") 自動駕駛場景理解模塊
自動駕駛場景理解模塊
場景理解
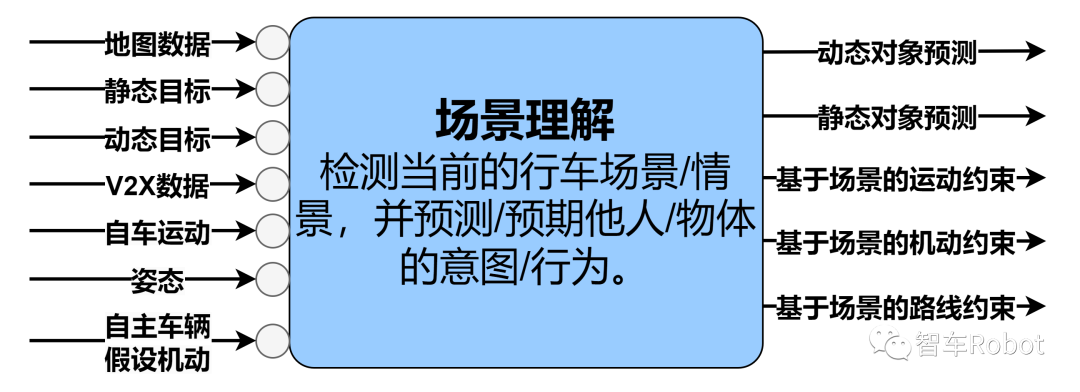
場景理解功能模塊圖場景理解功能模塊體現(xiàn)了負(fù)責(zé)“理解”當(dāng)前駕駛場景的算法。如果自主車輛要在共享的駕駛空間中進(jìn)行智能操縱,則有必要預(yù)測/預(yù)見該空間內(nèi)其他實體的行動。場景或方案理解不僅僅是識別當(dāng)前情況的“狀態(tài)”,還包括對其演變方式的預(yù)測。
此功能模塊中的算法可能能夠模擬多種因果場景,以幫助為自主車輛選擇最佳行動方案。然而,場景理解本身不會對自主車輛應(yīng)該采取的行動做出任何決定,也不會選擇要模擬的行動方案。
場景理解輸入:
?地圖數(shù)據(jù):提供當(dāng)前駕駛場景中基礎(chǔ)設(shè)施的布局。對預(yù)測其他道路使用者/實體的意圖/行為有用。
?靜態(tài)對象:識別駕駛場景中對自主車輛和其他道路實體可能占用的可行駛空間有影響的不可移動對象。靜態(tài)對象可能具有動態(tài)變化的狀態(tài),如交通燈變紅或收費(fèi)站變?yōu)殛P(guān)閉。
?動態(tài)對象:用于預(yù)測當(dāng)前駕駛場景可能如何演變,主要關(guān)注動態(tài)對象的軌跡和狀態(tài)變化。動態(tài)對象的一個預(yù)測示例是車輛剛打開左轉(zhuǎn)燈然后左轉(zhuǎn)。
?V2X數(shù)據(jù):可能提供可以利用的信息來預(yù)見當(dāng)前駕駛場景的演變,如即將改變的交通燈。
?自車運(yùn)動:為預(yù)測引擎提供自主車輛自車運(yùn)動信息。
?姿態(tài):允許預(yù)測引擎在地圖上放置自主車輛。
?自主車輛假設(shè)機(jī)動:為預(yù)測引擎提供自主車輛的假設(shè)機(jī)動。這種機(jī)動可能會引發(fā)其他道路使用者的反應(yīng),需要預(yù)測。例如,改道可能會強(qiáng)迫該車道上迎面而來的另一個道路使用者進(jìn)行危險制動。在行為規(guī)劃做出決定之前,可能會向場景理解功能模塊提交多個自主車輛機(jī)動假設(shè)。
場景理解輸出:?動態(tài)對象預(yù)測:用于安全計劃改變自主車輛當(dāng)前軌跡。
?靜態(tài)對象預(yù)測:用于安全計劃改變自主車輛當(dāng)前軌跡。
?基于場景的運(yùn)動約束:根據(jù)駕駛場景條件約束自主車輛的運(yùn)動。
?基于場景的機(jī)動約束:根據(jù)駕駛場景條件約束自主車輛的計劃機(jī)動。
?基于場景的路線約束:根據(jù)駕駛場景對自主車輛的路線規(guī)劃加以約束。
?場景數(shù)據(jù):提供可以利用的集體駕駛條件視圖,以確保自主車輛在其設(shè)計參數(shù)內(nèi)運(yùn)行。
-
模塊
+關(guān)注
關(guān)注
7文章
2714瀏覽量
47520 -
汽車電子
+關(guān)注
關(guān)注
3026文章
7969瀏覽量
167127 -
車輛
+關(guān)注
關(guān)注
0文章
82瀏覽量
15163 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13835瀏覽量
166516
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論