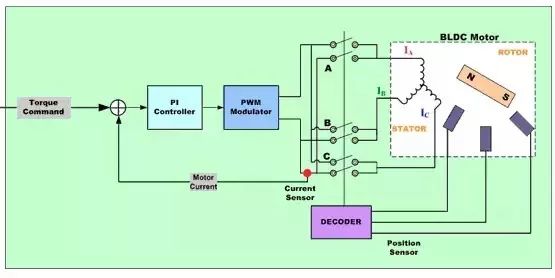
對轉(zhuǎn)子的旋轉(zhuǎn)完成了控制還不夠,因為此時還不知道轉(zhuǎn)子的位置。為了控制BLDC,需要BLDC電機控制要求了解電機進行整流轉(zhuǎn)向的轉(zhuǎn)子位置和機制。對于閉環(huán)速度控制,有兩個附加要求,即對于轉(zhuǎn)子速度或電機電流以及PWM信號進行測量,以控制電機速度以及功率。
如何得知轉(zhuǎn)子當前的位置,分出了有感和無感兩類控制策略。有感控制最常見的是使用霍爾傳感器,給轉(zhuǎn)子位置提供最直接最有效的檢測。不過有感的方案不可避免地會使電機的體積變大,需要的信號引線增多,生產(chǎn)成本增加。
特別是在某些應用中,如果環(huán)境存在偏極端的高溫高壓工況,額外配置的位置傳感器可能會受到影響,進而影響整個電機系統(tǒng)的可靠性,有系統(tǒng)運行失效的風險。
無感的控制雖然則進一步加大了BLDC的控制難度,沒有了額外的傳感器,那么控制算法勢必會更加復雜,同時還需要引入前饋控制、觀測器等概念。但在不需要編碼器等額外的傳感器的情況下完成控制雖說更復雜,但無感控制也帶來了更簡潔的電機結(jié)構(gòu)并且降低了傳感器失效風險。
目前我們常見的BLDC,硬件配置層面絕大多數(shù)控制方式都以六個功率開關(guān)器件構(gòu)成的電子換相電路搭配成全橋,控制和驅(qū)動組合,再加上位置反饋電路和電流采樣電路。軟件層面則是方波、正弦波控制。
六步換相控制與FOC控制
在方波驅(qū)動里,六步換相是使用的非常多的控制手段。六步換相意為在任意時刻三相BLDC只有兩相通電,另一相開路,三相兩兩通電,共有六種組合,以一定的順序每60°變化一次,每360°電周期換相6次,換相發(fā)生在兩個相鄰狀態(tài)的切換瞬間,由開關(guān)管切換完成。以此產(chǎn)生旋轉(zhuǎn)的磁場,拉動永磁體轉(zhuǎn)子隨之轉(zhuǎn)動。
對于有感的控制方案來說,三個位置傳感器每當電機每轉(zhuǎn)過60個電角度,其中一個霍爾傳感器就會改變狀態(tài)。而對于無感的控制來說,是沒有位置傳感器的,那要如何判斷電機轉(zhuǎn)子位置呢?
無感需要依靠反電動勢來確定,此時位置反饋電路被替代為反電動勢過零檢測電路。每當電機發(fā)生換向時,反電動勢的電壓極性發(fā)生變化,即反電動勢經(jīng)過零值。通過識別反電動勢過零點,來識別轉(zhuǎn)速位置換向的過程。不過無感的方式復雜很多,電機轉(zhuǎn)速為零或較低的情況下很難檢測到。
六步換相是非常經(jīng)典的電機控制方案,實現(xiàn)起來也很簡單,不過方波控制存在比較大的轉(zhuǎn)矩脈動,會有比較大的噪音。FOC則是一個復雜且強大的BLDC控制方法,無感FOC則進一步加大了控制難度。
現(xiàn)在FOC、無感FOC功能幾乎已成為BLDC MCU的標配,是體現(xiàn)控制能力的核心競爭力。也有叫做VC的說法,雖然FOC和VC二者概念上是有差異的,但在大多數(shù)場景里,二者指的是同一種控制方法,即通過精確地控制磁場大小和方向?qū)崿F(xiàn)更平穩(wěn)的轉(zhuǎn)矩控制、更小的噪聲、更高的效率以及更高速的動態(tài)響應。
目前FOC正弦波控制已在很多應用上逐步替代傳統(tǒng)的控制方式,尤其是在運動控制行業(yè)中,其高效的特點、準確的特點優(yōu)勢很明顯。FOC全稱磁場定向控制,拆分開來磁場、定向和控制也是該技術(shù)實現(xiàn)的步驟。
首先通過SVPWM合成矢量磁場,再通過各種檢測手段測量轉(zhuǎn)子位置,最后根據(jù)期望的定子磁場矢量對磁場的大小和方向進行準確控制。FOC解決了精確控制的難題,同時FOC在最高轉(zhuǎn)速下正反轉(zhuǎn)切換仍然能夠非常順暢,這些都是其他控制無法實現(xiàn)的獨特優(yōu)勢。
而且雖然絕大多數(shù)應用用開環(huán)控制就能解決,但對于高性能的電機運控應用來說,閉環(huán)控制是必需的。FOC不僅提供了優(yōu)良的速度、轉(zhuǎn)矩輸出性能,還解決了自然坐標系上實現(xiàn)電機速度、電流閉環(huán)負反饋控制難的問題。
無感FOC,現(xiàn)在越來越多BLDC驅(qū)控IC上都能看到它的身影。無感FOC即在不使用額外位置傳感器的情況下實現(xiàn)磁場定向控制。沒有了額外的傳感器,那么控制算法勢必會更加復雜,同時還需要引入前饋控制、觀測器等概念。目前常見的無感FOC會采用反電動勢觀測或者高頻注入來實現(xiàn)無感FOC。
二者各有利弊,各種反電動勢觀測魯棒性強,在電機中高速運行場景里很常見,能非常順暢地提供位置觀測。但電機轉(zhuǎn)速為零或較低的情況下反電動勢太微弱,觀測誤差會增加,大大削弱電機帶載能力。高頻注入現(xiàn)在應用得也越來越多,雖然高頻注入對電機的凸極效應要求非常高,但是高頻注入能帶載起動并突加負載運行。
小結(jié)
總的來看,BLDC的控制雖然在原理上和有刷電機相似,但實現(xiàn)起來卻要難的多,BLDC需要復雜的控制器才能將單個直流電源轉(zhuǎn)換為三相電壓,而有刷電機可以直接通過調(diào)節(jié)直流電壓來控制。而且FOC控制的鋪開,其高效率優(yōu)勢對BLDC驅(qū)控硬件的性能要求提高了不少,成本上會高出不少,同時還需要電機參數(shù)相匹配。不過復雜的控制為電機應用帶來了更高的效率和更精準的控制。
-
BLDC
+關(guān)注
關(guān)注
206文章
802瀏覽量
96915
發(fā)布評論請先 登錄
相關(guān)推薦
BLDC電機控制—梯形反電動勢BLDC電機控制技術(shù)
FOC電機與BLDC電機的比較
使用MSPM0 MCU設計基于梯形的BLDC電機控制器

BLDC電機驅(qū)動電路圖 BLDC電機的工作原理和基本組成
BLDC電機控制算法詳解
BLDC電機與變頻器的區(qū)別
BLDC電機的工作原理與結(jié)構(gòu)
STM32如何詮釋電機控制創(chuàng)新 如何更高效更智能

BLDC電機的工作原理和使用方法
bldc直流無刷電機怎么測量好壞呢
bldc電機工作原理 bldc電機和普通電機區(qū)別
bldc變頻電機是皮帶嗎 bldc電機是皮帶還是直驅(qū)
BLDC電機的矢量控制介紹
BLDC電機的梯形整流換向





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論