") 車載時鐘同步can_tsync實現(xiàn)原理
車載時鐘同步can_tsync實現(xiàn)原理
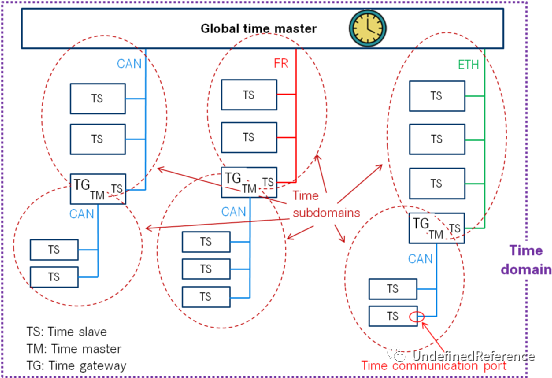
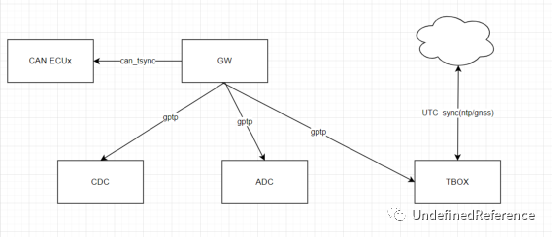
CAN時鐘同步來源,AUTOSAR cp的規(guī)范,AUTOSAR定義的基于CAN總線時間同步的CanTSyn模塊處理CAN總線上的時間信息分發(fā),它以廣播的形式將時間信息從master節(jié)點(TM) 傳輸?shù)礁鱯lave節(jié)點(TS),還可通過時間網(wǎng)關(guān)(TW)將時間同步到其他子網(wǎng),以解決因各ECU節(jié)點的硬件時鐘信號偏差、CAN總線傳輸延時如協(xié)議仲裁以及各ECU節(jié)點內(nèi)的軟件處理等原因?qū)е碌臅r間延遲。網(wǎng)絡(luò)拓?fù)淙缦拢?/p>
can_tsync實現(xiàn)原理
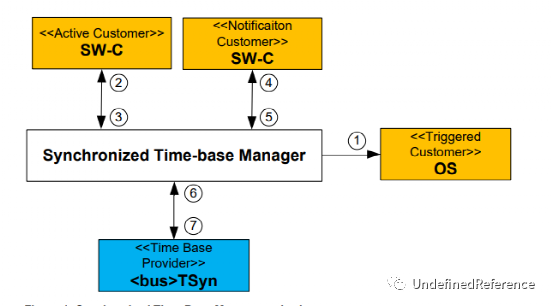
有了上述基礎(chǔ)之后,我們會理解到can timesync實現(xiàn)起來也不會太難,在autosar cp的框架下,所有的時間都是從StdmM(Synchronized Time-Base Manager)獲取的。所以,我們可以如下偽代碼:
C
// can time master
TimeRaw_t t0r;
StbM_GetCurrentTimeRaw(&t0r);
CanTsync_SetT0r(t0r);
CanIf_Transmit(sync_message);
CanTsync_TxComfirmation()
{
TimeRaw_t t1r;
StbM_GetCurrentTimeRaw(&t1r);
uint32_t t4r = CanTsync_GetT4r(t0r, t1r);
CanTsync_SetT4r(t4r);
CanIf_Transmit(fup_message)
}
C
// can time slave
TimeRaw_t t2r, t3r, t4r, t0r;
CanSync_RxIndication(sync_msg)
{
StbM_GetCurrentTimeRaw(&t2r);
t0r = CanTsync_GetT0r(sync_msg);
}
CanSync_RxIndication(fup_msg)
{
StbM_GetCurrentTimeRaw(&t3r);
t4r = CanTsync_GetT0r(fup_msg);
TimeRaw_t real_time = CanTsync_CalcuTimeOffset(t0r, t2r, t3r, t4r);
StbM_SetGlobalTime(real_time);
}
can tsync來源于autosar cp,所以上述實現(xiàn)風(fēng)格也是仿照autosar cp的風(fēng)格。StbM是整個cp的時間基礎(chǔ)管理,負(fù)責(zé)抽象底層不同的時間同步協(xié)議,為上層提供統(tǒng)一的時間戳接口以及當(dāng)前的時間同步狀態(tài)的接口。整體框架如下:
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
CAN
+關(guān)注
關(guān)注
57文章
2755瀏覽量
463743 -
車載
+關(guān)注
關(guān)注
18文章
612瀏覽量
83388 -
總線
+關(guān)注
關(guān)注
10文章
2882瀏覽量
88106 -
時鐘同步
+關(guān)注
關(guān)注
0文章
87瀏覽量
12766
發(fā)布評論請先 登錄
相關(guān)推薦
同星多設(shè)備間的時間戳同步機(jī)制TSync功能與使用
隨著汽車網(wǎng)絡(luò)測試的通道數(shù)量不斷增加,時常需要多個同星設(shè)備同時連接在同一臺電腦的同一個TSMaster應(yīng)用程序,并進(jìn)行多設(shè)備同時執(zhí)行CAN報文收發(fā)和記錄等功能,必然有多設(shè)備之間的時間戳同步以及設(shè)備

AUTOSAR CAN時鐘同步問題
請問有沒有AUTOSAR CAN時鐘同步的能運(yùn)行的代碼,或者有沒有能做這一塊的大佬,主要是CanTsyn和STBM這兩個模塊的。有償,價格都好商量,急需。
發(fā)表于 11-09 00:00
分析PTN時鐘同步技術(shù)及應(yīng)用
時鐘同步是分組傳送網(wǎng)(PTN)需要考慮的重要問題之一。可以采用同步以太網(wǎng)、IEEE 1588v2、網(wǎng)絡(luò)時間協(xié)議(NTP)等多種技術(shù)實現(xiàn)時鐘同步
發(fā)表于 12-16 12:01
?5580次閱讀
基于總線同步時鐘卡設(shè)計與實現(xiàn)(PCI Express)
各個設(shè)備之間時間的一致性和準(zhǔn)確性,系統(tǒng)中配備時鐘源進(jìn)行授時,同步時鐘卡從時鐘源獲取高精度的時間,使系統(tǒng)中各個設(shè)備與主機(jī)時鐘源保持高精度的
發(fā)表于 10-30 13:25
?1次下載
基于FPGA的高精度同步時鐘系統(tǒng)設(shè)計
介紹了精密時鐘同步協(xié)議(PTP)的原理。本文精簡了該協(xié)議,設(shè)計并實現(xiàn)了一種低成本、高精度的時鐘同步系統(tǒng)方案。該方案中,本地
發(fā)表于 11-17 15:57
?7553次閱讀
微波時鐘同步設(shè)計方案
v2,SyncEth,ToP,TDM時鐘同步等,以滿足無線設(shè)備和傳輸設(shè)備的時鐘同步和傳輸需求。 微波時鐘
發(fā)表于 12-07 20:51
?747次閱讀
車載以太網(wǎng)和CAN的區(qū)別
車載以太網(wǎng)和CAN的網(wǎng)絡(luò)撲拓結(jié)構(gòu)不同,車載以太網(wǎng)采用的是點對點的星型拓?fù)浣Y(jié)構(gòu),而CAN總線采用的是總線型結(jié)構(gòu)。
IEEE1588時鐘同步在PTN網(wǎng)中的實現(xiàn)
電子發(fā)燒友網(wǎng)站提供《IEEE1588時鐘同步在PTN網(wǎng)中的實現(xiàn).pdf》資料免費(fèi)下載
發(fā)表于 10-24 09:39
?0次下載

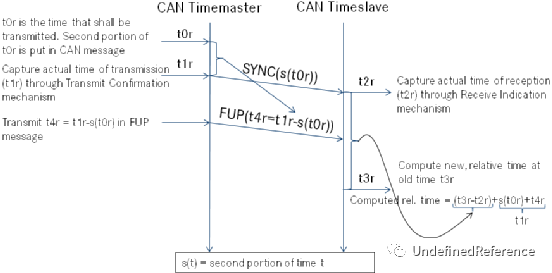
車載時鐘同步can_tsync同步原理
can_tsync同步原理 整體來說,can的時間同步還是比較簡單的,如下圖所示,整個過程如下(tips:時間戳自1970年1月1日00:00:00經(jīng)過的時間,是由秒+納秒組成的。):
車載gptp同步原理介紹
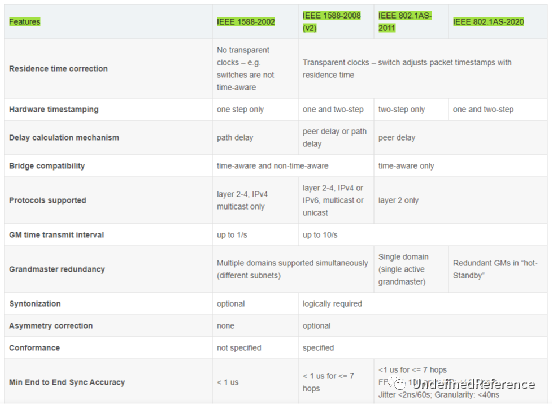
不通的ptp版本和gptp的對比如下: gptp同步原理 針對gptp,所有slave節(jié)點,都與master(grandmaster)的時鐘保持同步;在車載領(lǐng)域,master節(jié)點都是靜
車載時間融合與utc同步
時間融合和使用 對于整車來說,Tsync模塊需要將整車所有vehicle time和utc同步好,對于用戶來說,開發(fā)者最好提供獲取vehicle time和utc時間的接口,用戶無需要關(guān)注時鐘
控制系統(tǒng)之間如何實現(xiàn)時鐘同步?
控制系統(tǒng)之間如何實現(xiàn)時鐘同步? 控制系統(tǒng)之間的時鐘同步是確保不同系統(tǒng)之間的時鐘保持一致的過程。它在許多實時應(yīng)用中非常重要,如分布式系統(tǒng)、通信
時鐘同步怎樣組網(wǎng)?
的時鐘在一開始很可能并不完全一致,這可能是由于硬件差異、通信延遲、時鐘漂移或其他因素引起的。因此,時鐘同步對于網(wǎng)絡(luò)中各個節(jié)點的協(xié)同操作具有重要意義。在網(wǎng)絡(luò)中
網(wǎng)絡(luò)時鐘同步有哪些要求?如何在5G網(wǎng)絡(luò)中測試時間與時鐘同步?
實現(xiàn)數(shù)據(jù)的正確傳輸和協(xié)調(diào)。 網(wǎng)絡(luò)時鐘同步的要求主要包括以下幾個方面: 1. 精度要求:根據(jù)不同的應(yīng)用場景和需求,對網(wǎng)絡(luò)時鐘同步的精度要求也有
RobustRIO-E模塊 時鐘同步&分發(fā),實現(xiàn)聲音與振動板卡間及跨機(jī)箱時鐘同步
同步時鐘發(fā)生器 + 同步時鐘分發(fā)器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論