 ARM Cortex-M內核MCU的三重中斷控制設計
ARM Cortex-M內核MCU的三重中斷控制設計
我們知道在 MCU 裸機中程序代碼之所以能完成多任務并行實時處理功能,其實主要是靠中斷來調度的,沒有中斷,CPU 就只能按順序"呆板"地執行代碼。很多人都說是中斷能力賦予了 MCU 真正的靈魂,能正確認識和熟練使用 MCU 中斷,基本上就算玩熟了這顆 MCU。
之前寫過一篇《中斷處理函數(IRQHandler)的標準流程》,里面詳細講了中斷處理函數里的標準代碼流程與寫法,這篇文章可讓大家對 MCU 里的中斷用法有個初步認識。今天以 ARM Cortex-M 內核 MCU 為例再來介紹下業界標準的三重中斷控制設計:
一、外設事件中斷控制
MCU 中最底層的中斷控制針對的是外設里某個具體的事件,這個控制來自于外設模塊本身,以恩智浦 i.MXRT 系列 MCU 的 GPT 定時器模塊為例。如下是 GPT 模塊寄存器列表,你可以發現其中有經典的 IR 和 SR 寄存器,SR 是事件狀態寄存器,IR 是中斷事件控制寄存器:
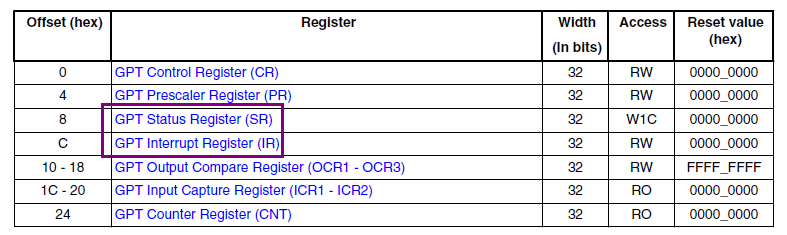
GPT 定時器一旦被使能,其運行狀態(一共支持 6 個事件:超時、輸入捕獲 x 2ch、比較輸出 x 3ch)都會實時記錄在 SR 寄存器中,如果不在 IR 寄存器中將事件中斷開啟(默認是關閉的),那么就需要用戶在代碼里手動去查詢 SR 寄存器置起的事件標志位以處理對應事件。
Note:SR 寄存器中置起的事件標志位需要在事件處理前手動清除掉。如果標志位不及時清除,可能會遺漏下一次事件的處理(比如先處理當前事件,后清除事件標志位,那么處理事件期間再次發生的事件就會被漏掉)。如果標志位忘了清除,同一次事件就會被處理兩次及以上。
當然在實際應用中,為了節省 CPU 帶寬,我們都是要開啟外設事件中斷的,MCU 廠商 SDK 包里一般都會提供相應接口函數(取自 fsl_gpt.h):
typedefenum_gpt_interrupt_enable
{
kGPT_OutputCompare1InterruptEnable=GPT_IR_OF1IE_MASK,
kGPT_OutputCompare2InterruptEnable=GPT_IR_OF2IE_MASK,
kGPT_OutputCompare3InterruptEnable=GPT_IR_OF3IE_MASK,
kGPT_InputCapture1InterruptEnable=GPT_IR_IF1IE_MASK,
kGPT_InputCapture2InterruptEnable=GPT_IR_IF2IE_MASK,
kGPT_RollOverFlagInterruptEnable=GPT_IR_ROVIE_MASK,
}gpt_interrupt_enable_t;
//開啟GPTx的xx事件中斷
staticinlinevoidGPT_EnableInterrupts(GPT_Type*base,uint32_tmask)
{
base->IR|=mask;
}
//關閉GPTx的xx事件中斷
staticinlinevoidGPT_DisableInterrupts(GPT_Type*base,uint32_tmask)
{
base->IR&=~mask;
}
使能 GPT1 的超時事件中斷代碼示例如下:
voidperiph_int_config(void)
{
//初始化GPT1...
GPT_Init(GPT1,&gptConfig);
//...
//開啟GPT1的超時事件中斷
GPT_EnableInterrupts(GPT1,kGPT_RollOverFlagInterruptEnable);
}
二、外設全局中斷控制
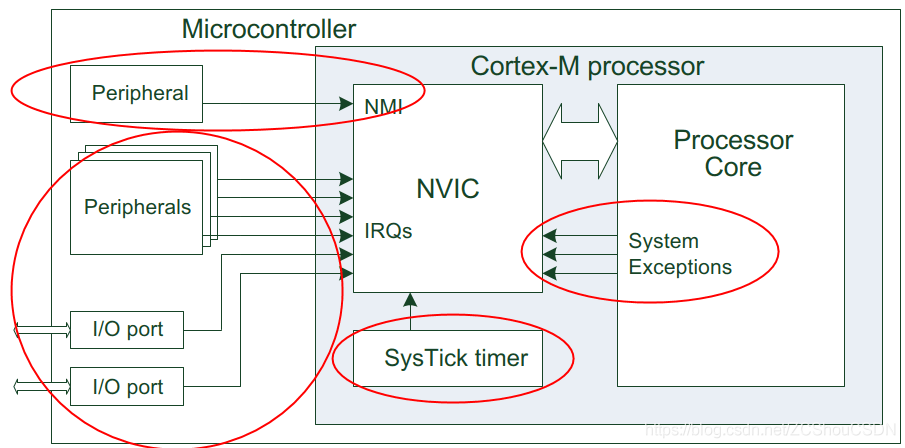
MCU 中第二層的中斷控制針對的是整個外設,這個控制來自于 Cortex-M 內核的 NVIC 模塊。如下是 NVIC 模塊寄存器列表(取自 ARMv8-M 手冊,除了 IABRn 和 ITNSn 寄存器組外,其余寄存器適用全部的 Cortex-M 家族),其中跟中斷開關相關的是 ISER 和 ICER 寄存器:
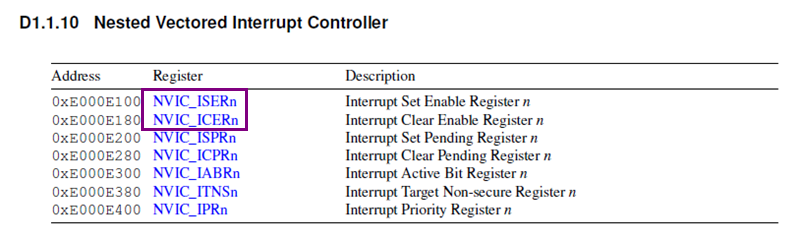
當 MCU 中某外設(比如上一節里的 GPT)被使能后,即使其內部事件中斷已被開啟,也不意味著系統中斷一定會被觸發,因為 NVIC 里對于這個外設的全局中斷開關(同一外設中所有事件共享一個系統中斷資源,即一個中斷號)還沒有開啟。ARM CMSIS 包里提供了外設全局中斷控制函數(取自 core_cm7.h 文件):
#defineNVIC_EnableIRQ__NVIC_EnableIRQ
#defineNVIC_DisableIRQ__NVIC_DisableIRQ
//開啟xx外設的全局中斷
__STATIC_INLINEvoid__NVIC_EnableIRQ(IRQn_Type IRQn)
{
if((int32_t)(IRQn)>=0)
{
__COMPILER_BARRIER();
NVIC->ISER[(((uint32_t)IRQn)>>5UL)]=(uint32_t)(1UL<uint32_t)IRQn)&0x1FUL));
__COMPILER_BARRIER();
}
}
//關閉xx外設的全局中斷
__STATIC_INLINEvoid__NVIC_DisableIRQ(IRQn_Type IRQn)
{
if((int32_t)(IRQn)>=0)
{
NVIC->ICER[(((uint32_t)IRQn)>>5UL)]=(uint32_t)(1UL<uint32_t)IRQn)&0x1FUL));
__DSB();
__ISB();
}
}
增加了使能 GPT1 的全局中斷代碼示例如下,其中 GPT1_IRQn 和 GPT1_IRQHandler 是固定名字,在 MCU 廠商提供的頭文件(MIMXRT1176_cm7.h)和啟動文件(startup_MIMXRT1176_cm7.s)里有定義。
voidperiph_int_config(void)
{
//初始化GPT1...
GPT_Init(GPT1,&gptConfig);
//...
//開啟GPT1的超時事件中斷
GPT_EnableInterrupts(GPT1,kGPT_RollOverFlagInterruptEnable);
//開啟GPT1的全局中斷
NVIC_EnableIRQ(GPT1_IRQn);
}
//GPT1的中斷響應函數
voidGPT1_IRQHandler(void)
{
GPT_ClearStatusFlags(GPT1,kGPT_RollOverFlagInterruptEnable);
//中斷業務處理代碼
}
三、系統全局中斷控制
MCU 中最頂層的中斷控制針對的是整個芯片系統,這個控制來自于 Cortex-M 內核的 CPS 指令。如下是 CPS 指令用法(取自 ARMv7-M 手冊):
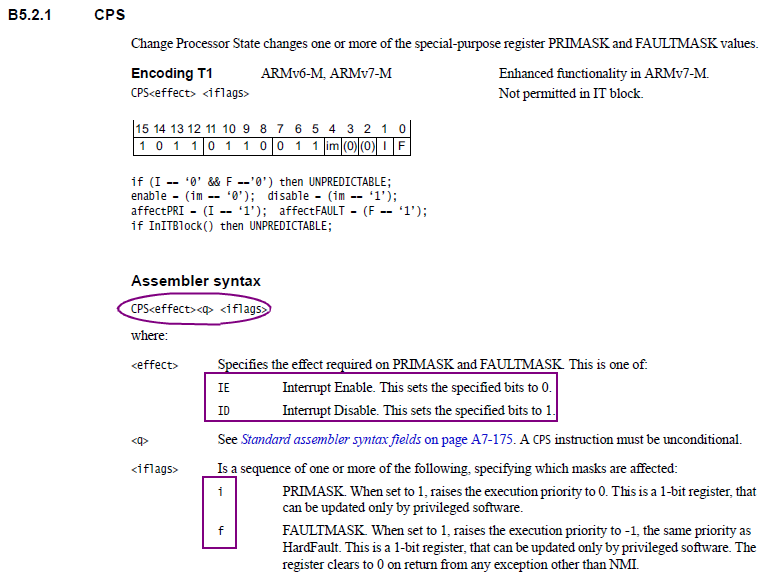
當你想對 MCU 整個芯片的所有中斷進行統一開關控制時,就必須借助 CPS 指令。一般情況下開啟芯片系統全局中斷動作在 MCU 啟動文件里已經做好了,所以在用戶代碼環境里常常不需要使能系統全局中斷的動作。如下是 IAR 環境下 i.MXRT1170 啟動文件中系統全局中斷操作,基于匯編指令實現:
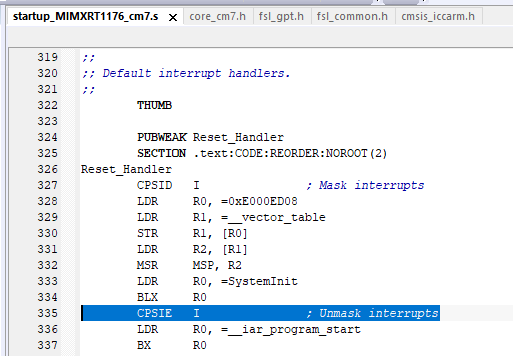
為了便于用戶在 C 代碼中操作系統全局中斷,各 IDE 下均按同樣的接口函數( __disable_irq / __enable_irq )做了封裝實現。IAR 環境見 IAR SystemsEmbedded Workbench 8.50.6armincciccarm_builtin.h 文件,但是封裝進其 Lib 了,沒有暴露源碼:
#include"iccarm_builtin.h" #define__disable_irq__iar_builtin_disable_interrupt #define__enable_irq__iar_builtin_enable_interrupt
Keil 環境見 Keil_v5ARMARMCLANGincludearm_compat.h 文件,我們可以看到源碼:
static__inline__unsignedint__attribute__((__always_inline__,__nodebug__))
__disable_irq(void){
unsignedintcpsr;
#if__ARM_ARCH>=6
#ifdefined(__ARM_ARCH_PROFILE)&&__ARM_ARCH_PROFILE=='M'
__asm__ __volatile__("mrs%[cpsr],primask
"
"cpsid i
"
:[cpsr]"=r"(cpsr));
returncpsr&0x1;
#endif
#endif
}
static__inline__void__attribute__((__always_inline__,__nodebug__))
__enable_irq(void){
#if__ARM_ARCH>=6
__asm__ __volatile__("cpsie i");
#endif
}
最終 GPT 例程里完整的三重中斷使能代碼應如下:
voidperiph_int_config(void)
{
//初始化GPT1...
GPT_Init(GPT1,&gptConfig);
//...
//開啟GPT1的超時事件中斷
GPT_EnableInterrupts(GPT1,kGPT_RollOverFlagInterruptEnable);
//開啟GPT1的全局中斷
NVIC_EnableIRQ(GPT1_IRQn);
//開啟芯片系統全局中斷
__enable_irq();
}
本文轉載自痞子衡嵌入式審核編輯:湯梓紅
-
mcu
+關注
關注
146文章
17149瀏覽量
351216 -
嵌入式
+關注
關注
5082文章
19126瀏覽量
305258 -
寄存器
+關注
關注
31文章
5343瀏覽量
120379 -
cpu
+關注
關注
68文章
10863瀏覽量
211786 -
中斷
+關注
關注
5文章
898瀏覽量
41502
原文標題:嵌入式MCU中標準的三重中斷控制設計
文章出處:【微信號:玩點嵌入式,微信公眾號:玩點嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ARM Cortex-M內核的相關資料推薦
第三方的MCU內核中,Arm Cortex M系列為什么占主導地位
干貨:對比看看Arm推出的10款Cortex-M系列MCU內核IP
國內MCU廠商90%都采用的Arm 的Cortex-M系列內核,優點在哪?
ARM Cortex-M 系列微控制器(ST)
傳統的單片機和ARM較量 助推MCU踏上高端Cortex-M市場
mcookie與單片機的關系_使用ARM Cortex-M MCU拓展單片機教學

一點理解之 CmBacktrace: ARM Cortex-M 系列 MCU 錯誤追蹤庫
分析ARM Cortex-M內核復位啟動過程
基于32位Arm Cortex-M內核N32系列MCU應用
瑞薩Cortex-M內核RA MCU的RT-Thread BSP制作教程發布





 工商網監
工商網監
評論