

通過總線控制伺服電機時,如何進行回零(尋參考點)控制?這里就CANOPEN伺服電機的回零控制方法分享給大家。
設置回零模式
在CANopen DSP402協議中,伺服電機進行回零動作時,其操作模式由6060h確定,當給6060h的值為6時,則將伺服電機切換為回零模式(HOMING MODE)。在回零動作啟動前,可以通過讀取6061h的值,以確認電機模式是否設置成功。
一般伺服電機是可以支持多種回零方式的,例如電機使用的是增量編碼器,那么可以選擇通過C脈沖的回零方式;如果電機使用的是串行編碼器或旋轉變壓器,那么就不能選擇通過C脈沖的回零方式。
回零啟動控制
當回零模式設置完成后,可以通過控制字啟動回零動作。

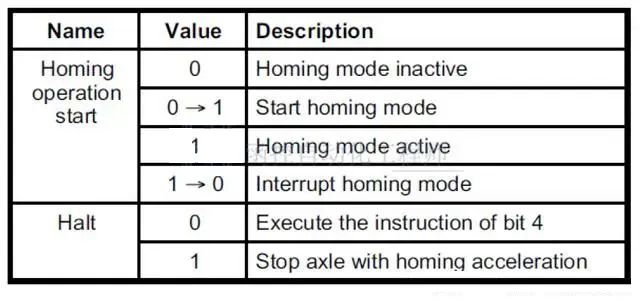
Controlword

與回零動作相關的控制字
在回零模式下,控制字各位的說明:
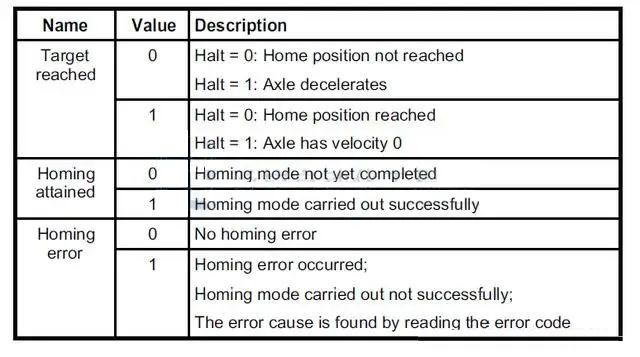
回零模式狀態字:

回零模式下,狀態字各位表示的伺服電機反饋狀態的說明:
與回零動作相關的參數
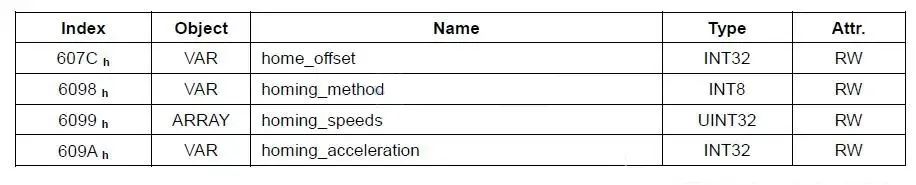
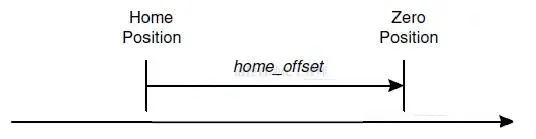
home_offset:參數確定了參考點位置與零位之間的距離。
homing_method:有4種信號可作為回零信號:正限位開關、負限位開關、參考點開關和C脈沖。

homing_speeds:找參考點需要2種速度:找參考點速度和找零位速度。
homing_acceleration:回零期間的加速度和減速度,均是homing_acceleration。
回零的方法
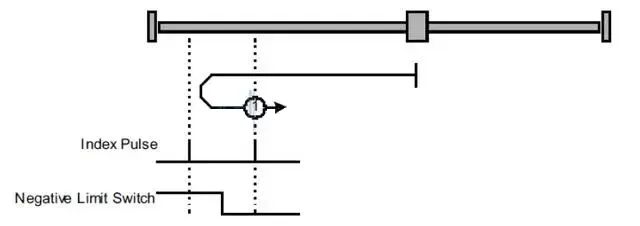
方法1 使用C脈沖和負限位開關
驅動器首先較快的向負方向移動,直到撞到負限位開關(N-OT)才減速停止;然后驅動器慢速返回,尋找目標零位位置。本回零方法的目標零位位置是離開限位開關后編碼器的第一個C脈沖位置。
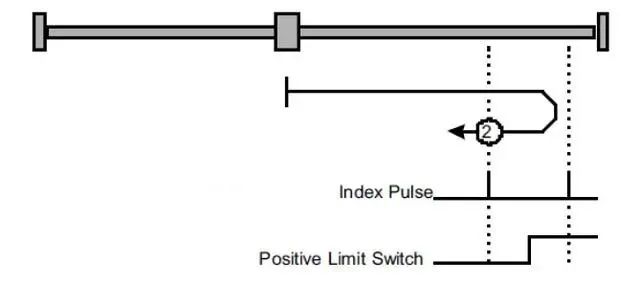
方法2 使用C脈沖和正限位開關
驅動器首先較快的向正方向移動,直到撞到正限位開關(P-OT)才減速停止;然后驅動器慢速返回,尋找目標零位位置。本回零方法的目標零位位置是離開限位開關后編碼器的第一個C脈沖位置。
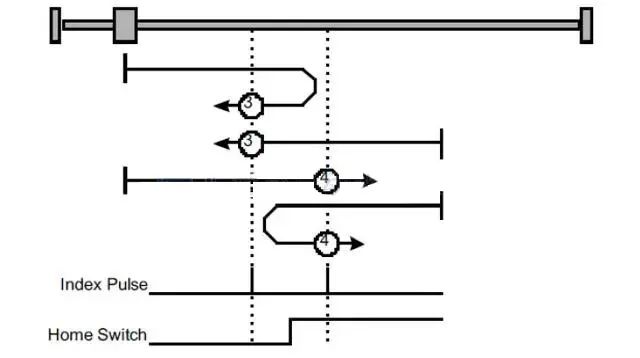
方法3和4 使用C脈沖和參考點開關
驅動器初始方向移動依賴于參考點開關狀態。目標零位位置是參考點開關左邊或右邊的第一個C脈沖位置。
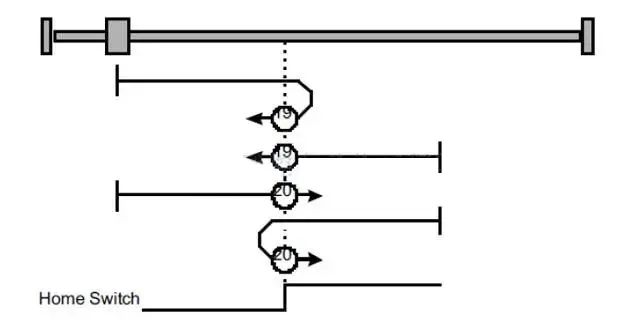
方法17 ~ 20 不使用C脈沖
這4種回零方法分別類似方法1~4,只是目標零位位置不再使用C脈沖,而依賴限位開關或參考點開關的變化。例,如下圖所示方法19和20回零方法分別類似方法3~4。
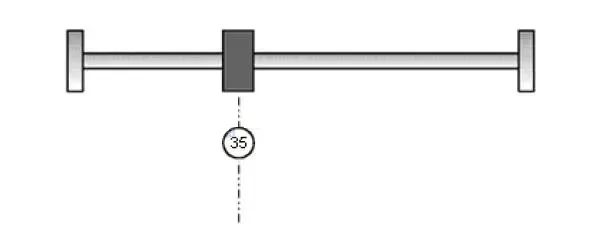
方法35 當前位置為零點
當前位置即為系統零點。
注意:在使用與外部輸入信號有關的回零方式時,啟動回零時電機的旋轉方向與輸入信號的初始狀態有關,必要時可以通過設置將輸入口取反改變其初始狀態。
本文轉自:頭條號函控自動化工程師
審核編輯:湯梓紅
-
編碼器
+關注
關注
45文章
3745瀏覽量
136446 -
總線
+關注
關注
10文章
2935瀏覽量
89106 -
伺服電機
+關注
關注
86文章
2086瀏覽量
58932 -
CANopen
+關注
關注
8文章
292瀏覽量
44335
發布評論請先 登錄
相關推薦









 工商網監
工商網監

評論