 24GHz軌跡跟蹤雷達模組,可檢測區域內人員位置、數量
24GHz軌跡跟蹤雷達模組,可檢測區域內人員位置、數量
前言
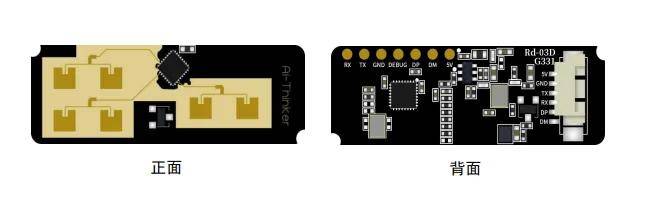
安信可新款雷達模組Rd-03D已經上市,該雷達采用一發兩收的天線,可以實現目標跟蹤,實現對區域內目標測距、測角和測速。
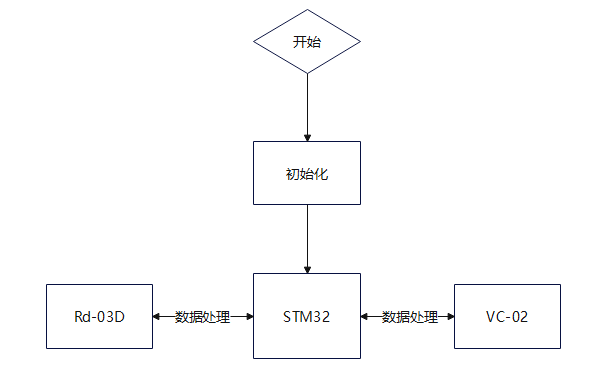
本應用示例使用STM32解析Rd-03D的串口數據,將結果通過另一個串口發送給VC-02開發板,實現對當前人數的實時播報。
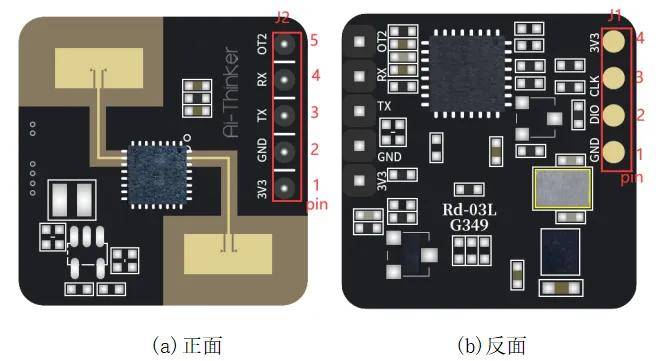
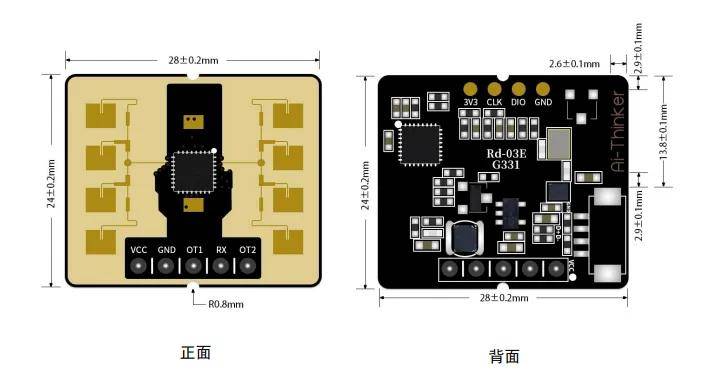
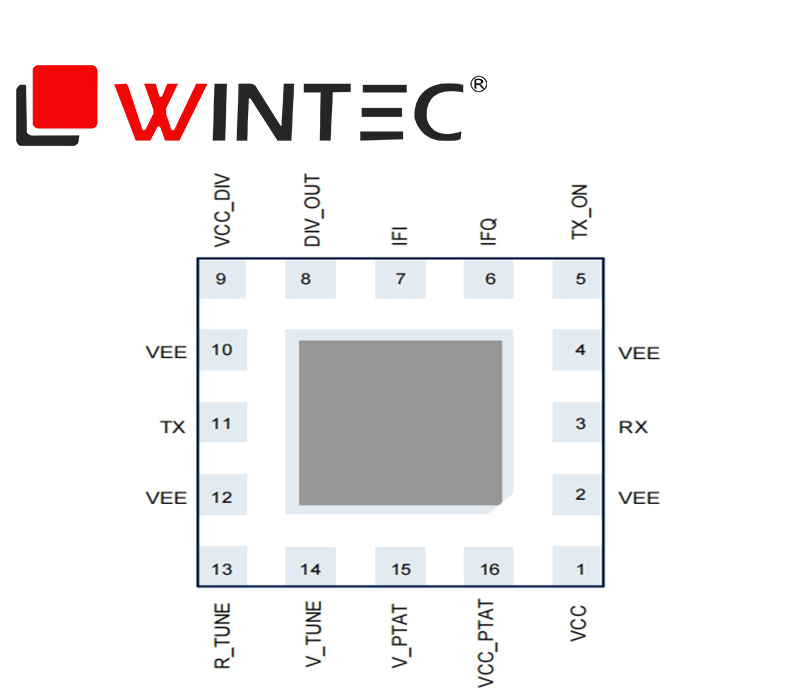
01Rd-03D引腳說明
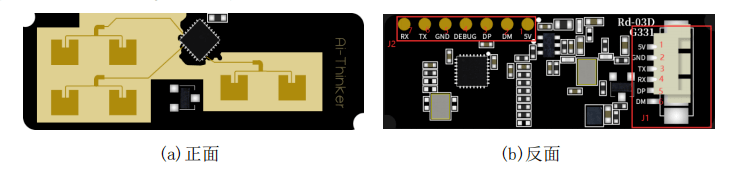
J1引腳說明:

J2引腳說明:

02軟件設計框架
03STM32F103C8T6使用CubeMX搭配HAL庫配置
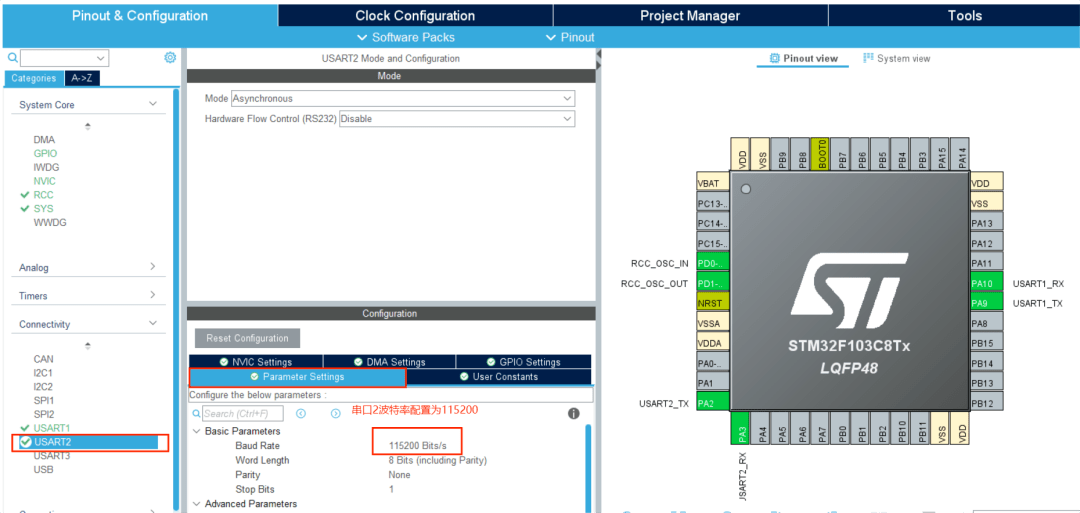
打開CubeMX,選擇STM32F103C8T6。
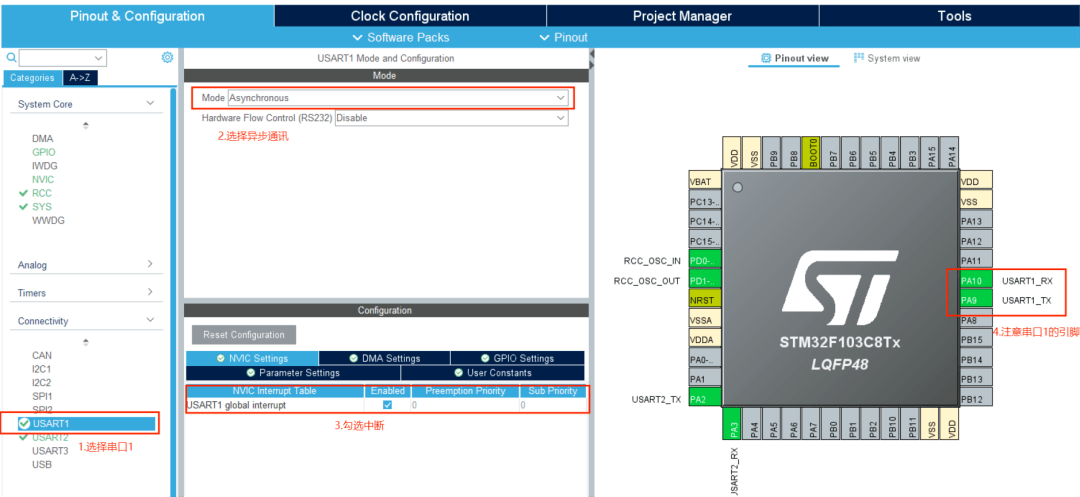
選擇兩個串口,分別是串口1和串口2,PA9為USART1_TX,PA10為USART1_RX,PA2為USART2_TX,PA3為USART_RX。
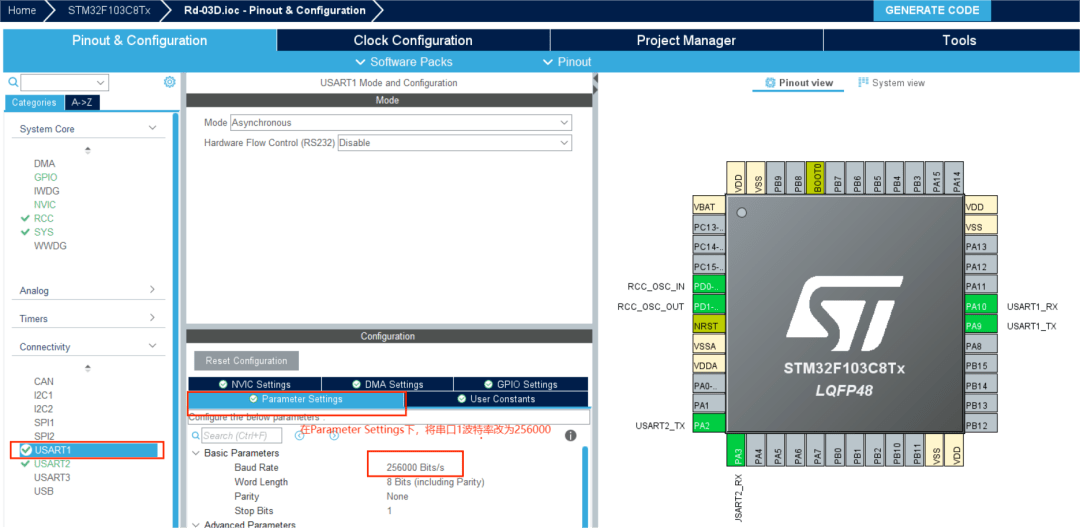
選擇異步通訊,勾選中斷,注意:串口1的波特率為256000,串口2波特率為115200。
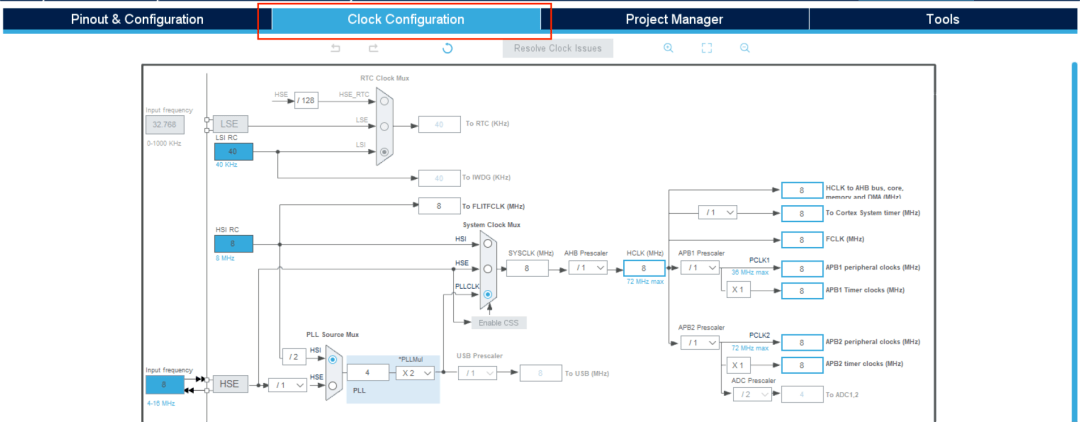
下面附上時鐘配置圖:
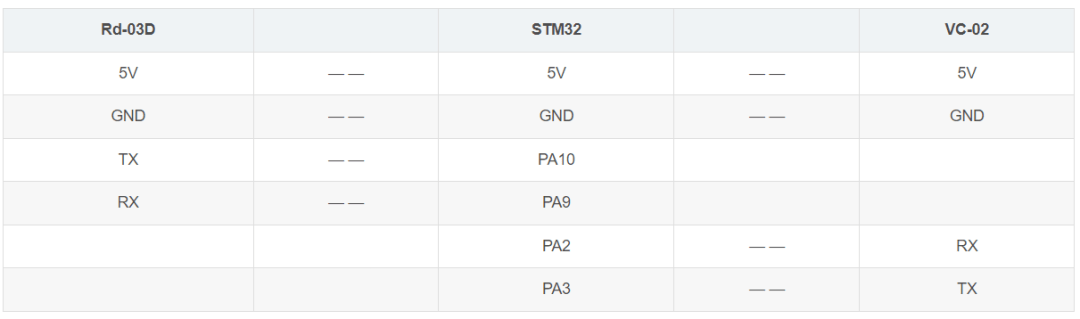
04STM32與Rd-03D和VC-02的接線
05串口數據處理
一、Rd-03D的串口數據
Rd-03D模組通過串口(TTL電平)與外界通信,雷達串口默認波特率為256000,1停止位,無奇偶校驗位。雷達輸出檢測到的目標信息,包括在區域中的x坐標,y坐標,以及目標的速度值。
雷達默認是處于單目標檢測模式,需要切換至多目標檢測模式。

上報是數據幀格式:

數據示例:AA FF 03 00 0E 03 B1 86 10 00 68 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 CC
紅色部分表示目標1的信息,藍色表示目標2的信息,綠色表示目標3的信息。(詳情可查看原博文內容)
本示例只展示有無人,所以只需要判斷在對應的數據幀中有沒有相應的目標信息即可。
二、VC-02的串口數據
VC-02的串口數據格式是由用戶自定義的,開發的平臺和資料可以在VC系列模組官網查看
這里附上測試中定義的串口協議和語音指令表格,串口輸出均為16進制數,文章結尾附上VC-02固件。

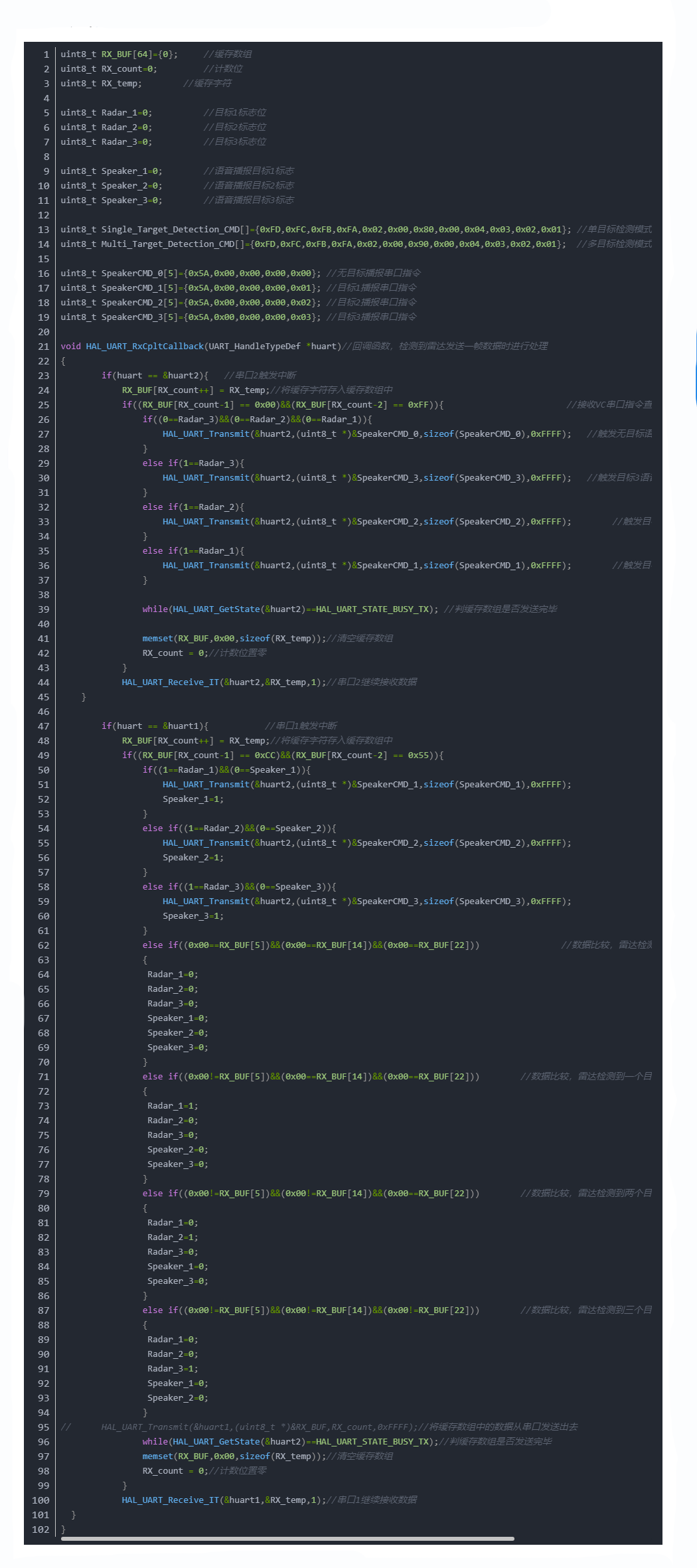
06、STM32數據處理
這里我是采取設置標志位的方式處理數據。為了防止在雷達數據下發過快時,語音一直重復播報的情況。
審核編輯 黃宇
-
檢測
+關注
關注
5文章
4488瀏覽量
91472 -
串口
+關注
關注
14文章
1554瀏覽量
76516
發布評論請先 登錄
相關推薦
LMX2595在8GH,12GHz, 24GHz都會產生雜散,為什么?
24G雷達模塊LD2450 支持人體移動軌跡跟蹤與手勢識別

0.1mA!24GHz超低功耗人體存在毫米波雷達模組
可檢測微動目標 24GHz人體感應雷達模塊ME73MS01驚艷來襲!

高精度高性價比24GHz液位檢測雷達模組
可進行精準測距、手勢識別,24G高性能毫米波雷達模組Rd-03E
24GHz軌跡跟蹤人體感應雷達模組,可檢測區域內人員位置、數量
0 基礎,0 難度,安信可Rd-03上位機配置教程
英飛凌BGT24LTR11N16:24GHz低功率雷達收發器
安信可毫米波雷達模組Rd-03E燒錄教程匯總——附上常見波特率固件








 工商網監
工商網監
評論