 基于RoboMasterC板的RT-Thread使用分享—PWM使用
基于RoboMasterC板的RT-Thread使用分享—PWM使用
創建工程
在上篇文章中我是使用基于芯片創建的,我原本想著不通過BSP文件在教程中教大家一步一步的通過Kconfig+CubeMX配置出可以驅動整個開發板所有外設的工程的。在社區前輩的提醒后才知道通過基于芯片創建工程是沒有辦法Kconfig配置的。
因此我在之后的教程中我會基于RT-Thread提供的BSP文件stm32f407_robomaster_c來創建工程
但是這個bsp文件暫時還沒有支持板上的所有外設,因此我計劃隨著教程的編寫,我也會幫忙維護這個bsp文件,將我們使用到的外設增加支持。
便于大家后續使用,也滿足我希望告訴大家Kconfig配置的計劃。下圖是目前bsp文件的外設支持情況。

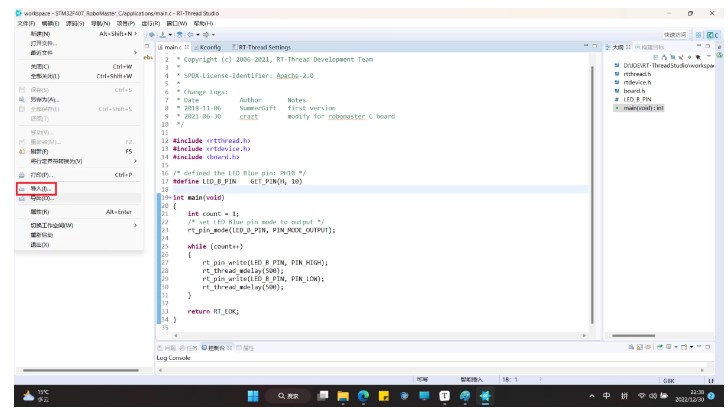
下面就正式開始創建工程。
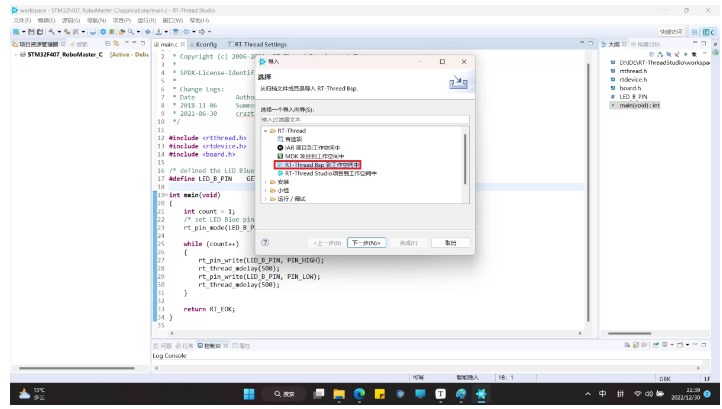
我們這里點擊導入
之后選擇RT-Thread BSP到工作空間中
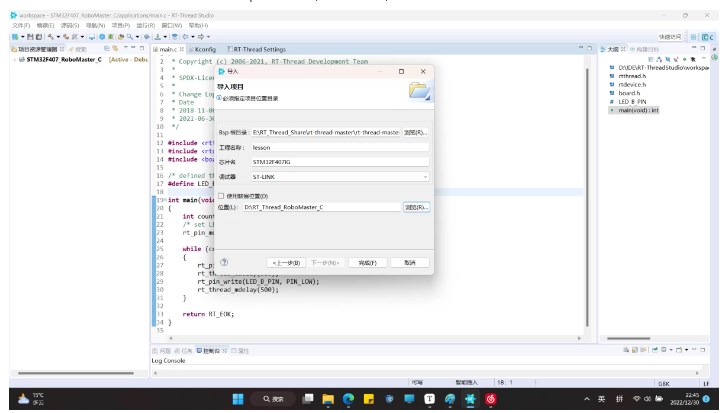
BSP根目錄選擇從Github下載下來的bsp文件路徑,點擊完成,即可創建工程。
點擊編譯,下載后根據BSP文件提供規范,下載后將實現LED燈閃爍的功能。如下圖LED_B閃爍說明工程創建成功。

PWM教程之呼吸燈
CubeMX配置
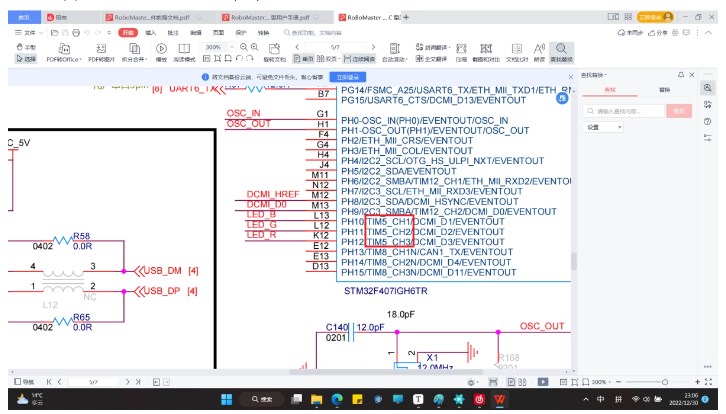
首先我們來看一下開發板原理圖,來看看LED引腳連接著哪一個定時器輸出引腳。
通過原理圖我們可以看到是TIM5的1、2、3通道。
接下來我們就在CubeMX中查看相關引腳的配置。我們需要把TIM5的通道1、2、3設置為PWM模式,并且勾選Internal Clock。
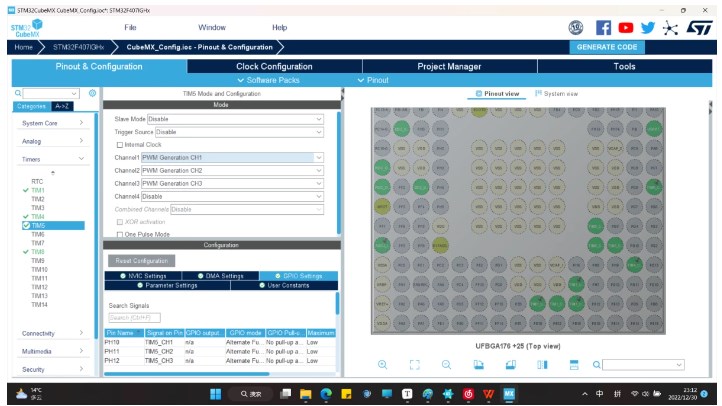
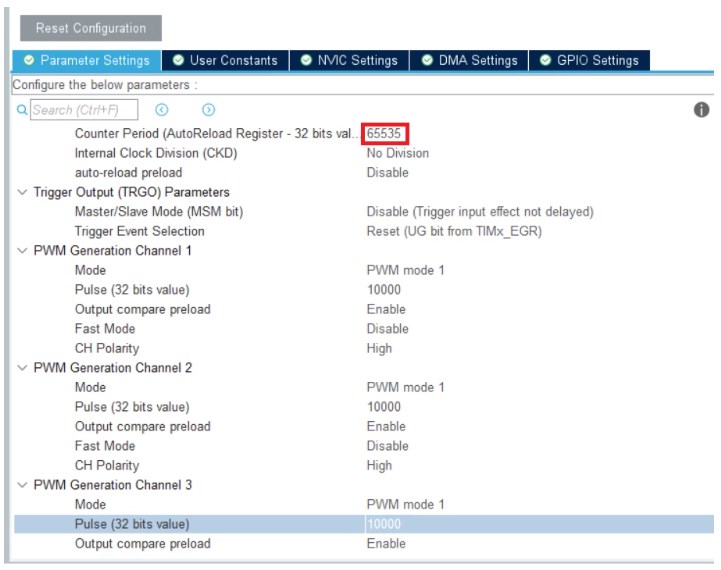
設置重載值為65535。這里設置的原因我會在后面進行頻率計算的時候再說明。
原理講解(計算部分新手可視情況略過)
PWM簡介
PWM即脈沖寬度調制,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術。
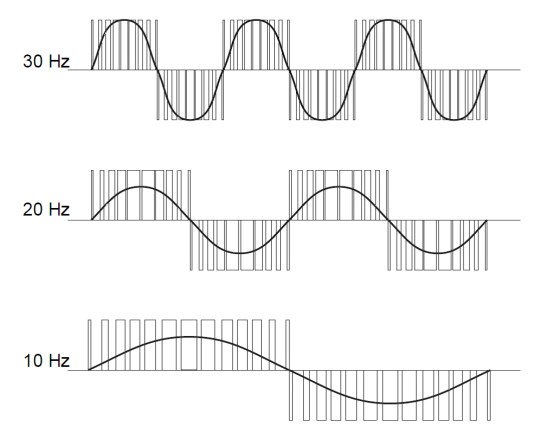
例如上圖中,矩形脈沖是 stm32 輸出的數字信號,當這個信號接到外設上時,效果可以等效為這個正弦波。
一個周期內高電平的持續時間占總周期的比例成為占空比,通過修改占空比,可以改變輸出的等效模擬電壓。例如輸出占空比為 50%,頻率為 10Hz 的脈沖,高電平為 3.3V.則其輸出的模擬效果相當于輸出一個 1.65V 的高電平。此外 PWM 輸出的頻率也會影響最終的 PWM輸出效果,PWM 輸出的頻率越高,最終輸出的“連續性”越好,越接近模擬信號的效果,頻率低則會增強離散性,最終的輸出效果會有比較強的“突變”感。
脈沖調制有兩個重要的參數,第一個就是輸出頻率,頻率越高,則模擬的效果越好。第二個就是占空比。占空比就是改變輸出模擬效果的電壓大小。占空比越大則模擬出的電壓越大。
定時器觸發頻率計算
接下來給大家簡單的講解一下定時器觸發頻率,以及PWM信號的周期和占空比的計算。
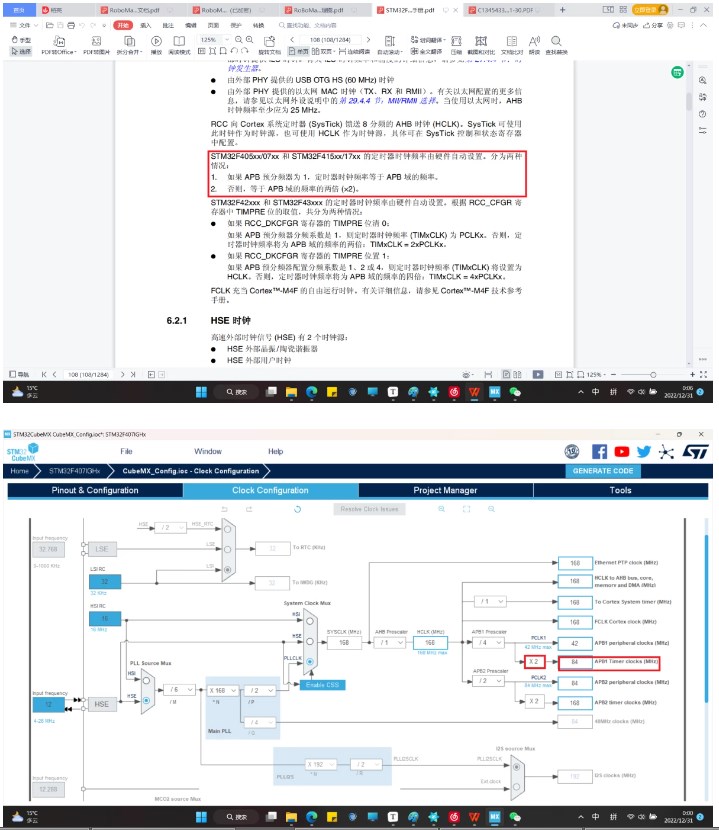
首先是定時器的觸發頻率,這里我們首先需要查看datasheet,看我們的TIM5是掛載在哪一條總線的。這里我們可以看到他是在APB1上的。
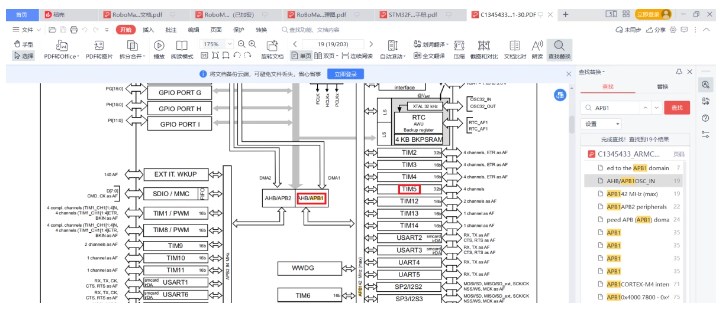
接著我們就要看CubeMX上我們配置的時鐘樹了,在整個時鐘樹的最右端,可以看到 APB1 和 APB2 兩個總線的時鐘頻率設置,其中 APBx peripheral clocks 為掛載在總線上的定時器以外的外設提供時鐘源,APBx timer clocks 為掛載在總線上的定時器提供時鐘源。那么這里我們就可以知道TIM5時鐘源頻率為84MHz,時鐘樹的配置在上篇文章有較為詳細的解釋,這里就不重復了。
這里解釋一下前面的倍頻為何是2,這里可以看到STM32F4xx中文參考手冊,我們這里APB1預分頻器為4,所以定時器時鐘頻率等于APB域的頻率的兩倍,所以倍頻為2
確定時鐘源頻率之后,我們就開始計算定時器觸發頻率,我們前面設置TIM5_PSC為0,因此分頻值為1,因為分頻值為 TIMx_PSC 中的分頻值+1(畢竟分頻不可能為0),所以我們進入的84MHz的頻率信號分頻后還是84MHz。
當 TIMx_CNT 的值增長到 TIMx_ARR 中的值后,就會發生重載,并觸發中斷信號,相當于使用 TIMx_ARR 中的值又進行了一次分頻。因此產生這個中斷信號的頻率應該為84MHz/(ARR+1)(需要加 1 是因為 CNT 是從0開始計數的)。我們上面設置的重載值為65535。
因此定時器觸發頻率為84000000/65536=1281.7Hz,相當于0.78ms會觸發一次中斷信號。這個中斷信號我們還可以用來做一些比如LED燈定時器亮滅等操作,由于篇幅原因中斷相關知識這里就不過多的展開了。這里定時器中斷觸發時間也就是PWM信號周期。
占空比的計算
上文我們講到了PWM一大重要參數就是占空比,而我們設置占空比的重要方式就是設置比較寄存器的值。畢竟我們不能隨便重設重載值,這樣子PWM周期也會發生變化。那么比較值是起到怎樣的作用呢?下圖就可以解釋,下圖為遞增計數模式的示意圖,當定時器以 PWM 模式工作時,會自動將 TIMx_CCRx 的值與 TIMx_CNT(計數寄存器)中的值做比較,當 TIMx_CNT 中的值小于 TIMx_CCRx 的值時,PWM 輸出引腳輸出高電平,大于時則輸出低電平。
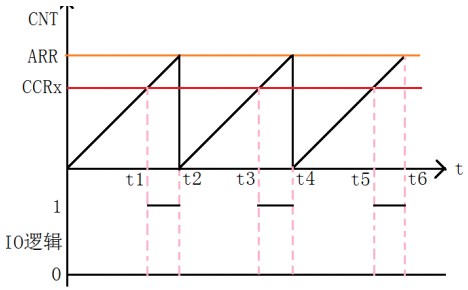
那么我們就可以知道占空比的計算公式為CCRX/ARR*100%,比如重載值為50000,比較寄存器值為25000,那么占空比為50%。
原理部分就到此為止下面就講一下在RT-Thread Studio中的操作。
代碼實踐
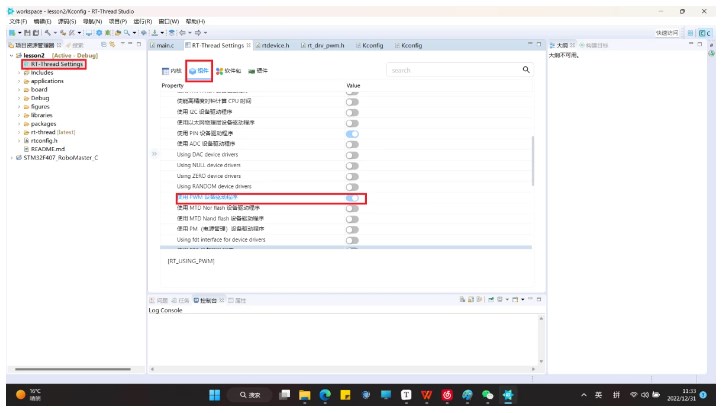
首先我們選擇使用PWM設備驅動程序
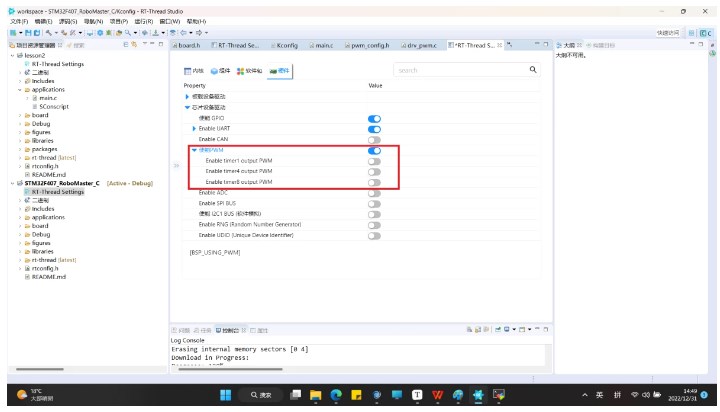
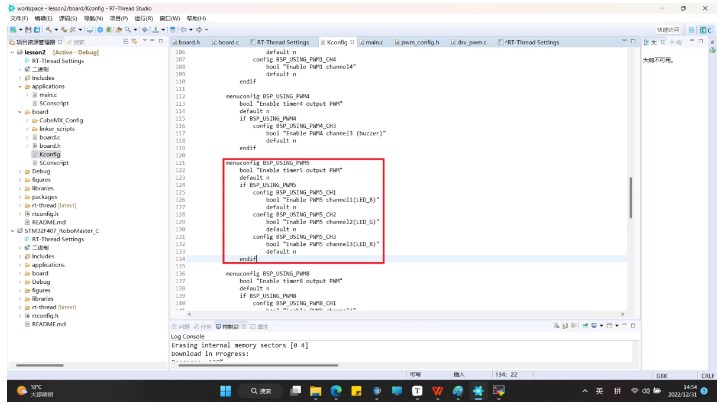
然后我們需要在硬件中選擇使能PWM并且選擇相應的定時器與通道,但是我們發現并沒有我們需要的timer5,這時候我們就需要修改Kconfig文件了。
我們在board/Kconfig中添加如下代碼,這里我們簡單的修改其他PWM配置即可。
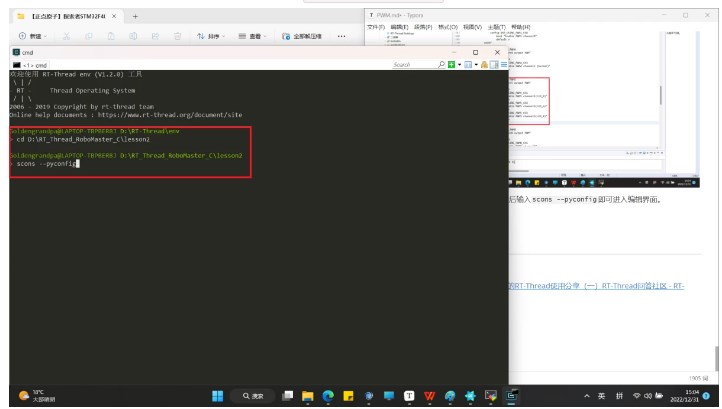
之后我們使用Env工具進入工程所在目錄后輸入scons --pyconfig即可進入編輯界面。
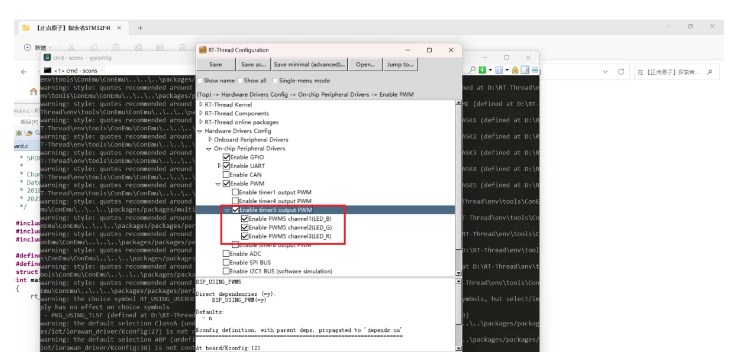
這里我們就可以看到我們在Kconfig中添加的外設,點擊使能,保存修改。
之后輸入scons --target=eclipse重新構建工程,等號后面的參數取決于你使用的IDE,比如我原來使用的是Clion那么就輸入scons --target=cmake,RT-Thread Studio是基于eclipse的所以這里選擇scons --target=eclipse
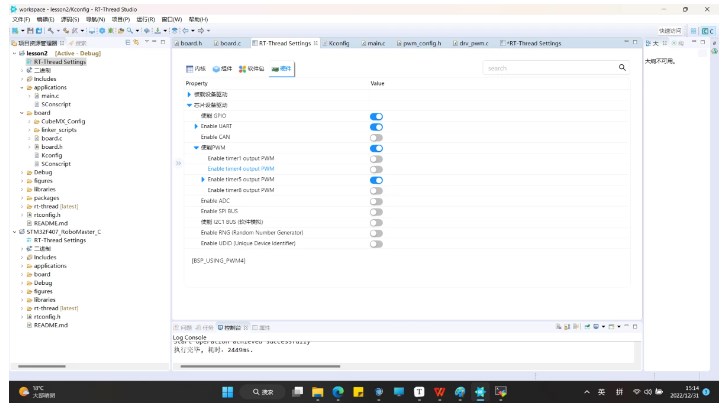
回到RT-Thread Setting可以看到我們增加的外設了。
之后我們就可以在main函數中編寫代碼,實現呼吸燈的功能了。
這里就是簡單的修改了官方的PWM例程代碼
/*
Copyright (c) 2006-2021, RT-Thread Development Team
SPDX-License-Identifier: Apache-2.0
Change Logs:
Date Author Notes
2018-11-06 SummerGift first version
2021-06-30 crazt modify for robomaster C board
/
#include
#include
#include
#define PWM_DEV_NAME "pwm5" / PWM設備名稱 /
#define PWM_DEV_CHANNEL 1 / PWM通道 */
struct rt_device_pwm pwm_dev; / PWM設備句柄 /
int main(void)
{
rt_uint32_t period, pulse, dir;
period = 500000; / 周期為0.5ms,單位為納秒ns /
dir = 1; / PWM脈沖寬度值的增減方向 /
pulse = 0; / PWM脈沖寬度值,單位為納秒ns /
/ 查找設備 */
pwm_dev = (struct rt_device_pwm )rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!n", PWM_DEV_NAME);
return RT_ERROR;
}
/ 設置PWM周期和脈沖寬度默認值 /
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/ 使能設備 /
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
while (1)
{
rt_thread_mdelay(50);
if (dir)
{
pulse += 5000; / 從0值開始每次增加5000ns /
}
else
{
pulse -= 5000; / 從最大值開始每次減少5000ns /
}
if (pulse >= period/2) / 經過測試發現占空比超過50%后對于亮度的影響較小因此就設置死區 /
{
dir = 0;
}
if (0 == pulse)
{
dir = 1;
}
/ 設置PWM周期和脈沖寬度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
}
return RT_EOK;
}
最終燒錄效果為藍燈進行呼吸燈操作。
-
led燈
+關注
關注
22文章
1592瀏覽量
108108 -
定時器
+關注
關注
23文章
3251瀏覽量
115003 -
PWM波
+關注
關注
0文章
99瀏覽量
16899 -
STM32F407
+關注
關注
15文章
188瀏覽量
29514 -
RT-Thread
+關注
關注
31文章
1293瀏覽量
40230
發布評論請先 登錄
相關推薦
基于RoboMasterC板的RT-Thread使用分享—PWM擴展實驗
RT-Thread編程指南
RT-Thread開發,如何有效學習RT-Thread的五個步驟
RT-Thread Studio驅動SD卡

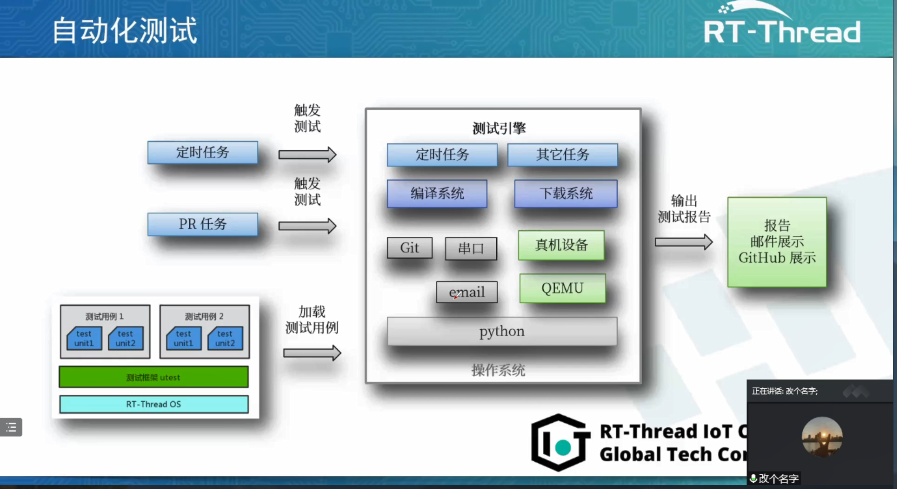
RT-Thread全球技術大會:RT-Thread測試用例集合案例
RT-Thread學習筆記 RT-Thread的架構概述

基于RoboMasterC型開發板的RT-Thread使用分享(一)
基于RoboMasterC型開發板的RT-Thread使用分享(二)
RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南

基于rt-thread的socket通信設計






 工商網監
工商網監
評論