") 步進電機失步的原因和解決辦法
步進電機失步的原因和解決辦法
步進電動機正常工作時,每接收一個控制脈沖就移動一個步距角,即前進一步。若連續(xù)地輸入控制脈沖,電動機就相應地連續(xù)轉動。 步進電動機失步包括丟步和越步。丟步時,轉子前進的步數小于脈沖數;越步時,轉子前進的步數多于脈沖數。一次丟步和越步的步距數等于運行拍數的整數倍。丟步嚴重時,將使轉子停留在一個位置上或圍繞一個位置振動,越步嚴重時,機床將發(fā)生過沖。
失步原因及策略
(1)轉子的加速度慢于步進電動機的旋轉磁場
解釋:轉子的加速度慢于步進電動機的旋轉磁場,即低于換相速度時,步進電動機會產生失步。這是因為輸入電動機的電能不足,在步進電動機中產生的同步力矩無法使轉子速度跟隨定子磁場的旋轉速度,從而引起失步。由于步進電動機的動態(tài)輸出轉矩隨著連續(xù)運行頻率的上升而降低,因而,凡是比該頻率高的工作頻率都將產生丟步。這種失步說明步進電動機的轉矩不足,拖動能力不夠。
解決方法:a、使步進電動機本身產生的電磁轉矩增大。為此可在額定電流范圍內適當加大驅動電流;在高頻范圍轉矩不足時,可適當提高驅動電路的驅動電壓;改用轉矩大的步進電動機等。b、使步進電動機需要克服的轉矩減小。為此可適當降低電動機運行頻率,以便提高電動機的輸出轉矩;設定較長的加速時間,以便轉子獲得足夠的能量。
(2)轉子的平均速度高于定子磁場的平均旋轉速度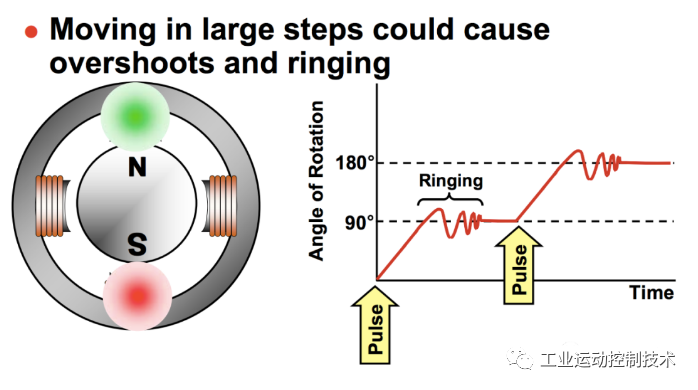
解釋:轉子的平均速度高于定子磁場的平均旋轉速度,這時定子通電勵磁的時間較長,大于轉子步進一步所需的時間,則轉子在步進過程中獲得了過多的能量,使得步進電動機產生的輸出轉矩增大,從而使電動機越步。當用步進電動機驅動那些使負載上、下動作的機構時,更易產生越步現(xiàn)象,這是因為負載向下運動時,電動機所需的轉矩減小。
解決方法:減小步進電動機的驅動電流,以便降低步進電動機的輸出轉矩。
(3)步進電動機及所帶負載存在慣性
解釋: 由于步進電動機自身及所帶負載存在慣性,使得電動機在工作過程中不能立即起動和停止,而是在起動時出現(xiàn)丟步,在停止時發(fā)生越步。
解決方法:通過一個加速和減速過程,即以較低的速度起動,而后逐漸加速到某一速度運行,再逐漸減速直至停止。進行合理、平滑的加減速控制是保證步進驅動系統(tǒng)可靠、高效、精確運行的關鍵。
(4)步進電動機產生共振 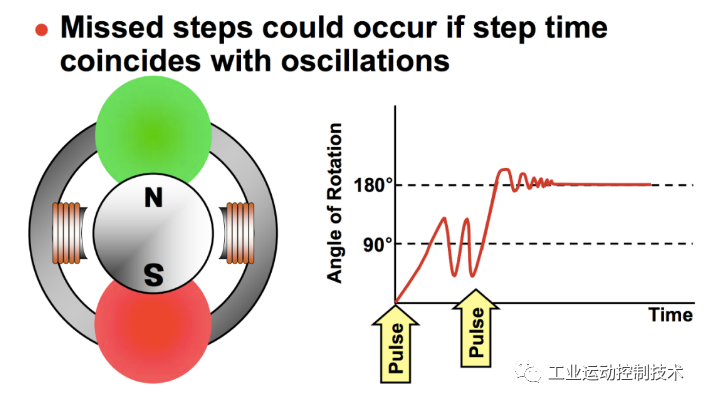 解釋:共振也是引起失步的一個原因。步進電動機處于連續(xù)運行狀態(tài)時,如果控制脈沖的頻率等于步進電動機的固有頻率,將產生共振。在一個控制脈沖周期內,振動得不到充分衰減,下一個脈沖就來到,因而在共振頻率附近動態(tài)誤差最大并會導致步進電動機失步。
解釋:共振也是引起失步的一個原因。步進電動機處于連續(xù)運行狀態(tài)時,如果控制脈沖的頻率等于步進電動機的固有頻率,將產生共振。在一個控制脈沖周期內,振動得不到充分衰減,下一個脈沖就來到,因而在共振頻率附近動態(tài)誤差最大并會導致步進電動機失步。
解決方法:適當減小步進電動機的驅動電流;采用細分驅動方法;采用阻尼方法,包括機械阻尼法。以上方法都能有效消除電動機振蕩,避免失步現(xiàn)象發(fā)生。
(5)改變方向時丟脈沖
解釋:表現(xiàn)為往任何一個方向都準,但一改變方向就累計偏差,并且次數越多偏得越多。
解決方案:一般的步進驅動器對方向和脈沖信號都有一定的要求,如:方向信號在第一個脈沖上升沿或下降沿(不同的驅動器要求不一樣)到來前數微秒被確定,否則會有一個脈沖所運轉的角度與實際需要的轉向相反,最后故障現(xiàn)象表現(xiàn)為越走越偏,細分越小越明顯,解決辦法主要用軟件改變發(fā)脈沖的邏輯或加延時。
(6)軟件缺陷
解釋:控制程序導致失步也不少見,需要檢查控制程序是不是有問題。
-
步進電機
+關注
關注
150文章
3111瀏覽量
147486 -
振動
+關注
關注
0文章
130瀏覽量
20332 -
機床
+關注
關注
1文章
581瀏覽量
30262
發(fā)布評論請先 登錄
相關推薦
常見墊圈故障及解決辦法 防漏墊圈的設計與應用
常見MCU故障及解決辦法
分析波峰焊時產生連錫(短路)的原因以及解決辦法

變頻器常見故障和解決辦法,這一篇就夠了,各大品牌都適用


漏電開關跳閘的原因與解決辦法
SMT貼片加工中出現(xiàn)“立碑”的原因及解決辦法
步進伺服電機出現(xiàn)失步現(xiàn)象的有哪些原因?

步進伺服電機出現(xiàn)失步現(xiàn)象的原因包括哪些?
晶振失效三大原因及解決辦法
大模型訓練loss突刺原因和解決辦法





 工商網監(jiān)
工商網監(jiān)
評論