 如何實現對機器人接觸力的數據濾波
如何實現對機器人接觸力的數據濾波
下面舉一些例子,實現對機器人接觸力的數據濾波!
首先是導入數據:
clc
clear all;
close all;
X = xlsread('E:程序test~六維力數據.csv');%導入數據
A=X(:,1);B=X(:,2);C=X(:,3);D=X(:,4);E=X(:,5);F=X(:,6);%提取力數據
%% 濾波
x=A;
N=1347; %時域點數
fs = 100; % 重采樣頻率
T = 1/fs; % 周期
n = 5; % 1Hz頻率被分成n段
% N = fs*n; % 因為1Hz頻率被分成了n段,所以頻譜的x軸數組有fs*n個數
f = (0: N-1)*fs/N; % 將fs個頻率細分成fs*n個(即原來是[0, 1, 2, …, fs],現在是[0, 1/N, 2/N, …, (N-1)*fs/N])
t = (0: N-1)*T; % 信號所持續的時長(N個周期)
nHz = 10; % 畫的頻譜的橫坐標到nHz
Hz = nHz*n; % 畫的頻譜的橫坐標的數組個數
%% 繪制原始信號時頻圖
figure
subplot(211),plot(x,'k'),title('原始信號時域'),xlabel('采樣點/n'),ylabel('力或力矩'); % 繪制原始信號時域
fx = abs(fft(x-mean(x)))/(N/2); % 傅里葉變換
subplot(212),plot(f(1:Hz), fx(1:Hz),'k'),title('原始信號頻譜圖'),xlabel('頻率/Hz'),ylabel('幅值'); % 繪制原始信號頻域
可以得到如下結果:
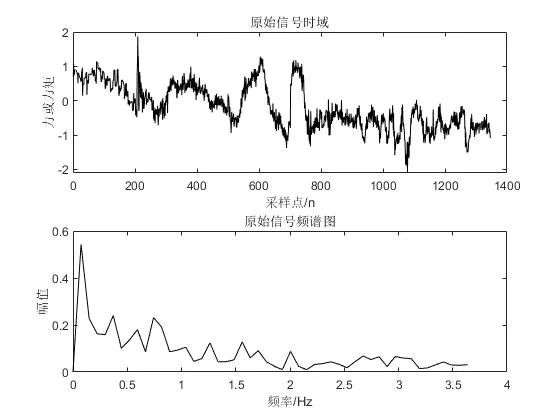
通過傅里葉變換可以得到接觸力信號頻域上的內容。
進行低通濾波處理:
%% 低通濾波
fc = 20;
Wc = 2*fc/fs;
[b,a] = butter(2,Wc,'low'); % 四階的巴特沃斯低通濾波,保留頻率低于fc的振動
fprintf('a = %6.18fn',a);
fprintf('b = %6.18fn',b);
x1 = filter(b,a,x);
figure
subplot(211),plot(x1,'b'),title('低通濾波信號時域圖'),xlabel('采樣點/n'),ylabel('力或力矩');
fx = abs(fft(x1-mean(x1)))/(N/2); % 傅里葉變換
subplot(212),plot(f(1:Hz), fx(1:Hz),'b'),title('低通濾波信號頻譜圖'),xlabel('頻率/Hz'),ylabel('幅值'); % 繪制原始信號頻域
Butterworth digital and analog filter design:
function varargout = butter(n, Wn, varargin)
narginchk(2,4);
if coder.target('MATLAB')
[varargout{1:nargout}] = butterImpl(n,Wn,varargin{:});
else
allConst = coder.internal.isConst(n) && coder.internal.isConst(Wn);
for ii = 1:length(varargin)
allConst = allConst && coder.internal.isConst(varargin{ii});
end
if allConst && coder.internal.isCompiled
[varargout{1:nargout}] = coder.const(@feval,'butter',n,Wn,varargin{:});
else
[varargout{1:nargout}] = butterImpl(n,Wn,varargin{:});
end
end
end
function varargout = butterImpl(n,Wn,varargin)
inputArgs = cell(1,length(varargin));
if nargin > 2
[inputArgs{:}] = convertStringsToChars(varargin{:});
else
inputArgs = varargin;
end
validateattributes(n,{'numeric'},{'scalar','real','integer','positive'},'butter','N');
validateattributes(Wn,{'numeric'},{'vector','real','finite','nonempty'},'butter','Wn');
[btype,analog,~,msgobj] = iirchk(Wn,inputArgs{:});
if ~isempty(msgobj)
coder.internal.error(msgobj.Identifier,msgobj.Arguments{:});
end
% Cast to enforce precision rules
n1 = double(n(1));
coder.internal.errorIf(n1 > 500,'signal:butter:InvalidRange')
% Cast to enforce precision rules
Wn = double(Wn);
% step 1: get analog, pre-warped frequencies
fs = 2;
if ~analog
u = 2*fs*tan(pi*Wn/fs);
else
u = Wn;
end
% step 2: Get N-th order Butterworth analog lowpass prototype
[zs,ps,ks] = buttap(n1);
% Transform to state-space
[a,b,c,d] = zp2ss(zs,ps,ks);
% step 3: Transform to the desired filter
if length(Wn) == 1
% step 3a: convert to low-pass prototype estimate
Wn1 = u(1);
Bw = []; %#ok< NASGU >
% step 3b: Transform to lowpass or high pass filter of desired cutoff
% frequency
if btype == 1 % Lowpass
[ad,bd,cd,dd] = lp2lp(a,b,c,d,Wn1);
else % btype == 3 % Highpass
[ad,bd,cd,dd] = lp2hp(a,b,c,d,Wn1);
end
else % length(Wn) is 2
% step 3a: convert to low-pass prototype estimate
Bw = u(2) - u(1); % center frequency
Wn1 = sqrt(u(1)*u(2));
% step 3b: Transform to bandpass or bandstop filter of desired center
% frequency and bandwidth
if btype == 2 % Bandpass
[ad,bd,cd,dd] = lp2bp(a,b,c,d,Wn1,Bw);
else % btype == 4 % Bandstop
[ad,bd,cd,dd] = lp2bs(a,b,c,d,Wn1,Bw);
end
end
% step 4: Use Bilinear transformation to find discrete equivalent:
if ~analog
[ad,bd,cd,dd] = bilinear(ad,bd,cd,dd,fs);
end
if nargout == 4 % Outputs are in state space form
varargout{1} = ad; % A
varargout{2} = bd; % B
varargout{3} = cd; % C
varargout{4} = dd; % D
else
p = eig(ad);
[z,k] = buttzeros(btype,n1,Wn1,analog,p+0i);
if nargout == 3 % Transform to zero-pole-gain form
varargout{1} = z;
varargout{2} = p;
varargout{3} = k;
else
den = real(poly(p));
num = [zeros(1,length(p)-length(z),'like',den) k*real(poly(z))];
varargout{1} = num;
varargout{2} = den;
end
end
end
function [z,k] = buttzeros(btype,n,Wn,analog,p)
% This internal function computes the zeros and gain of the ZPK
% representation. Wn is scalar (sqrt(Wn(1)*Wn(2)) for bandpass/stop).
if analog
% for lowpass and bandpass, don't include zeros at +Inf or -Inf
switch btype
case 1 % lowpass: H(0)=1
z = zeros(0,1,'like',p);
k = Wn^n; % prod(-p) = Wn^n
case 2 % bandpass: H(1i*Wn) = 1
z = zeros(n,1,'like',p);
k = real(prod(1i*Wn-p)/(1i*Wn)^n);
case 3 % highpass: H(Inf) = 1
z = zeros(n,1,'like',p);
k = 1;
case 4 % bandstop: H(0) = 1
z = 1i*Wn*((-1).^(0:2*n-1)');
k = 1; % prod(p) = prod(z) = Wn^(2n)
otherwise
coder.internal.error('signal:iirchk:BadFilterType','high','stop','low','bandpass');
end
else
Wn = 2*atan2(Wn,4);
switch btype
case 1 % lowpass: H(1)=1
z = -ones(n,1,'like',p);
k = real(prod(1-p))/2^n;
case 2 % bandpass: H(z) = 1 for z=exp(1i*sqrt(Wn(1)*Wn(2)))
z = [ones(n,1,'like',p); -ones(n,1,'like',p)];
zWn = exp(1i*Wn);
k = real(prod(zWn-p)/prod(zWn-z));
case 3 % highpass: H(-1) = 1
z = ones(n,1,'like',p);
k = real(prod(1+p))/2^n;
case 4 % bandstop: H(1) = 1
z = exp(1i*Wn*( (-1).^(0:2*n-1)' ));
k = real(prod(1-p)/prod(1-z));
otherwise
coder.internal.error('signal:iirchk:BadFilterType','high','stop','low','bandpass');
end
end
% Note: codegen complains when z set to both real and complex values above
if ~any(imag(z))
z = real(z);
end
end
可以得到濾波后的接觸力數據:

為了更詳細的進行原始數據與濾波后的數據進行對比,接下來以幾種不同形式的濾波方式進行對比。
原始接觸力數據:

移動平均濾波
b = [1 1 1 1 1 1]/6;
x11 = filter(b,1,x);

很明顯,去除噪聲的效果較為突出!
接下來采用中值濾波:

中值濾波的效果相比于移動平均濾波有改善。
接下來進行維納濾波:
Rxx=xcorr(x, x); %得到混合信號的自相關函數
M=100; %維納濾波器階數
for i=1:M
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N); %得到混合信號的自相關矩陣
end
end
Rxy=xcorr(x,x1); %(此處x1為中值信號濾波后效果,原信號不存在)得到混合信號和原信號的互相關函數
for i=1:M
rxy(i)=Rxy(i+N-1); %得到混合信號和原信號的互相關向量
end
h = inv(rxx)*rxy'; %得到所要涉及的wiener濾波器系數
x1=filter(h,1, x); %將輸入信號通過維納濾波器

但維納濾波的效果沒有前面兩個濾波算法的效果好,需要進一步整定參數。
下面進行自適應濾波:
k=100; %時域抽頭LMS算法濾波器階數
u=0.001; %步長因子
%設置初值
x1=zeros(1,N); %output signal
x1(1:k)=x(1:k); %將輸入信號SignalAddNoise的前k個值作為輸出yn_1的前k個值
w=zeros(1,k); %設置抽頭加權初值
e=zeros(1,N); %誤差信號
%用LMS算法迭代濾波
for i=(k+1):N
XN=x((i-k+1):(i));
XN=XN';
x1(i)=w*XN';
e(i)=x11(i)-x1(i);%不存在原信號,此處換為平均濾波后的時域波形
w=w+2*u*e(i)*XN;
end

四階的巴特沃斯低通濾波:
Wc=2*3/fs; %截止頻率 3Hz
[b,a]=butter(4,Wc,'low'); % 四階的巴特沃斯低通濾波
x1=filter(b,a,x);

二階的巴特沃斯帶通濾波:
Wc1=2*1/fs; %下截止頻率 1Hz
Wc2=2*6/fs; %上截止頻率 6Hz
[b,a]=butter(2,[Wc1, Wc2],'bandpass'); % 二階的巴特沃斯帶通濾波
x1=filter(b,a,x);

需要生成濾波器時,可以使用matlab中自帶的工具。filterDesigner
利用這個工具,可以將設計的濾波器保存成一個函數。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28423瀏覽量
207139 -
濾波
+關注
關注
10文章
667瀏覽量
56649 -
數據
+關注
關注
8文章
7035瀏覽量
89045
發布評論請先 登錄
相關推薦
nao機器人與其他機器人的區別
機器人在之前的機器人的基礎上,加入了可以自由便捷的運動功能,兩個攝像頭精準拍攝、全方位的視覺功能,還有一個超聲傳感器功能。傳感器可以識別人類和NAO機器人的接觸,從而做些動作和人類互動
發表于 02-13 15:43
機器人彈鋼琴,實現難度如何?
鋼琴曲目的機器人,只需要它實現能彈奏曲目。因為現在剛剛接觸機器人制作方面,只懂一些中斷和舵機啥的,不知道做成的難度有多大,,,,希望各位前輩能夠不舍賜教。如果能做成,都需要
發表于 05-22 17:06
機器人彈鋼琴
鋼琴曲目的機器人,只需要它實現能彈奏曲目。因為現在剛剛接觸機器人制作方面,只懂一些中斷和舵機啥的,不知道做成的難度有多大,,,,希望各位前輩能夠不舍賜教。如果能做成,都需要
發表于 05-22 17:09
機器人的眼睛和大腦:智能化光電傳感器
的檢測。較高的研發費用是一直沒有成功實現相對滑移直接檢測技術工業化應用的主要原因。 與現在建議使用的方案不同,在IITB霍倫霍夫研究所中研發成功的光學傳感器能夠直接對相對滑移進行檢測。結合接觸力檢測
發表于 11-06 10:52
軟固結磨粒群接觸力分析
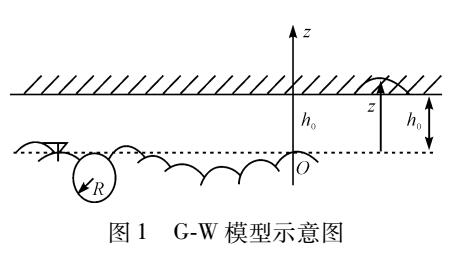
針對激光強化模具白由曲面的光整加工問題,對軟固結磨粒群氣壓砂輪與模具表面接觸力、下壓量進行了研究,對砂輪接觸模具表面時的磨粒姿態進行了分析,提出了一種基于GW接觸模型構建了軟固結磨粒群接觸力
發表于 03-16 16:19
?0次下載
機器人力控的性能指標有哪些
在機器人的操作任務中,處理機器人和環境之間的物理接觸是非常重要的。 由于機器人系統的復雜性和不確定性,純運動控制往往是不夠的,因為即使是最精確的模型也無法完全準確地預測所有可能的情況。
機器人阻抗控制有幾種方法
在工業機器人中,阻抗控制是一種非常重要的控制方法,主要用于控制機器人的力和位。通過調整阻抗,機器人可以更好地適應不同的操作環境和任務需求。 阻抗控制的基本思路是:建立一個期望的機器人位
力控機器人接觸力濾波與估計
力控機器人本身關節具有力傳感器,可為什么還需要接觸力濾波和估計呢?這是不是有些多余?顯然是不是的,本篇博文總結下力控機器人接觸力
單關節機械臂接觸力補償因素
具有單軸力傳感器的單關節機械臂接觸力估計: 接觸力估計需要考慮多個因素進行補償,以提高估計的準確性。以下是一些常見的補償因素: 1.重力補償:機械臂在接觸過程中會受到重力的影響,因此需要對測量到的力
機器臂柔順控制初步分析
為實現與環境的安全、柔順交互,需要將機器人期望動力學行為與接觸環境所表現出來的特征進行匹配。定性地分析來看: 對于高剛度接觸環境,期望機器臂
柔性觸覺傳感器或將在人形機器人時代大放異彩
近日,開源證券發布研究報告稱,柔性觸覺傳感器又稱為“電子皮膚”,能夠實現與環境接觸力、溫度、濕度、震動、材質、軟硬等特性的監測,是機器人直接感知環境作用的重要傳感器,有助于智能化的人形機器人
接觸力對120A250A大電流接線端子有哪些影響
德索工程師說道在電子連接技術中,接觸力是確保電力傳輸穩定性和效率的關鍵因素。特別是在120A250A大電流接線端子的應用上,適當的接觸力可以防止連接失敗和電阻增加,這對于保障設備的安全運行重要。然而,接觸力的大小并非一成不變,其






 工商網監
工商網監
評論