") 露天鐵礦無人機光譜探測方法試驗研究
露天鐵礦無人機光譜探測方法試驗研究
引言
鐵礦是支撐國民經(jīng)濟發(fā)展的主要礦產(chǎn)資源之一,是發(fā)展鋼鐵工業(yè)的物質(zhì)基礎(chǔ),由于礦產(chǎn)資源的緊缺性及不可再生性,如何做到合理、高效、精準開采鐵礦資源已成為亟待解決的問題。露天采礦工程是一種大規(guī)模的開挖工程,巖石與礦體分布的確定是露天礦生產(chǎn)規(guī)劃的第一步,因此明確露天采場中礦物與巖石的分布并精確提取該類信息對后續(xù)開采規(guī)劃尤為重要。
但傳統(tǒng)的礦巖識別方法(如礦山采樣、化學化驗等)耗費較大的人力物力且效率不高,已無法滿足露天采場的生產(chǎn)需求。高光譜遙感其光譜分辨率可達到納米級,進而能夠捕捉到不同巖石與礦物的診斷性光譜特征,使利用宏觀技術(shù)(高光譜遙感)進行微觀信息(巖石與礦物)探測成為可能。巖礦分布信息提取及定量反演是高光譜遙感地質(zhì)應(yīng)用的重要方向,目前多采用礦物光譜填圖、主成分變換、基于光譜特征提取的波段比值等方法提取蝕變礦物信息,已取得了很大進展。成像光譜技術(shù)的發(fā)展極大地促進了地質(zhì)找礦方法的完善,提高了識別的精度。但混合像元的存在是傳統(tǒng)的巖礦分布識別方法難以達到實用要求的主要原因。混合像元分解技術(shù)是解譯像元的重要手段,可從混合像元中分解出所需的巖石、礦物信息,實現(xiàn)對巖石與礦物的精確識別和定量反演。
目前,隨著現(xiàn)代信息技術(shù)、人工智能、大數(shù)據(jù)等新技術(shù)的不斷涌現(xiàn)和快速發(fā)展,傳統(tǒng)的礦山正在向無人采礦、智能采礦和智慧礦山邁進和發(fā)展,其中必備的兩項技術(shù)“現(xiàn)代通訊技術(shù)、采掘自動化技術(shù)”已經(jīng)實現(xiàn)或部分實現(xiàn),而與其同等重要的第3種技術(shù)——礦巖智能感知技術(shù)則發(fā)展緩慢 ,亟待突破。本研究選取露天采場為試驗場,研究基于無人機成像光譜的露天鐵礦探測技術(shù),為露天采礦的礦巖分布及邊界確定提供一種新的技術(shù),也為實現(xiàn)露天無人采礦的礦巖智能感知提供新的思路。
現(xiàn)場試驗
2.1 研究區(qū)概況
啞巴嶺露天采場是礦石原料的重要生產(chǎn)地,位于遼寧省鞍山市。礦石類型為典型的鞍山式鐵礦,主要為赤鐵礦,多為貧鐵礦,鐵品位多位于20%~35%區(qū)間,圍巖主要有千枚巖、綠泥石片巖、斜長角閃巖、混合花崗巖、云母片巖。
2.2 數(shù)據(jù)采集及預(yù)處理
目前多數(shù)遙感地質(zhì)的研究數(shù)據(jù)主要來自衛(wèi)星平臺。近年來無人機高光譜技術(shù)逐漸趨于成熟與完善,與其他傳感器平臺相比,無人機操作簡單、航線及飛行高度可調(diào)整、數(shù)據(jù)獲取方式便捷。并且,由于無人機遙感探測高度低,空間分辨率較高使得地物識別精度大幅提高,適合于小面積礦區(qū)的地面調(diào)查。
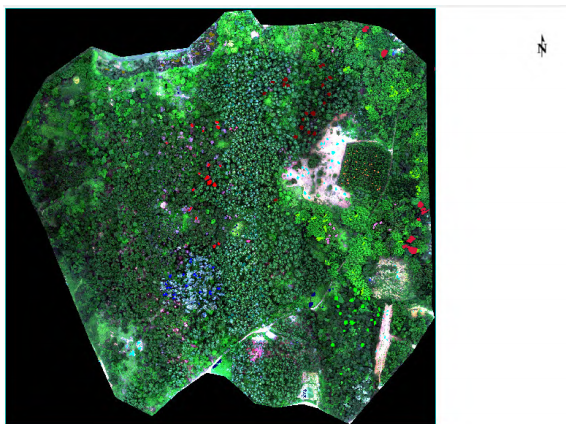
且由于數(shù)據(jù)獲取周期短,保障了采場監(jiān)測數(shù)據(jù)獲取的靈活性與時效性。因此,本研究利用無人機搭載高光譜成像儀進行采場遙感數(shù)據(jù)采集,對無人機采集的高光譜影像進行大氣校正以及影像校正、圖像拼接等一系列預(yù)處理。由于900~1000nm波段噪聲較為嚴重,掩蓋了地物自身的光譜信息,因此本研究剔除了該波段的光譜信息,得到0.5m空間分辨率和245波段的高光譜影像,如圖1所示。
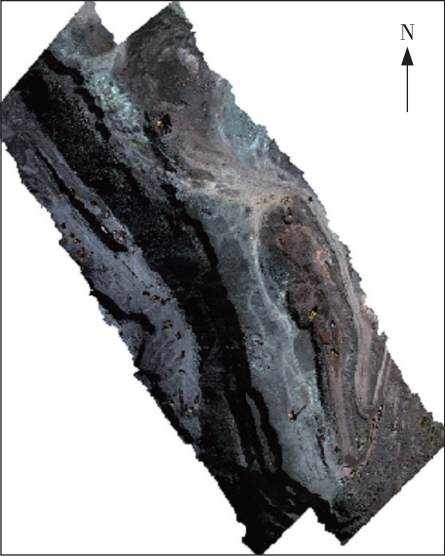
圖 1 無人機采集的研究區(qū)成像光譜數(shù)據(jù)
對采集的整幅影像進行裁剪處理,得到目標研究區(qū)域如圖2所示。圖2中的白線為礦山地質(zhì)部門根據(jù)室內(nèi)化驗結(jié)果標出的礦體分布邊界,白線圈定區(qū)域為礦體,周圍區(qū)域為圍巖。
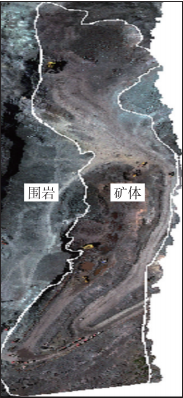
圖2研究區(qū)礦體分布
2.3 礦巖遙感識別與礦體圈定
本研究應(yīng)用混合像元分解方法對露天采場進行礦巖分布識別提取。由于礦體和圍巖的礦物種類多、復(fù)雜,且顆粒度較小,使用礦物種類作為端元處理流程比較復(fù)雜。礦體中的礦石類型主要為赤鐵礦,品位比較集中(30%左右),且近礦圍巖主要為千枚巖。因此,為簡化流程,將赤鐵礦作為礦體中的端元,千枚巖作為圍巖的端元,此外在采區(qū)還存在少量積水、車輛和陰影地物。最終選擇5種地物作為混合像元分解的端元,分別是赤鐵礦、千枚巖、積水、車輛和陰影。通過應(yīng)用軟件在目標研究區(qū)的影像上建立感興趣區(qū)ROI,提取各種端元地物的反射率光譜曲線作為端元光譜,這種手工選取端元光譜的方法準確可靠且簡單快速,但需要操作者對研究區(qū)具有較高的認識水平。
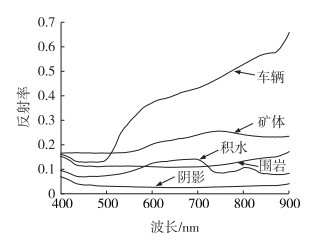
圖3 各端元的光譜曲線
5種端元的光譜曲線如圖3所示,根據(jù)對比可發(fā)現(xiàn),圍巖與礦體的光譜曲線具有一定差異,千枚巖在400~900nm波段范圍內(nèi)無明顯的光譜特征,反射率值均較低,且分布集中,多位于0.10~0.15區(qū)間。由于Fe3+的電子躍升,礦體的光譜在750nm(紅光波段)附近形成了一個微弱的反射峰特征。車輛的整體反射率較高,陰影的反射率較低且平緩,積水在可見光波段600nm之前,水的吸收少,反射率較低,在700nm處達到一個峰值。因此混合像元分解技術(shù)可基于不同端元的光譜差異將其進行有效區(qū)分。本研究通過編程實現(xiàn)了全約束最小二乘算法運算,將研究區(qū)影像及5種端元光譜作為輸入數(shù)據(jù),試驗結(jié)果如圖4所示,依次為礦體、圍巖、陰影、積水、車輛的豐度圖。
將圖4(a)與圖2進行對比,發(fā)現(xiàn)應(yīng)用混合像元分解技術(shù)提取的礦體與室內(nèi)化驗圈定的礦體分布基本一致。但圖2中人工圈定的礦巖界線分明,而使用混合像元分解技術(shù)圈定的礦體界線比較模糊,但這在一定程度上可能反映了真實的礦體分布情況。為定量評價提取出的礦體分布精度,本研究將兩種方法提取的結(jié)果進行了對比。基于線性混合模型原理,使用礦體對應(yīng)的豐度信息,按照下式計算其在露天采場中的分布面積。
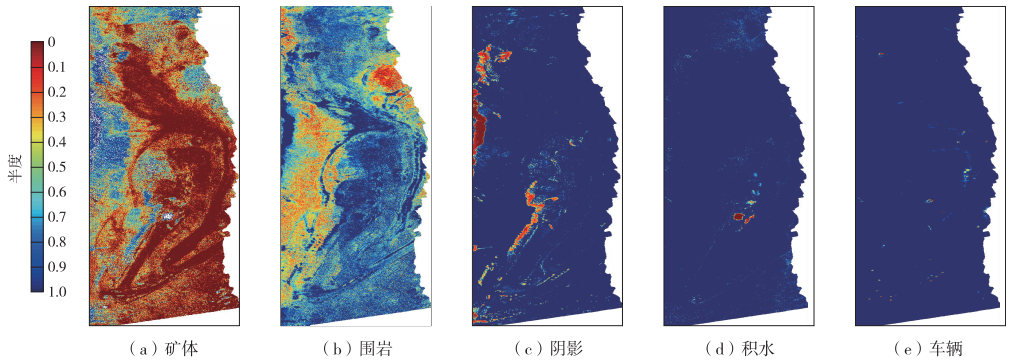
圖4 各端元對應(yīng)的豐度分布
式中,Xi為第i個像元中礦物的豐度;R為圖像的空間分辨率m;n為像元總數(shù);S為采場中某種礦物的分布面積,m2。經(jīng)過式(7)計算得出,本研究試驗提取的礦體分布面積為62365.47m2,圖3中礦體圈定面積為67859.25m2,面積相對精度為91.90%,提取結(jié)果較為理想。
3、本章小結(jié)
(1)目前采場礦巖識別方法以傳統(tǒng)的化驗方法為主,存在采樣密度低、化驗周期長、效率低、品位測試結(jié)果滯后等不足,導(dǎo)致礦體邊界圈定不準,嚴重影響了后續(xù)生產(chǎn)。應(yīng)用混合像元分解技術(shù),利用無人機采集研究區(qū)的成像光譜數(shù)據(jù),研究了露天鐵礦采場中礦巖識別與自動提取方法。現(xiàn)場試驗結(jié)果表明,基于無人機高光譜技術(shù)的露天鐵礦圈定技術(shù)可 對鐵礦體進行有效圈定,與現(xiàn)有的室內(nèi)化驗圈定的礦體面積相比,精度較高,為實現(xiàn)礦巖智能感知提供了新的方法。
(2)本研究基于高光譜遙感技術(shù)只進行了礦巖識別分析,后續(xù)將進行礦石品位的反演研究。
推薦:
無人機機載高光譜成像系統(tǒng)iSpecHyper-VM100
一款基于小型多旋翼無人機高光譜成像系統(tǒng),該系統(tǒng)由高光譜成像相機、穩(wěn)定云臺、機載控制與數(shù)據(jù)采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統(tǒng)通過獨特的內(nèi)置式或外部掃描和穩(wěn)定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質(zhì)量較差的問題,并具備較高的光譜分辨率和良好的成像性能。
審核編輯 黃宇
-
探測
+關(guān)注
關(guān)注
0文章
211瀏覽量
20368 -
光譜
+關(guān)注
關(guān)注
4文章
837瀏覽量
35264 -
無人機
+關(guān)注
關(guān)注
230文章
10503瀏覽量
181619
發(fā)布評論請先 登錄
相關(guān)推薦
【Aworks申請】基于無線通信技術(shù)的無人機應(yīng)急救援系統(tǒng)研究
【FireBLE申請】基于無線通信技術(shù)的無人機應(yīng)急救援系統(tǒng)研究
無人機你們是知道了,那么反無人機有幾個會知道?
都在談?wù)?b class='flag-5'>無人機:教你10種利用無人機賺錢的方法
無人機+探地雷達=地雷探測器?
無人機類型之植保無人機,帶你了解什么是植保無人機?
無人機探測技術(shù)
知語云:低慢小無人機如何反制管制監(jiān)測行為?方式方法又是什么?
淺談無人機探測系統(tǒng)
無人機載成像光譜儀的詳細介紹
無人機探測系統(tǒng)的詳細介紹
無人機高光譜數(shù)據(jù)處理與建模方法
無人機載高光譜成像設(shè)備的研究及應(yīng)用進展
基于無人機高光譜遙感的森林可燃物分類方法研究-萊森光學





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論