") 機器人和變位機怎么協(xié)調(diào)運行
機器人和變位機怎么協(xié)調(diào)運行
機器人和變位機在現(xiàn)代化工廠中扮演著重要的角色,它們之間的協(xié)調(diào)工作對于提高生產(chǎn)效率和產(chǎn)品質(zhì)量具有至關重要的作用。本文創(chuàng)想焊縫跟蹤將探討機器人和變位機如何實現(xiàn)協(xié)調(diào)工作,并介紹一些相關的應用案例。
一、機器人和變位機的基本工作原理
機器人是一種能夠自動化執(zhí)行一系列任務的機器,它們通常通過編程來實現(xiàn)各種復雜的操作,如裝配、搬運、焊接等。機器人具有高精度、高速度和高重復性的特點,能夠在惡劣的環(huán)境下進行工作,減輕了人類的工作負擔,提高了生產(chǎn)效率和質(zhì)量。
變位機是一種用于自動化生產(chǎn)中的設備,它能夠?qū)⒐ぜ囊粋€位置傳送到另一個位置,并準確地定位在指定的位置上。變位機具有高精度和高效率的特點,能夠?qū)崿F(xiàn)自動化生產(chǎn)線上的物品傳送和定位,提高了生產(chǎn)流程的靈活性和效率。
二、機器人和變位機工作的協(xié)調(diào)方式
機器人和變位機之間的協(xié)調(diào)工作對于實現(xiàn)高效和安全的生產(chǎn)至關重要。以下是一些常見的機器人和變位機協(xié)調(diào)方式:
任務分離:將機器人和變位機的任務進行分離,使它們各自獨立工作,互不干擾。例如,機器人可以負責裝配工作,而變位機則負責將工件傳送到指定的位置。
同步工作:機器人和變位機可以同步工作,即當機器人執(zhí)行任務時,變位機可以同時進行工件的傳送和定位工作。這種協(xié)調(diào)方式可以提高生產(chǎn)效率,但需要確保機器人和變位機的動作不會發(fā)生沖突。
安全保障:為了確保機器人和變位機之間的安全協(xié)調(diào),需要采取一系列安全措施,如設置安全屏障、使用傳感器檢測機器人和變位機的位置等。
三、機器人和變位機協(xié)同的挑戰(zhàn)和解決方案
機器人和變位機之間的協(xié)調(diào)工作面臨著一些挑戰(zhàn),例如它們的工作速度和靈活性不同,機器人在不同的位置和方向上進行操作,而變位機需要準確地傳送物品到特定的位置。為了解決這些挑戰(zhàn),可以采取以下措施:
精準的編程和定位系統(tǒng):通過高精度的編程和定位系統(tǒng),可以確保機器人和變位機的動作準確無誤。例如,使用激光雷達技術可以實現(xiàn)高精度的物品定位和識別。
使用智能硬件:通過使用智能硬件,如傳感器、控制器等,可以實時監(jiān)測機器人和變位機的位置和狀態(tài),避免發(fā)生沖突和碰撞。
人工干預:在一些復雜的生產(chǎn)流程中,可能需要人工干預來協(xié)調(diào)機器人和變位機的工作。例如,在裝配過程中,人工可以監(jiān)控機器人的操作,并在需要時進行手動調(diào)整。
四、結(jié)論
機器人和變位機之間的協(xié)調(diào)工作對于提高生產(chǎn)效率和產(chǎn)品質(zhì)量具有重要意義。通過任務分離、同步工作和安全保障等協(xié)調(diào)方式,以及精準的編程和定位系統(tǒng)、使用智能硬件和人工干預等措施,可以更好地實現(xiàn)機器人和變位機的協(xié)同工作,推動工業(yè)自動化水平的提高。同時,隨著工業(yè)4.0和智能制造的不斷發(fā)展,機器人和變位機之間的協(xié)調(diào)工作將更加智能化、高效化和自動化。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28437瀏覽量
207175
發(fā)布評論請先 登錄
相關推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
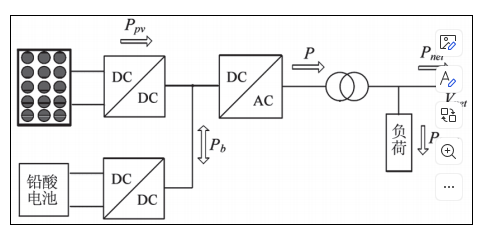
光伏發(fā)電系統(tǒng)與儲能裝置的協(xié)調(diào)運行分析
柔性機器人和剛性機器人有什么區(qū)別?

工業(yè)機器人和機械臂的設計、功能和應用有哪些區(qū)別?
深度剖析:MT6816 磁編碼 IC 在機器人焊接變位機中的應用
柔性機器人與剛性機器人區(qū)別與聯(lián)系







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論