 以單顆CMOS攝像頭重構三維場景,維悟光子發布單目紅外3D成像模組
以單顆CMOS攝像頭重構三維場景,維悟光子發布單目紅外3D成像模組
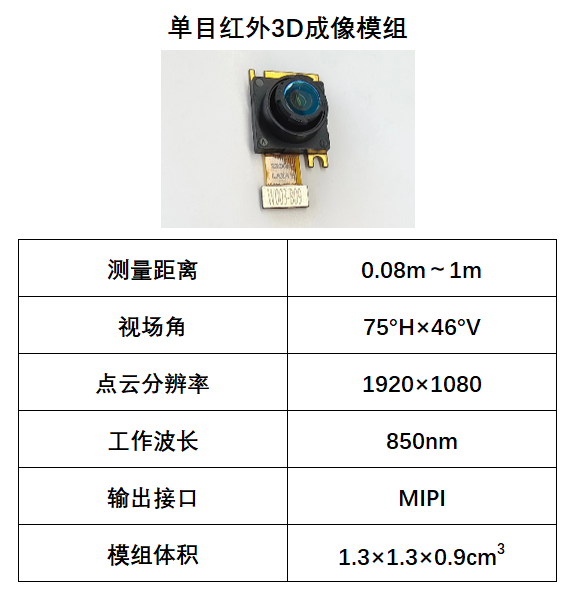
維悟光子近期發布全新單目紅外3D成像模組,現可提供下游用戶進行測試導入。通過結合微納光學元件編碼和人工智能算法解碼,維悟光子單目紅外3D成像模組采用單顆攝像頭,通過單幀拍攝,可同時獲取像素級配準的3D點云和紅外圖像信息,可被應用于機器人、生物識別等廣闊領域。
市場前景與應用
3D視覺是人工智能、通用型機器人感知世界的重要窗口,是數字化、智能化產業轉型升級的物質基礎。目前3D視覺市場采用的方案主要包括飛行時間法(ToF)、結構光和雙目相機。這三種技術路徑需要借助激光器、高速高靈敏度探測器或多個相機,才能實現深度信息的獲取。相對復雜的硬件系統會帶來更高的器件成本、功耗、體積,也會對器件之間的標定和配準有更高的要求,在實際應用場景中存在諸多痛點。
硬件系統的輕量化和降本是3D視覺市場演進的必然趨勢。維悟光子通過底層原理的創新,僅利用單目CMOS相機(最簡單的成像系統)就可以獲取完整的3D信息。本次發布的單目紅外3D成像模組,主要面向機器人避障應用,也能適用于生物識別等需要中近距離3D成像的場景。
相比于ToF、結構光和雙目相機三種傳統技術路徑,維悟光子單目3D相機的獨特優勢有:
更低的器件成本
維悟單目3D相機采用單個CMOS相機獲取深度信息,可以節省激光器、高速高靈敏度探測器和多顆攝像頭導致的高昂器件成本。
更小的體積和重量
維悟單目3D相機利用單顆攝像頭即可獲取3D信息,本次發布的mipi接口模組重量僅約3克,可以輕松適應穿戴式設備、無人機等應用場景。
更低的功耗和發熱量
維悟單目3D相機不需要主動激光照明,單個CMOS相機的功耗和發熱量都較低,能夠更好地適應嵌入式設備、穿戴式設備等低功耗應用場景。
更高的點云分辨率
維悟單目3D相機利用成熟的CMOS傳感器獲取3D信息,能夠以較低的成本獲取高分辨率的原始圖像,且點云數量相較于傳感器分辨率沒有損失,可以輕松獲取稠密點云信息,更好地滿足機器人、自動駕駛等領域的應用需求。
天然的3D點云與紅外圖像配準
維悟單目3D相機通過單幀圖像編碼記錄3D信息,算法解碼后的3D點云和紅外圖像可以天然實現自配準,避免了額外的配準操作帶來的算力負擔和誤差。
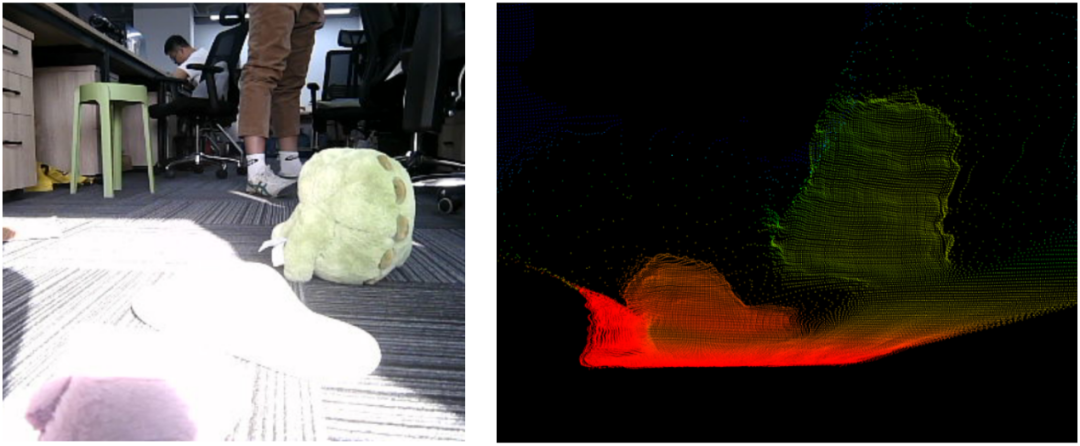
下圖是在機器人避障場景的實拍效果演示。
點云分辨率可高達1920×1080(可根據應用需求靈活調整)。維悟單目3D相機能夠以更低的成本獲取更高分辨率的點云圖,讓機器人可以“看到”更微小的物體和更準確的輪廓細節,同時可以在強環境光、反光/黑色物體等corner case下穩定輸出正確點云,實現更好的識別和避障效果。

黑色金屬垃圾桶
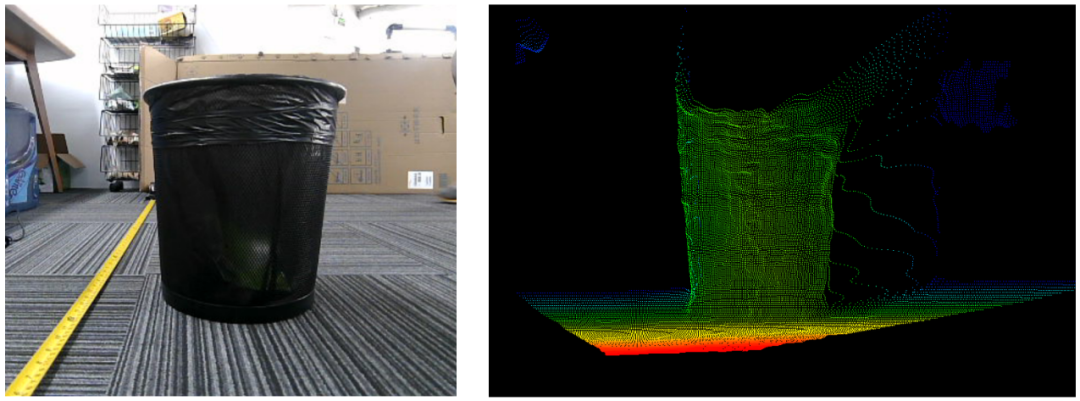
反光地面
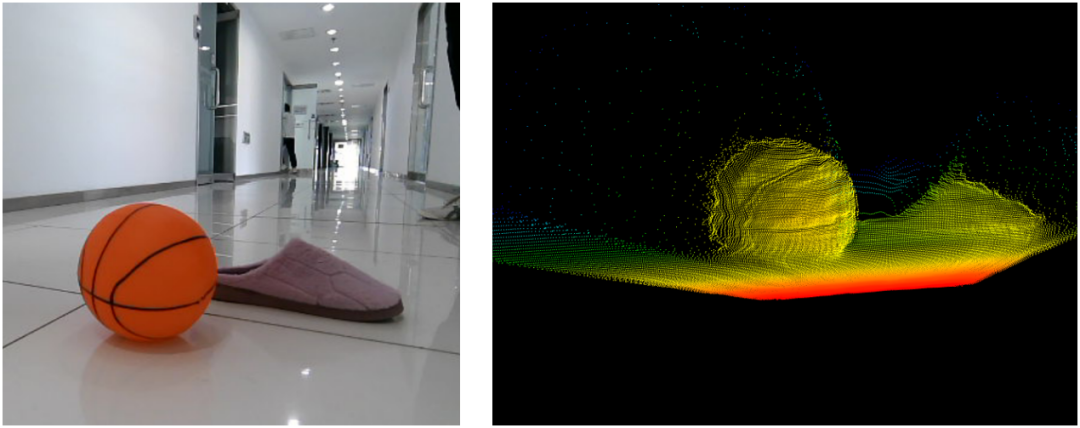
強環境光
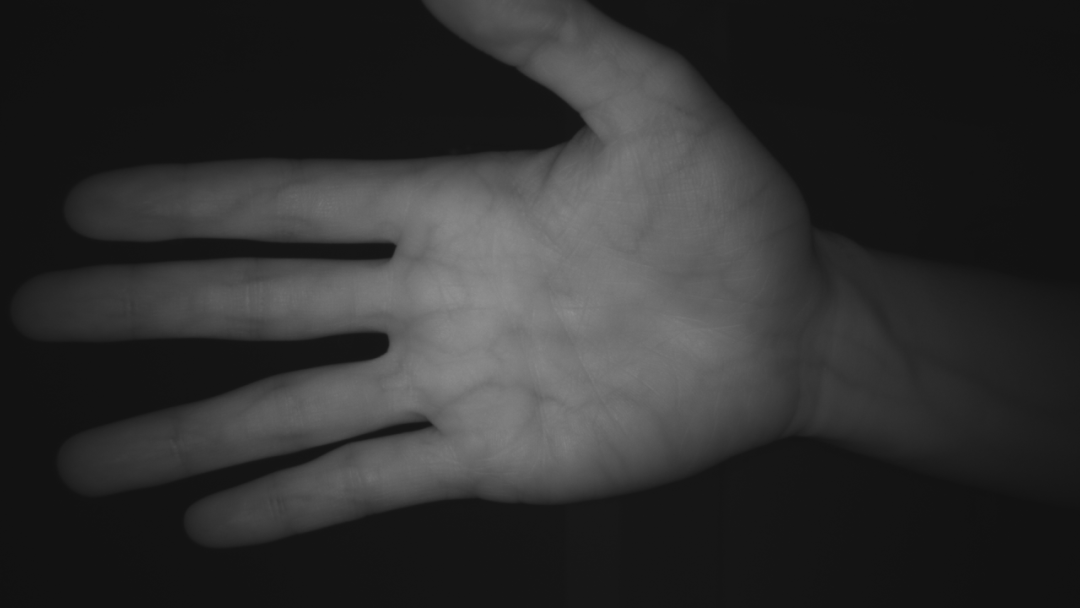
除了3D距離信息,維悟單目3D相機還可以同時輸出高分辨率的紅外灰度圖,例如在生物識別場景中,能夠清晰地呈現掌靜脈、掌紋等微小細節,為多模態生物識別提供更低成本、更低功耗、更小體積的傳感器和解決方案。
維悟單目3D相機作為通用型的3D視覺感知技術,市場應用前景非常廣闊。維悟光子團隊正在基于領先的光學設計和算法能力,開發更大視場角、更大測量范圍的單目紅外3D相機和單目RGB-D相機,致力于為機器人、生物識別、手機/電腦、AR/VR、自動駕駛、工業/醫療檢測等應用場景提供更優性能和更高性價比的3D視覺感知方案。
-
CMOS
+關注
關注
58文章
5718瀏覽量
235504 -
人工智能
+關注
關注
1791文章
47279瀏覽量
238493 -
3D成像
+關注
關注
0文章
98瀏覽量
16066
原文標題:以單顆CMOS攝像頭重構三維場景,維悟光子發布單目紅外3D成像模組
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
最新攝像頭技術給車輛以強大的視覺功能
對3D攝像頭和vcesl產業做一個超詳細的專業科普
以色列3D成像公司Mantis Vision宣布收購AI初創公司BrainVu
人臉識別中雙目、單目、3D結構光攝像頭的區別
專訪模組廠商:人臉識別中單攝像頭和雙攝像頭該如何選型
人臉識別中雙目、單目、3D結構光攝像頭之間的區別
基于全新的單光子成像雷達系統,實現了百公里單光子三維成像
工業工廠3D沉浸式三維數字化管理系統
激光雷達、單目攝像頭、雙目攝像頭原理和優缺點

華東師大實現超靈敏、高分辨、大視場的中紅外單光子三維成像

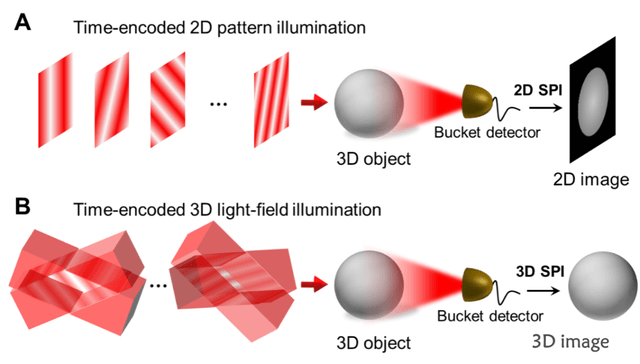
基于空間結構光場照明的三維單像素成像





 工商網監
工商網監
評論