") 單關(guān)節(jié)機(jī)械臂接觸力補(bǔ)償因素
單關(guān)節(jié)機(jī)械臂接觸力補(bǔ)償因素
具有單軸力傳感器的單關(guān)節(jié)機(jī)械臂接觸力估計(jì):
接觸力估計(jì)需要考慮多個(gè)因素進(jìn)行補(bǔ)償,以提高估計(jì)的準(zhǔn)確性。以下是一些常見的補(bǔ)償因素:
1.重力補(bǔ)償:機(jī)械臂在接觸過程中會(huì)受到重力的影響,因此需要對(duì)測量到的力進(jìn)行重力補(bǔ)償。通過減去機(jī)械臂當(dāng)前位置的重力分量,可以獲得實(shí)際的接觸力。
2.慣性補(bǔ)償:機(jī)械臂在運(yùn)動(dòng)過程中可能會(huì)產(chǎn)生慣性力,這些力會(huì)影響接觸力的測量。通過考慮機(jī)械臂的加速度和速度信息,可以進(jìn)行慣性補(bǔ)償,以消除不必要的測量誤差。
3.摩擦補(bǔ)償:在接觸過程中,摩擦力會(huì)干擾力的測量。通過估計(jì)和補(bǔ)償摩擦力,可以得到更準(zhǔn)確的接觸力信息。
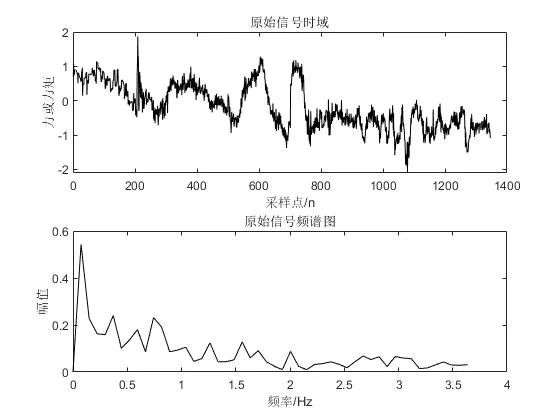
4.噪聲補(bǔ)償:傳感器可能會(huì)受到環(huán)境噪聲的影響,這些噪聲會(huì)對(duì)接觸力的測量結(jié)果產(chǎn)生干擾。使用濾波技術(shù)或噪聲模型,可以對(duì)傳感器數(shù)據(jù)進(jìn)行濾波或去噪,以減小噪聲對(duì)接觸力估計(jì)的影響。
以上是一些常見的補(bǔ)償因素,具體的實(shí)現(xiàn)方法會(huì)根據(jù)機(jī)械臂和傳感器的特性而有所不同。
在接觸力估計(jì)的實(shí)際應(yīng)用中,還需要考慮到系統(tǒng)的動(dòng)態(tài)特性、傳感器的校準(zhǔn)和精度等因素,以獲得更精確和可靠的接觸力估計(jì)結(jié)果。
數(shù)據(jù)分析:對(duì)采集到的數(shù)據(jù)進(jìn)行分析,以確定需要進(jìn)行的補(bǔ)償方案。以下是一些分析方法和指標(biāo):
重力補(bǔ)償:分析機(jī)械臂在不同位置和姿態(tài)下的重力分量,計(jì)算出重力對(duì)接觸力的影響。可以通過測量機(jī)械臂的姿態(tài)角度和質(zhì)量分布等信息來估計(jì)重力分量。
慣性補(bǔ)償:分析機(jī)械臂在不同加速度和速度下的慣性力,計(jì)算出慣性力對(duì)接觸力的影響。可以通過測量機(jī)械臂的加速度和速度,結(jié)合機(jī)械臂的慣性參數(shù)來估計(jì)慣性力。
摩擦補(bǔ)償:分析機(jī)械臂在接觸過程中的摩擦力特性,計(jì)算出摩擦力對(duì)接觸力的影響。可以通過測量機(jī)械臂的運(yùn)動(dòng)阻力和摩擦系數(shù)等信息來估計(jì)摩擦力。
噪聲補(bǔ)償:分析傳感器輸出的噪聲特性,確定噪聲對(duì)接觸力估計(jì)的影響程度。可以通過統(tǒng)計(jì)分析、濾波技術(shù)或噪聲模型來進(jìn)行噪聲補(bǔ)償。
在只有角編碼器和單軸力矩傳感器的情況下,可以通過以下方式進(jìn)行接觸力估計(jì)的補(bǔ)償:
1.重力補(bǔ)償:
角編碼器測量角度:使用角編碼器測量機(jī)械臂關(guān)節(jié)的角度。根據(jù)角度和機(jī)械臂的幾何結(jié)構(gòu),可以估計(jì)出機(jī)械臂在不同位置和姿態(tài)下的重力分量。
機(jī)械臂質(zhì)量估計(jì):通過對(duì)機(jī)械臂的質(zhì)量進(jìn)行測量或估計(jì),結(jié)合機(jī)械臂幾何結(jié)構(gòu),可以估計(jì)出機(jī)械臂的質(zhì)量分布。根據(jù)質(zhì)量分布和重力加速度的方向,可以計(jì)算出不同位置和姿態(tài)下的重力對(duì)接觸力的影響。
2.慣性補(bǔ)償:
角編碼器測量角速度:利用角編碼器測量機(jī)械臂關(guān)節(jié)的角速度。通過積分角速度,可以獲得機(jī)械臂的角度變化。結(jié)合機(jī)械臂的慣性參數(shù),可以估計(jì)機(jī)械臂在不同加速度和速度下的慣性力。
3.摩擦補(bǔ)償:
力矩傳感器測量力矩:使用單軸力矩傳感器測量機(jī)械臂關(guān)節(jié)的力矩。根據(jù)關(guān)節(jié)力矩和摩擦系數(shù),可以估計(jì)機(jī)械臂在接觸過程中的摩擦力特性。
4.噪聲補(bǔ)償:
濾波技術(shù):對(duì)傳感器輸出的接觸力數(shù)據(jù)進(jìn)行濾波處理,以減小噪聲的影響。可以使用數(shù)字濾波器,例如低通濾波器或卡爾曼濾波器等,來抑制高頻噪聲成分。
校準(zhǔn)和校正:對(duì)傳感器進(jìn)行校準(zhǔn)和校正,以降低系統(tǒng)誤差和噪聲。可以使用校準(zhǔn)算法和技術(shù),例如零偏校準(zhǔn)和靈敏度校準(zhǔn),來提高傳感器的準(zhǔn)確性。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51104瀏覽量
753610 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28419瀏覽量
207109 -
機(jī)械臂
+關(guān)注
關(guān)注
12文章
515瀏覽量
24588
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
做畢設(shè),需要用2812控制由舵機(jī)組成的三關(guān)節(jié)機(jī)械臂,求助
【智能控制】機(jī)械手參數(shù)辨識(shí)——雙關(guān)節(jié)機(jī)械臂動(dòng)力學(xué)方程
如何對(duì)機(jī)械臂的關(guān)節(jié)速度進(jìn)行動(dòng)態(tài)繪圖?
機(jī)械臂的相關(guān)資料分享
機(jī)械臂的控制學(xué)習(xí)
【智能控制】機(jī)械手參數(shù)辨識(shí)——雙關(guān)節(jié)機(jī)械臂動(dòng)力學(xué)方程ppt下載
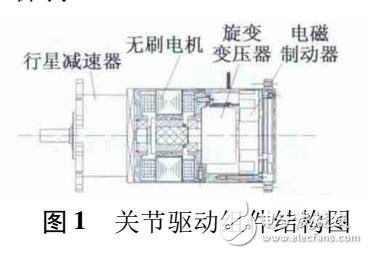
機(jī)械臂關(guān)節(jié)驅(qū)動(dòng)組件
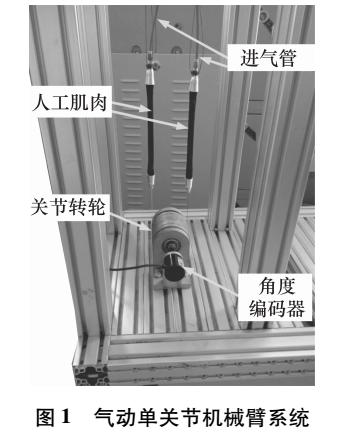
氣動(dòng)人工肌肉機(jī)械臂的自抗擾控制
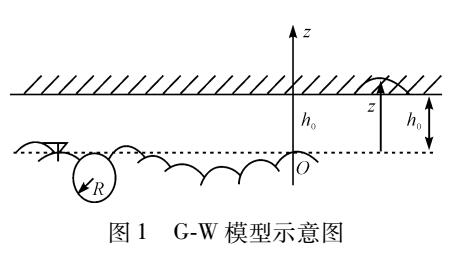
軟固結(jié)磨粒群接觸力分析
機(jī)械臂動(dòng)力學(xué)模型學(xué)習(xí)

Mycobot機(jī)械臂各關(guān)節(jié)的運(yùn)動(dòng)(三)
力控機(jī)器人接觸力濾波與估計(jì)
如何實(shí)現(xiàn)對(duì)機(jī)器人接觸力的數(shù)據(jù)濾波
機(jī)器臂柔順控制初步分析
接觸力對(duì)120A250A大電流接線端子有哪些影響






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論