 2023年電子設計大賽E題分享(基于CW32)
2023年電子設計大賽E題分享(基于CW32)
一、團隊介紹
團隊成員:姚凱 王玉錢 陳葉璐健
二、題目要求
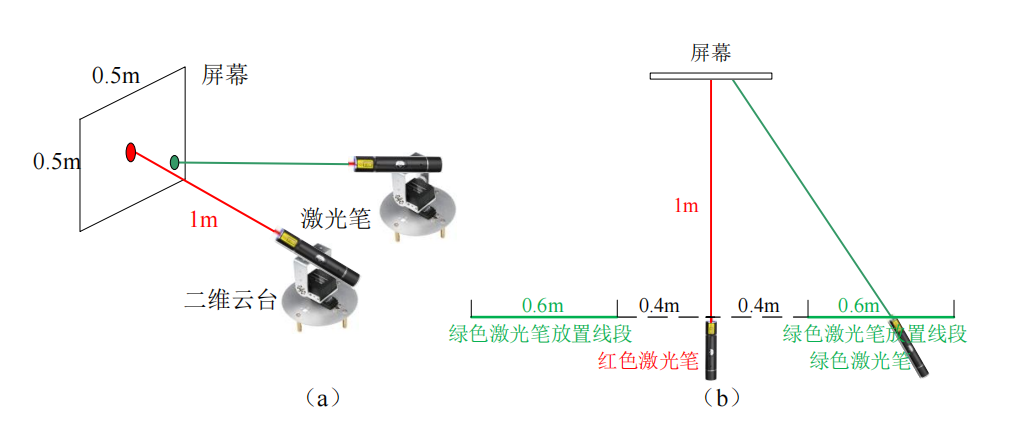
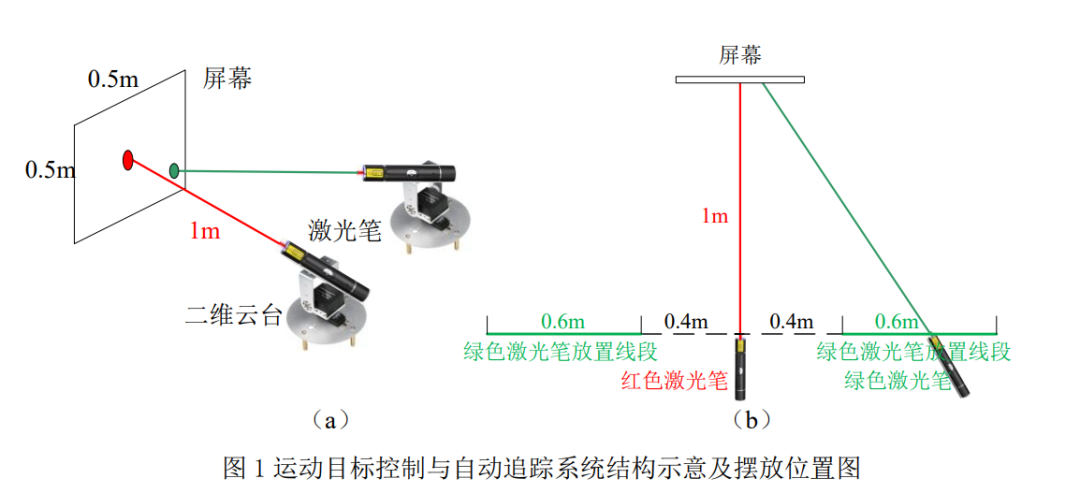
設計制作一個模擬目標運動的紅色光斑位置控制系統和指示自動追蹤的綠色光斑位置控制系統
三、題目分析
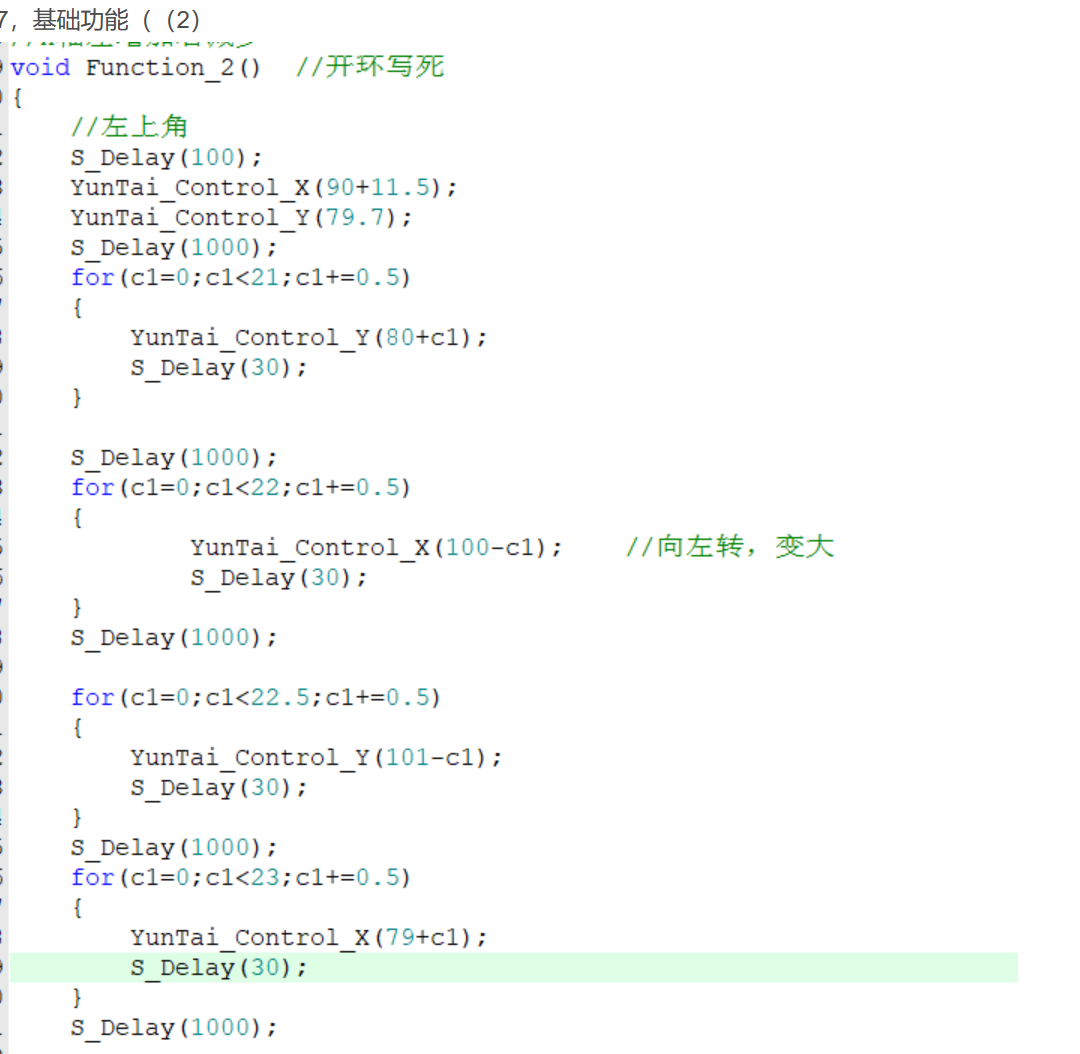
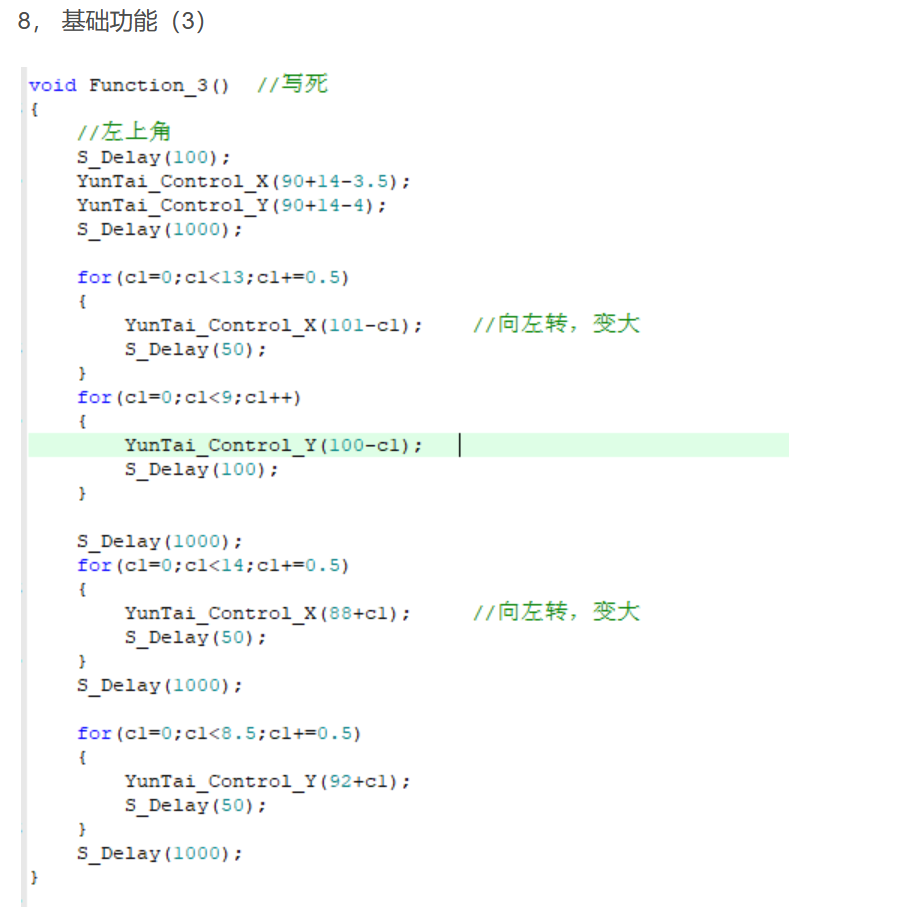
如果開環寫:首先將激光筆放在舵機云臺上,紅色激光中心點對準紙張中心點,所有參數矯正好,這樣,基礎1第一的問題就完成了,執行復位程序,讓舵機指定該角度即可;其次,第二問第三問,相當于一個問題,指定矩形位置和長度,進行控制,建個模型
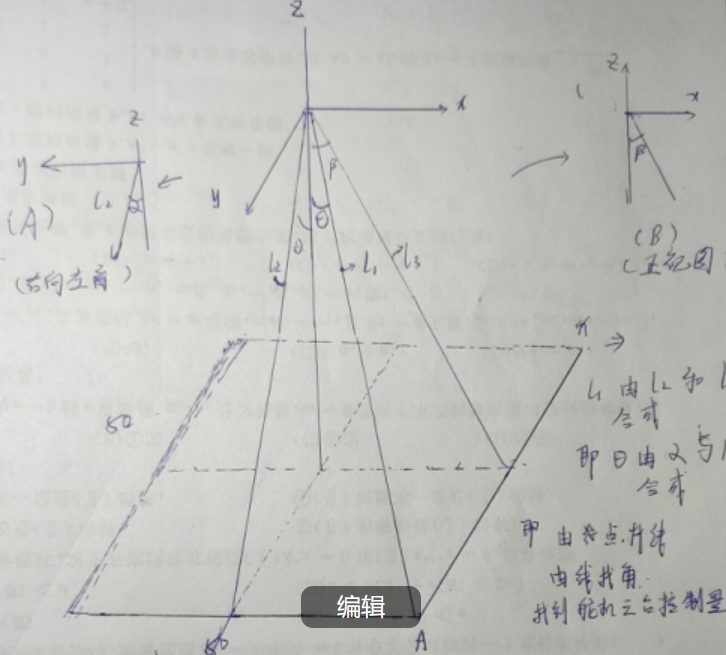
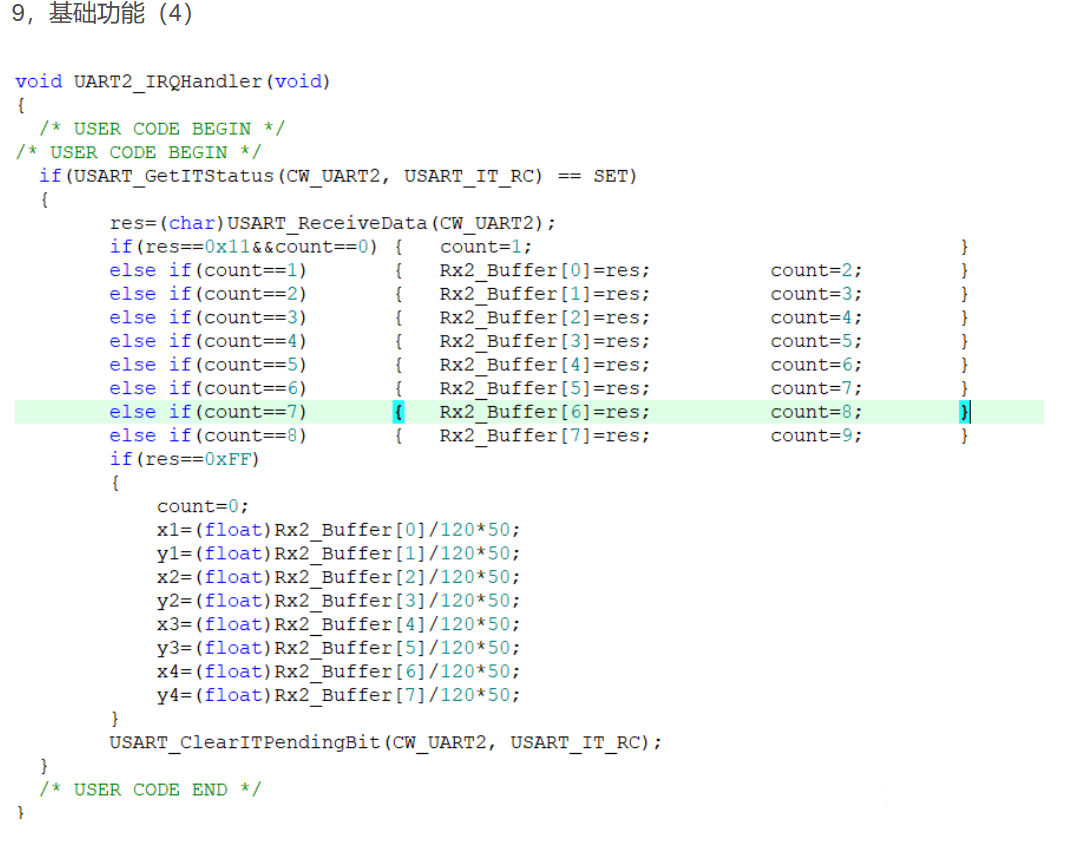
假設從上往下看,板子位于底板上,舵機云臺在上方,他們(x,y)坐標均為(0,0),如果紅色激光想達到A點,空間線反推一下分別投影到yoz平面上,xoz平面上,即可用反正切函數算出舵機云臺x,y軸轉動角度,用cw32030c8t6控制舵機精確轉動即可讓激光打到A點,另外發現紅色激光沿著邊長移動時,總會一個角不變,所以就可以簡單點,不必離散點計算,讓程序遞進控制一個軸即可。按照這個思路,第(2)(3)要求就完成了,前提參數調好。第(4)個要求就必須要用到攝像頭給出矩形的信息。用攝像頭模組實現開環控制不易之處主要在于攝像頭識別到黑色矩形的像素坐標與實際坐標的不統一,為解決這個問題,我想到的辦法是,將攝像頭像素識別框設置到120*120(實測),再把攝像頭識別框中心即(60,60)與鉛筆畫的正方形中心盡量重合,這樣像素點的坐標和實際坐標就有一定的比例相關性,舉個例子,如果矩形頂點像素坐標為(120,120),那么實際坐標就是(50,50),這樣,就可以按照(2)(3)思路,坐標量化成角度。還有一個問題是如何找到傾斜角并走斜線,因為斜著走舵機云臺x,y軸都要變化,解決這個問題首先要根據同邊兩個坐標算出傾斜角,然后利用傾斜角找到x,y控制的比例關系走斜線,形象一點,斜線可以離散成樓梯的一列邊沿的點,按傾斜角度得出樓梯的長和寬,再控制舵機的x,y傾斜角,程序不斷遞進即可走一條斜線,解決以上問題,理論上能做到畫隨意角度,隨意位置的矩形,不過實屬不易,攝像頭識別不出紅色激光點或誤差較大只好采用。
如果閉環寫:攝像頭識別正方形鉛筆線,給出4個點像素坐標,人為再這幾個點之間加坐標,以便走的絲滑,讓這些坐標按順序作為舵機x軸,y軸pid的目標值,紅色激光位置實時反饋,調好參數,即可由點成線,完成走矩形,(2)(3)(4)均可如此。(理論構想,因比賽過程對攝像頭認識不足獲取不到穩定坐標信息而未實現)
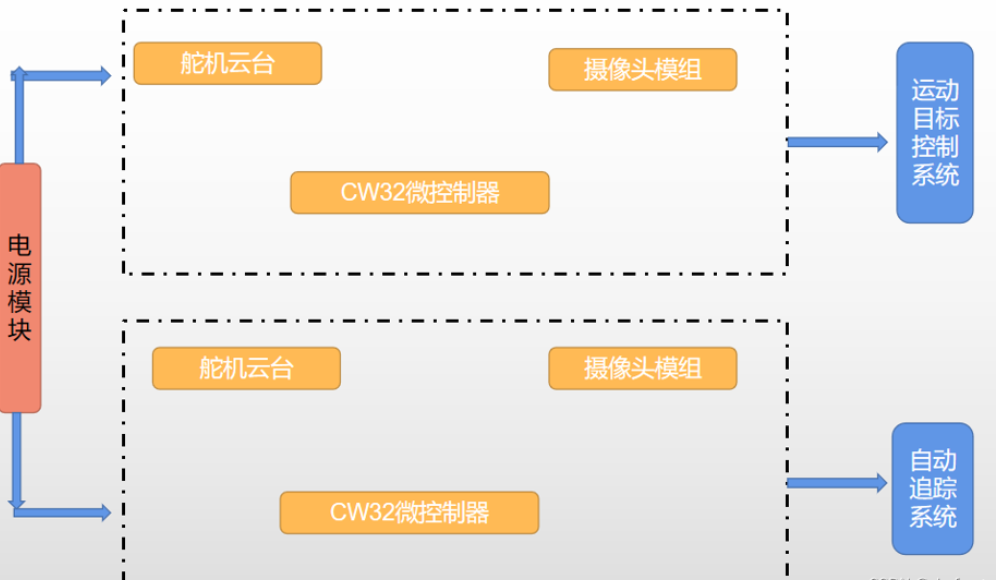
五、總體設計框圖
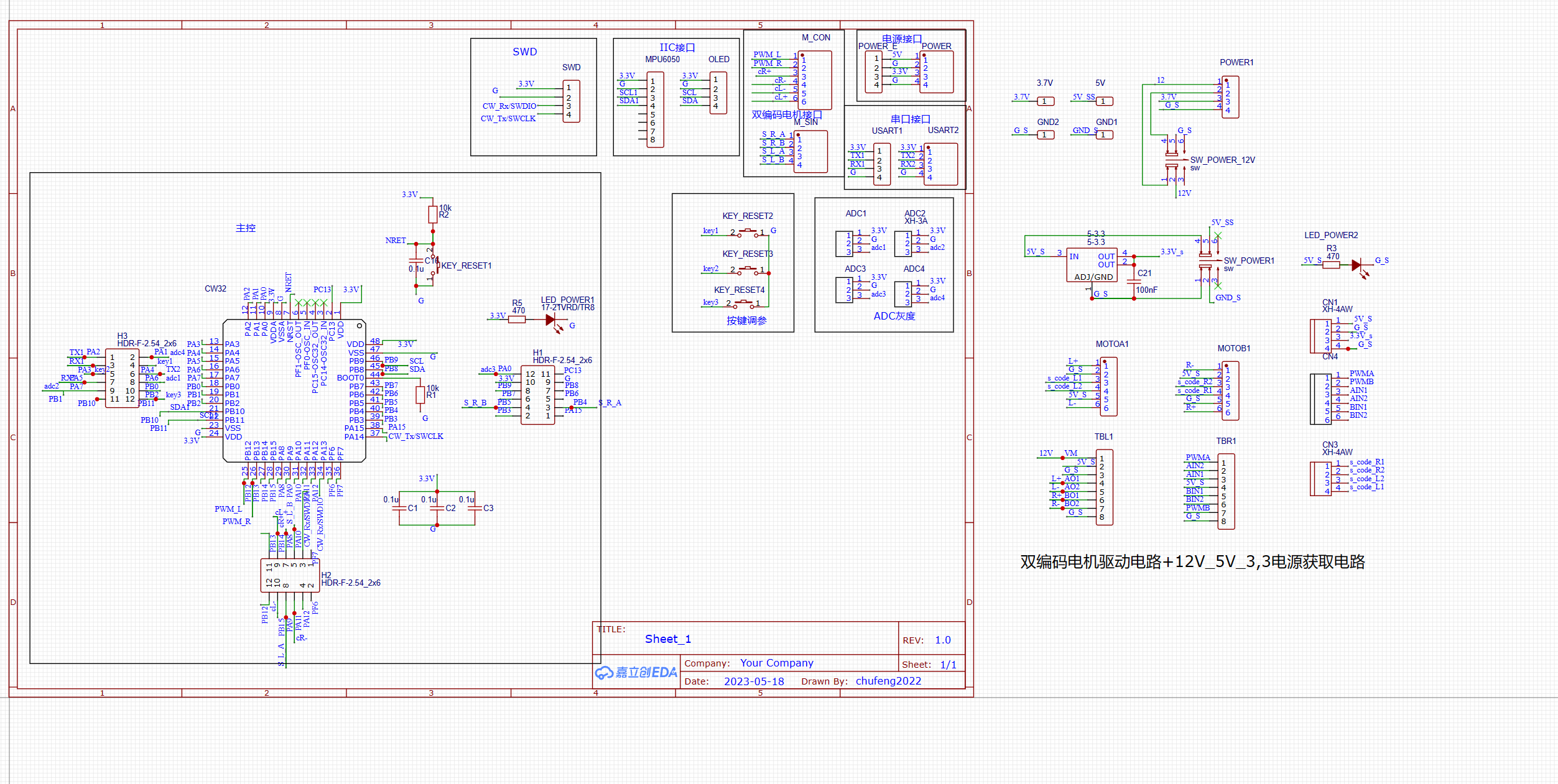
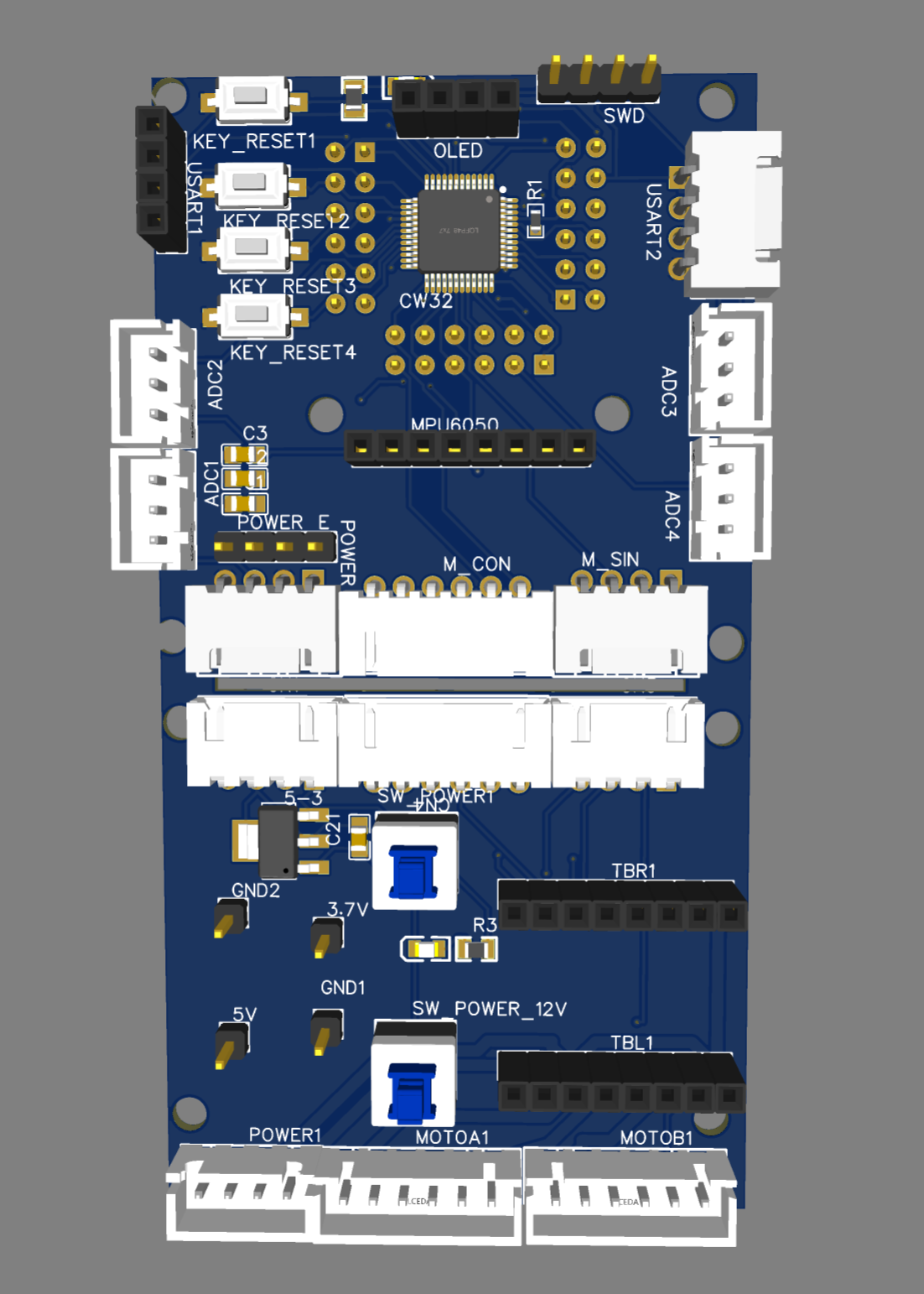
六、硬件電路組成
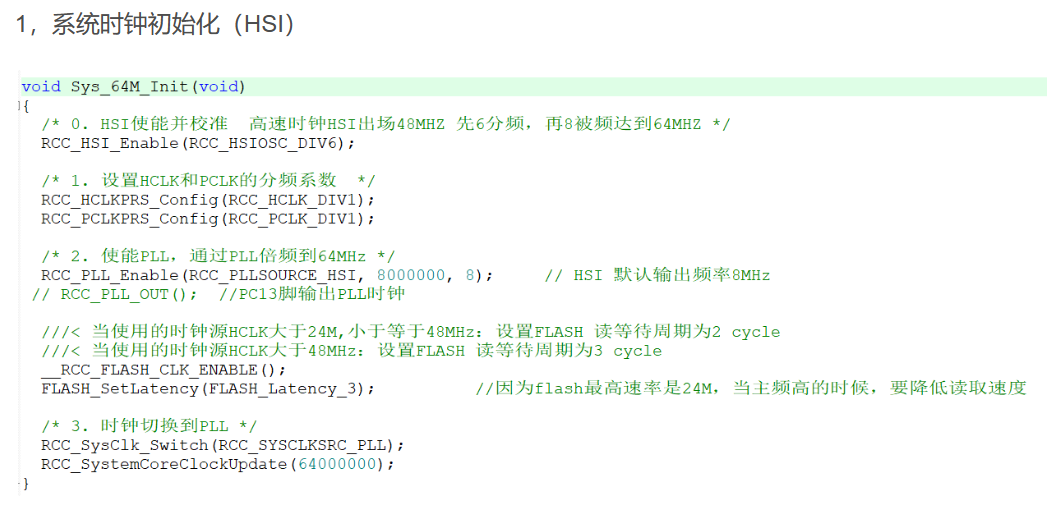
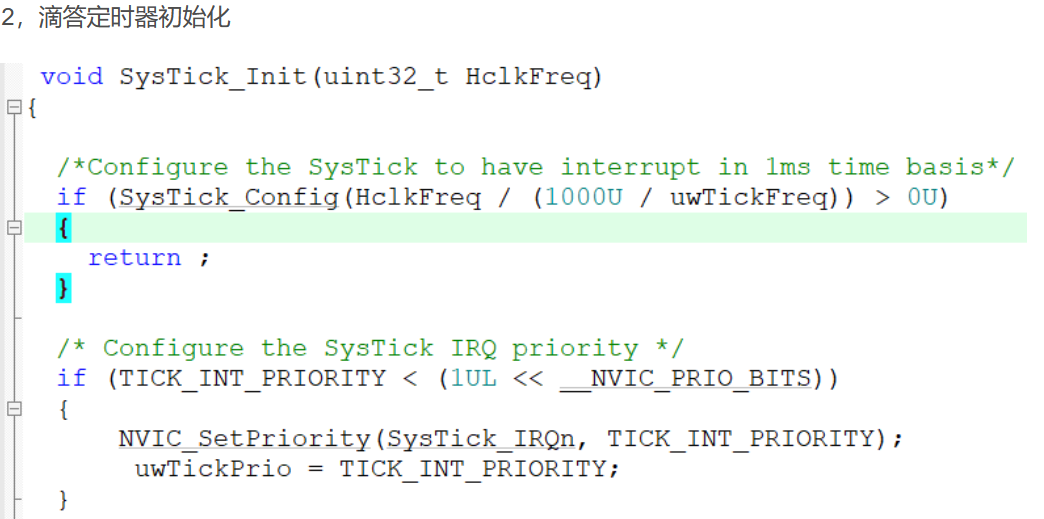
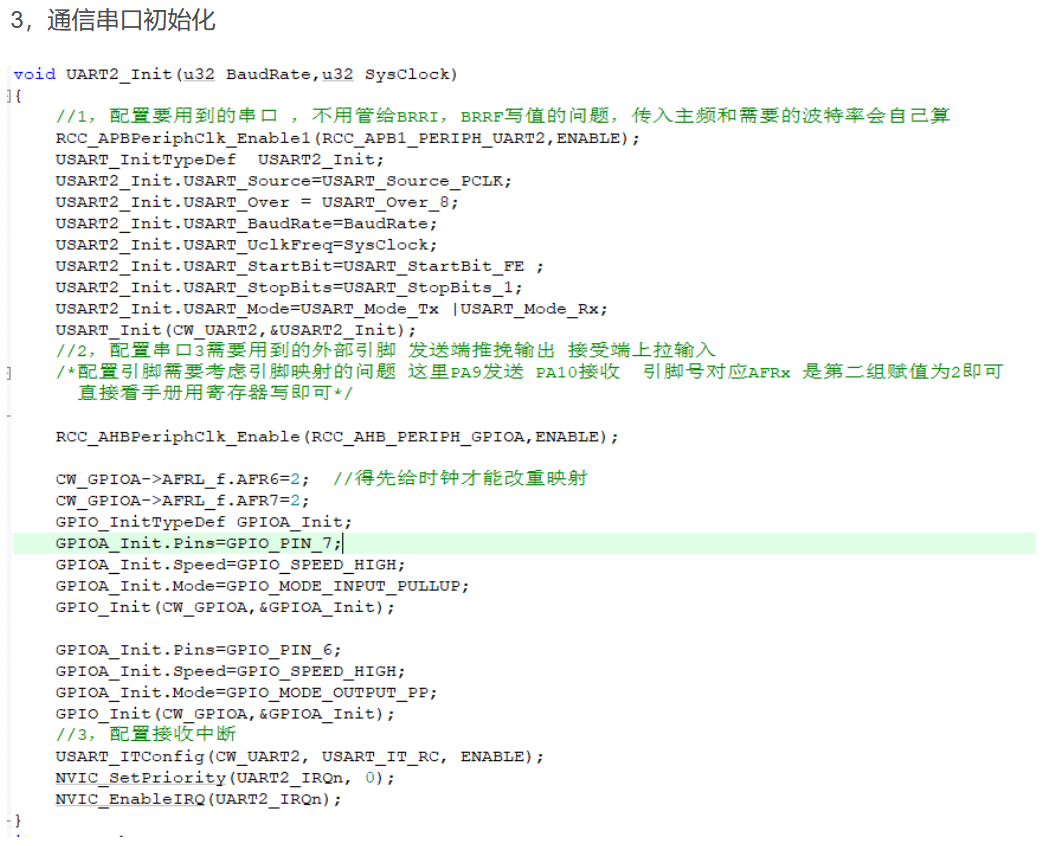
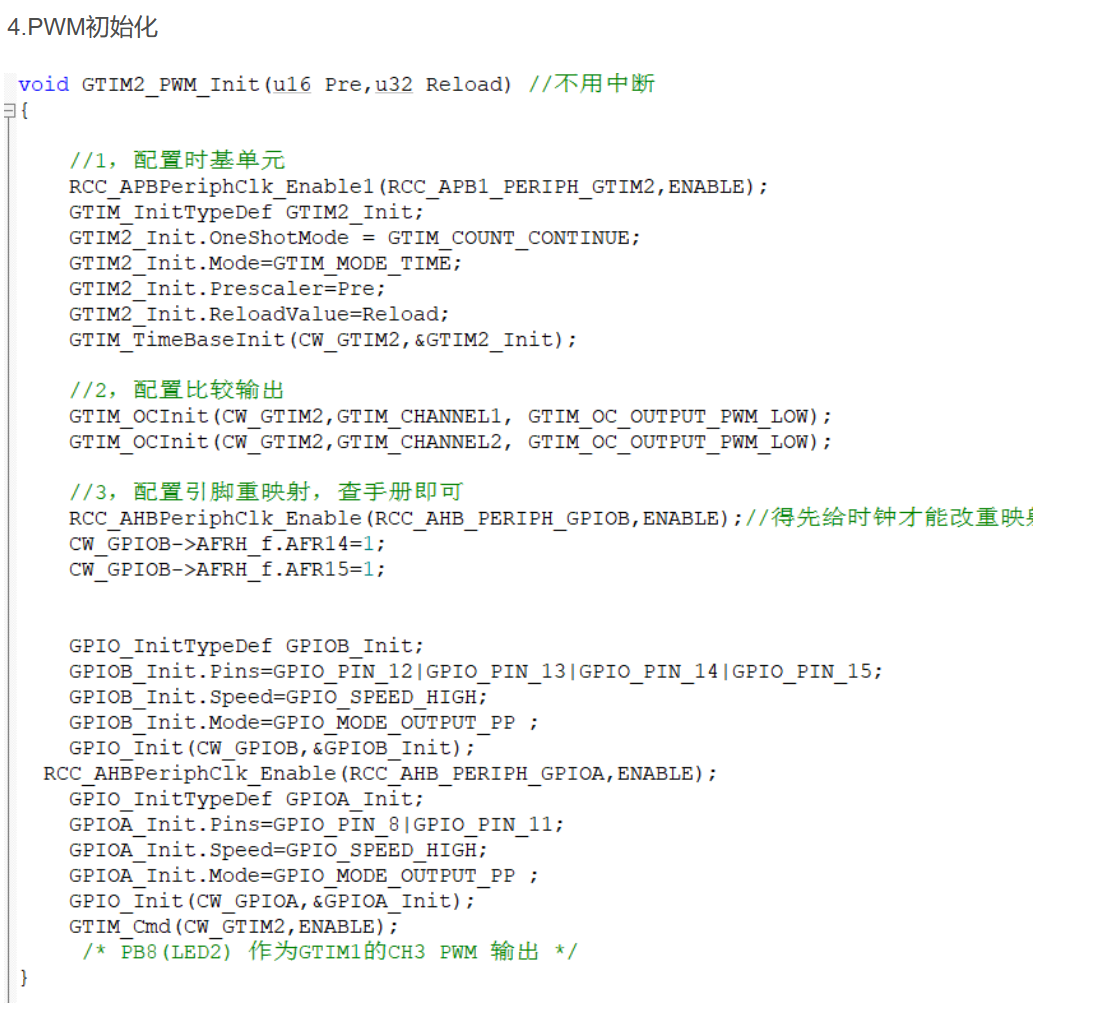
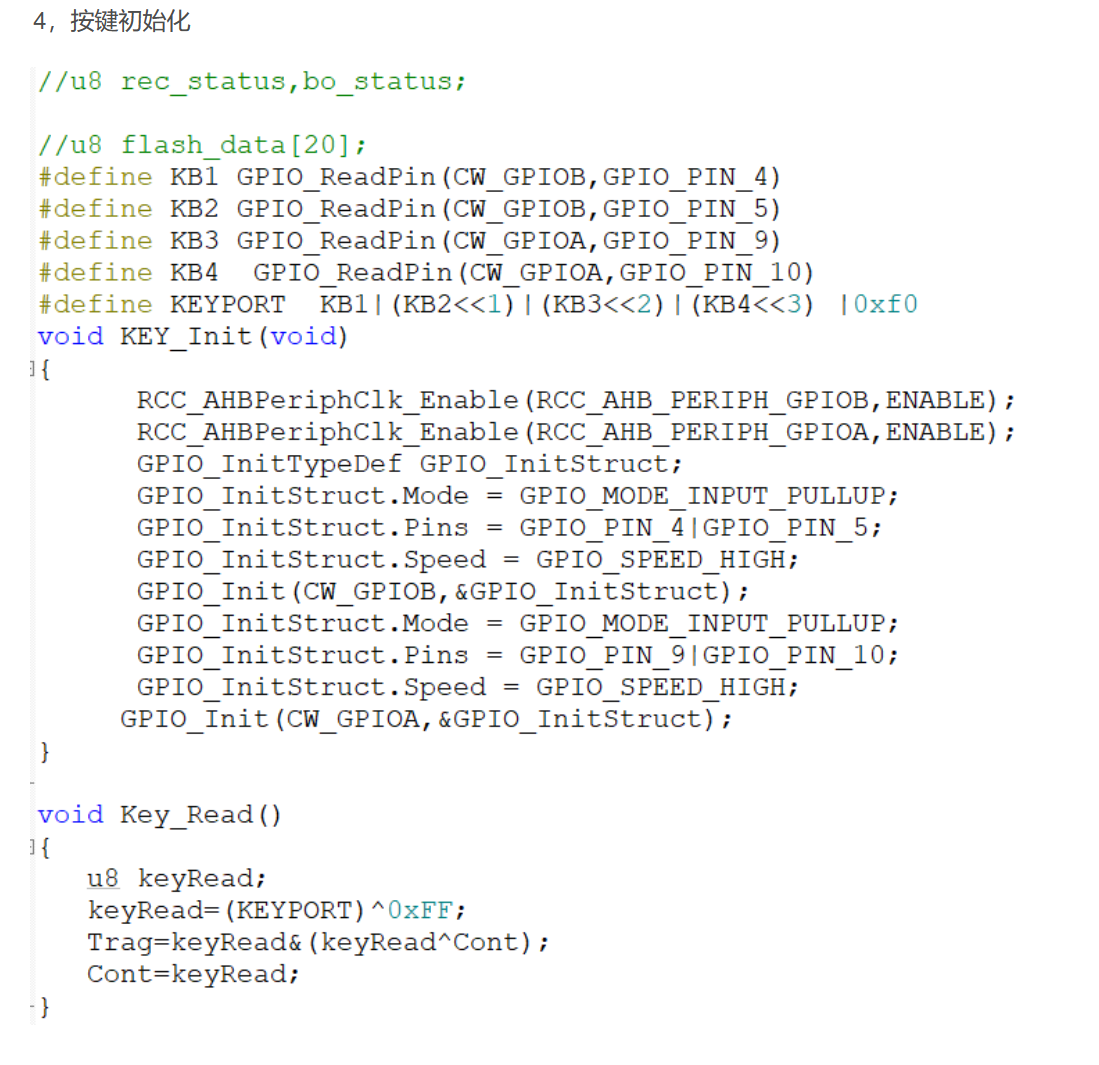
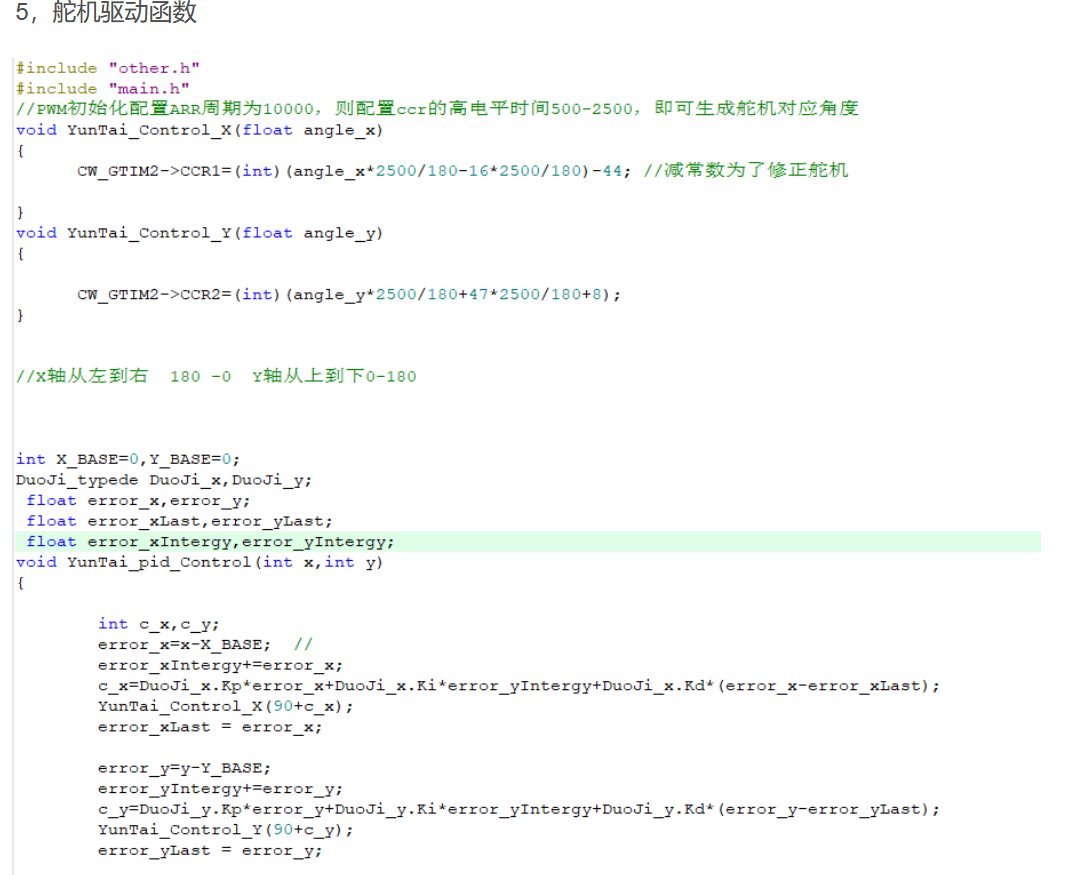
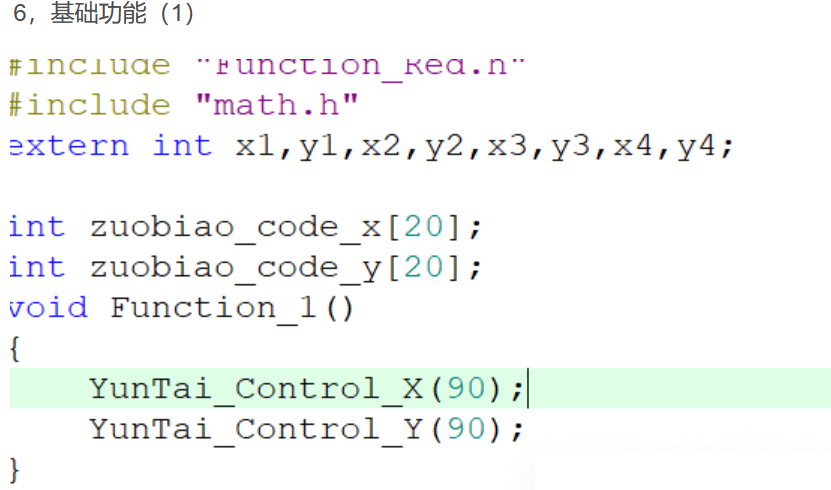
七、程序代碼:
審核編輯 黃宇
-
電子設計
+關注
關注
40文章
799瀏覽量
48606 -
CW32
+關注
關注
1文章
210瀏覽量
654
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論