 基于CANoe的高性能測試系統解決方案
基于CANoe的高性能測試系統解決方案
隨著對于汽車功能性、安全性、舒適性等需求的日益增長,汽車上的ECU功能也變得越來越強大。部分ECU開始采用多核處理器,需要處理多個通信系統并執行復雜的控制算法,一些應用對實時性能有著極高的要求。與此同時,多總線通信的需求日益增長,通信數據量也逐步增多。這樣的趨勢導致測試系統對于測試工具性能的要求也隨之提高。為了滿足這些需求,除了配置高性能電腦外,CANoe也提供多種解決方案供用戶選擇,以應對不同的應用場景。
01VTP設備
VTP(Vector Tool Platform)設備中內置處理器以及操作系統,并可通過連接網絡接口卡進行總線通信。VTP設備與上位機之間通過USB或網線連接,上位機通過CANoe自帶的VTP或是獨立的Vector Platform Manager工具即可與VTP設備進行交互,如連接、配置、控制、數據傳輸等。在VTP設備上,由于受第三方軟件的影響較少,系統擁有更高的定時器精度和更低的延遲。VTP設備在分布式模式(Distributed Mode)下僅運行CANoe的Runtime Kernel,可減少分析窗口和圖形系統對實時部分的影響,特別適用于對實時性能要求較高的應用場景。此外,部分VTP設備還額外支持擴展實時模式(Extended Real Time Mode),包含額外的實時操作系統用于執行實時任務,可進一步改善定時器精度和延遲,提升系統的整體性能。
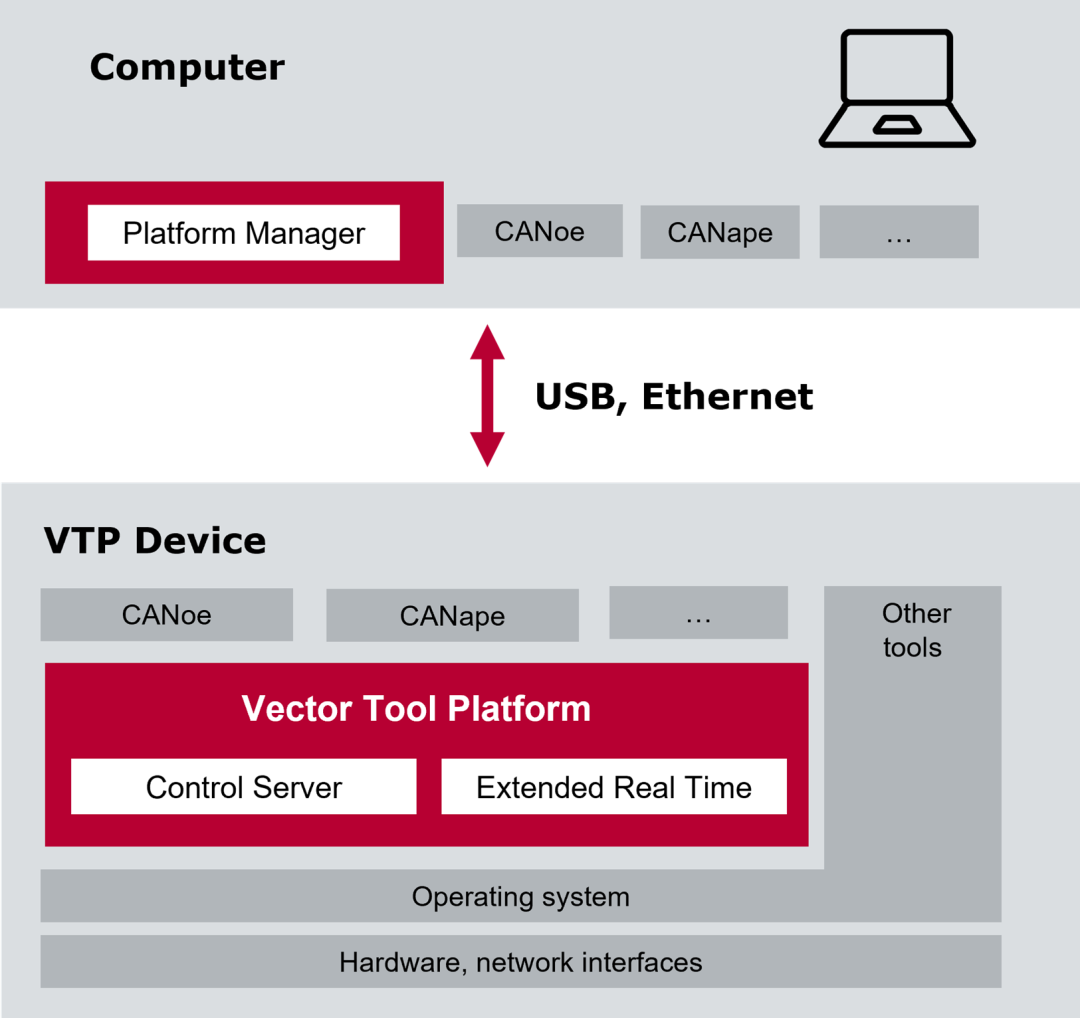
圖1 VTP設備
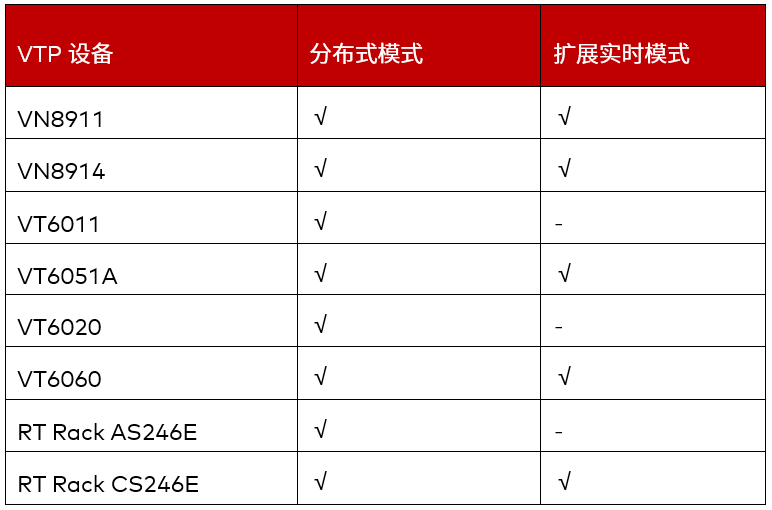
目前常用的VTP設備及各自支持的運行模式如下:
分布式模式
為了解耦實時操作,CANoe可拆分為分析部分和仿真執行部分。前者用于執行分析功能以及相關GUI的顯示,后者則是CANoe的Runtime Kernel,用于執行仿真和測試功能。通常情況下,用戶會采用PC+硬件接口卡的連接方式,此時這兩部分都運行在同一臺電腦上,稱為接口卡模式(Interface Mode),如圖2所示。如果采用PC+VTP設備+硬件接口卡的連接方式,則可讓分析和仿真分別運行在不同的設備上,其中上位機僅運行分析部分,仿真部分在VTP設備上運行,這就是分布式模式(圖3)。
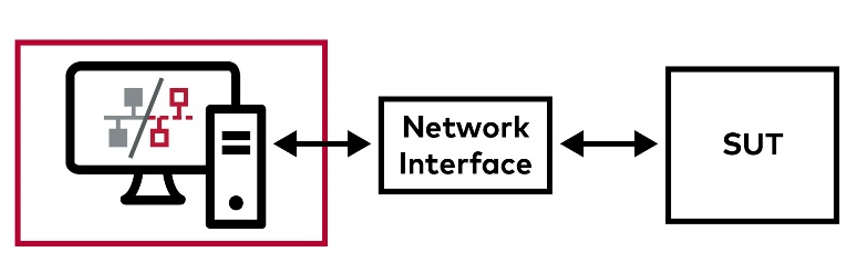
圖2 接口卡模式
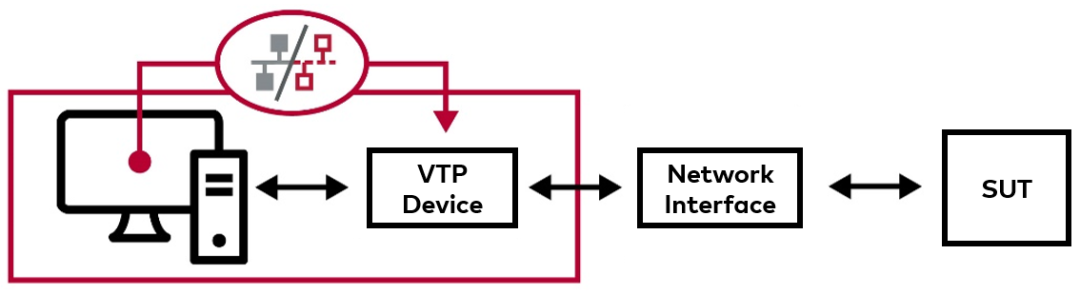
圖3 分布式模式
擴展實時模式
擴展實時模式下,VTP設備內部會分為兩個邏輯區域,一個用于常規仿真測試的執行,另一個用于實時任務的執行,可大幅提高實時性能,如下圖所示。擴展實時模式可在實時條件下執行CAPL程序和MATLAB仿真模型,此時程序和模型的執行間隔可達到微秒級。此外,部分CAN/CAN FD總線接口卡也支持搭配VTP設備工作在擴展實時模式下,在仿真發送短周期報文時擁有更穩定的表現。擴展實時模式下,用戶也可以使用VT板卡實現對I/O信號的讀寫,可對測量值進行更高頻率的采樣,傳輸周期可低至200μs。
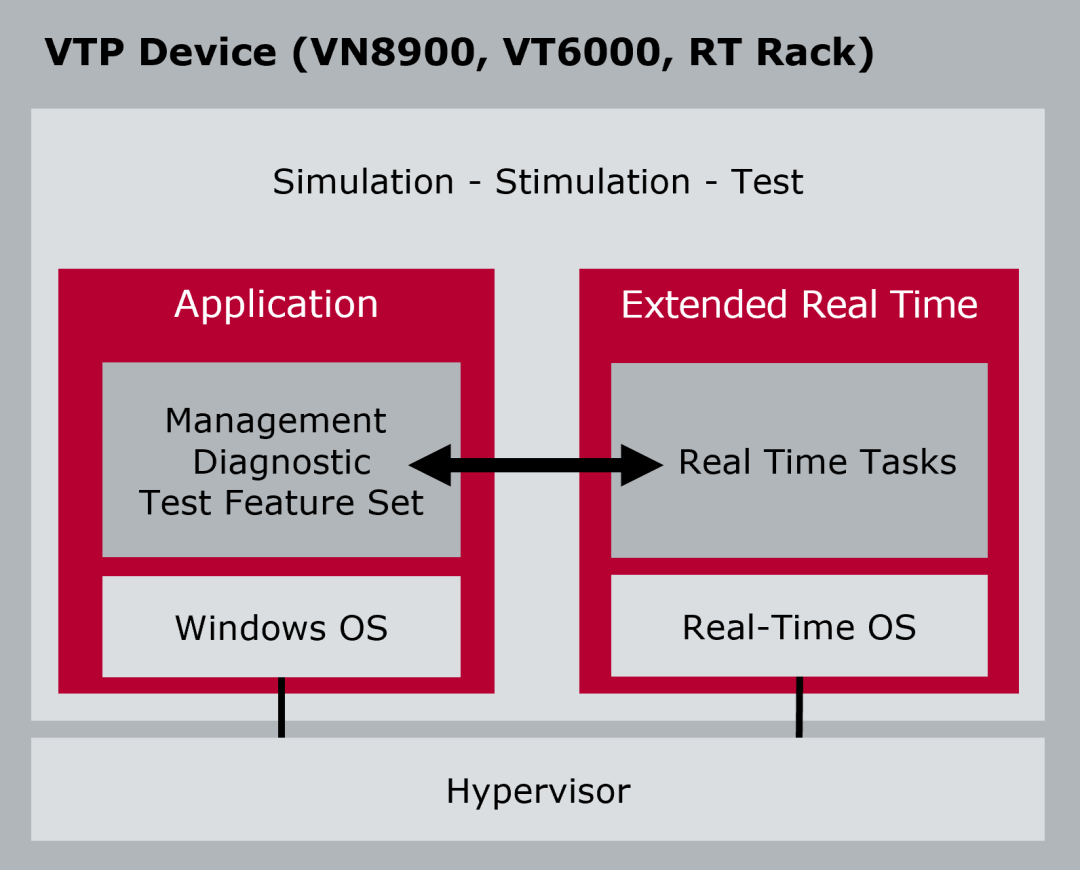
圖4 擴展實時模式
02Multi CANoe
如果使用一臺計算機以及配合VTP設備仍然無法滿足仿真、分析和測試任務對性能的需求,另一種解決方案是切換到Multi CANoe環境。即將一個CANoe工程拆分成多個不同的實例,運行在同一臺或多臺計算機上,從而充分利用多核處理器以及多臺計算機的資源。任務可以按需分配到不同的Multi CANoe實例中,每個CANoe實例均有自己的用戶界面和Runtime Kernel,CANoe實例之間可通過自動建立的FDX(Fast Data Exchange)連接進行數據交換。
所有CANoe實例中會有一個作為Master,其他則充當Slave。僅Master需要CANoe Pro/Run的License,Slave端使用價格更低的CANoe Slave License即可。作為Master的CANoe實例可以控制所有實例的運行,通過同步線及同步盒的連接,可使不同CANoe實例使用的接口卡設備之間實現時戳同步。
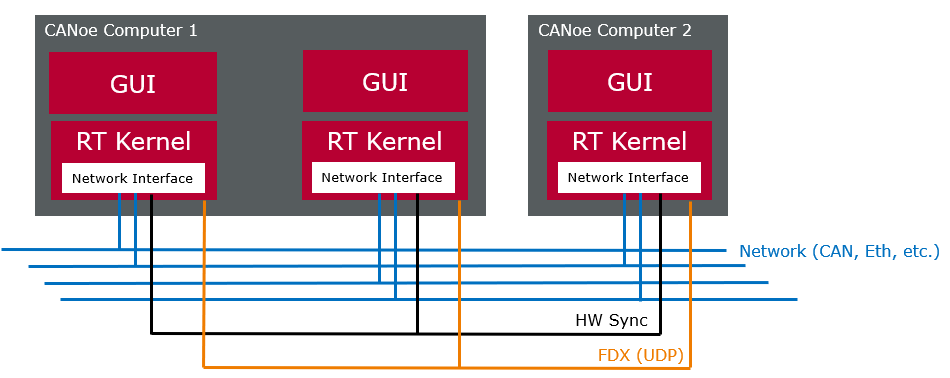
圖5 Multi CANoe環境
運行同步
任意Multi CANoe實例嘗試啟動工程時,都會向Master發送Start請求。Master隨后將Start命令發送給所有Multi CANoe實例,它們在收到Master的Start命令后都會啟動各自的工程,并將狀態反饋給Master。在此期間,CANoe實例處于準備運行狀態,但并不會處理任何事件。當Master檢測到所有CANoe實例都反饋了準備啟動狀態后,會通過硬件同步線發送同步脈沖作為所有實例的初始時戳0,此后CANoe實例才會正式啟動并開始處理事件,從而實現所有CANoe實例的同步運行。
時間同步
不同CANoe實例使用的總線通信硬件接口卡通常都是不一樣的,接口卡之間可以通過同步線或是同步盒連接來實現時間同步。作為Time Master的接口卡會從同步口發出同步脈沖,其他接口卡通過檢測該脈沖實現同步。接口卡數量越多,傳輸同步脈沖耗費的時間就越長,脈沖的跳變沿質量也越差,這種情況下可以使用主動同步盒(Multi SYNCbox Active)進行補償,通過驅動10個有源輸出來放大傳入的同步脈沖,確保10個輸出脈沖的發送時間之間幾乎不會存在偏移,并且輸出相對輸入的延遲是恒定的,可在測量后在CANoe的配置文件(can.ini)中設置,以便進行補償。
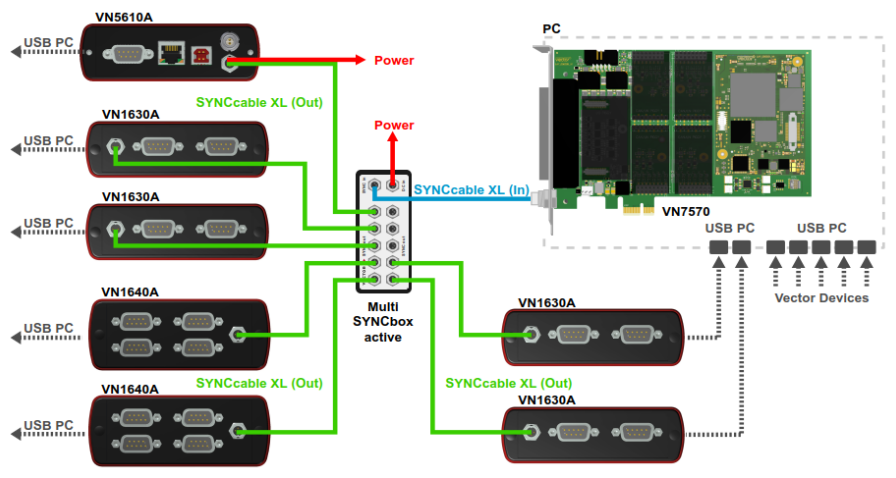
圖6 基于Multi SYNCbox Active的時間同步
03測試配置示例
目前,汽車電子電氣架構正在向集中化和區域化的趨勢轉變,高性能計算機(HPC)和區域控制器(ZCU)也將扮演越來越重要的角色。在對HPC/ZCU進行測試的過程中,需要用到的CAN/CANFD、LIN、Ethernet等總線通道的數量較多,每個總線通道上需要仿真的環境或使用的模型都可能很復雜,傳輸的數據量通常也非常巨大。此時,在一臺電腦上運行所有的仿真很可能會遇到性能瓶頸。對于這種場景,用戶可以考慮將Multi CANoe與VTP設備結合使用,根據實際的復雜度將工程分解為合適數量的CANoe實例,分別運行在不同的VTP設備或PC中,從而滿足HPC/ZCU等復雜控制器的仿真測試需求。
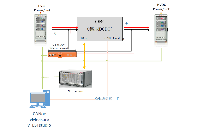
下圖展示了一個測試配置的示例,整個測試工程被拆分成4個CANoe實例,其中實例CANoe1運行在VTP設備(RT Rack1)上,連接多塊VN7572用于多路CAN/CAN FD/LIN總線通信,外接的上位機PC1用于運行CANoe1的分析部分;實例CANoe2和實例CANoe3運行在同一臺工控機IPC2上,分別使用VN1531和VN5650用于CAN/CAN FD和Ethernet通信;實例CANoe4運行在一臺單獨的工控機IPC3上,連接VN5650專門用于Ethernet通信。
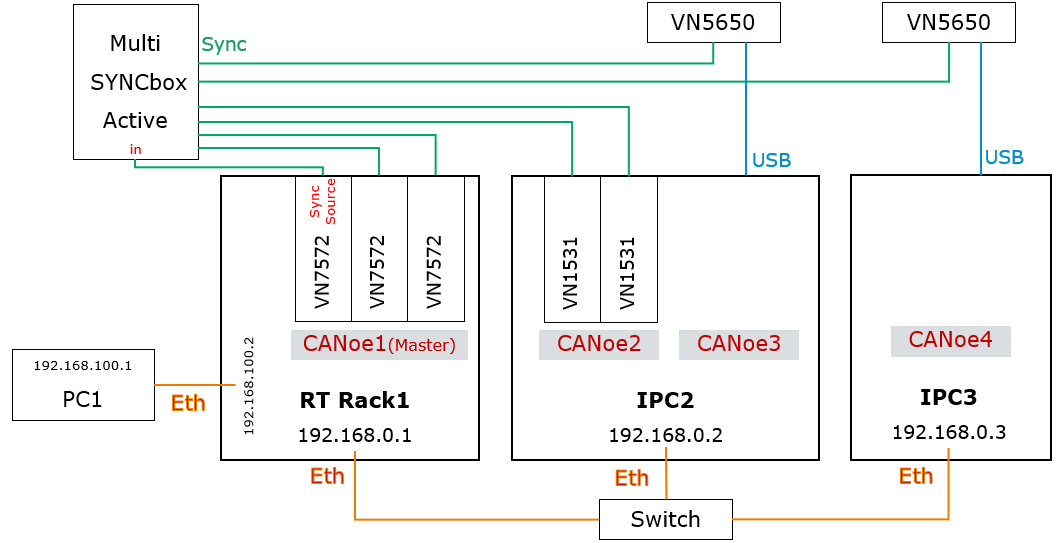
圖7 測試配置示例
04展望
CANoe架構一直在不斷的優化和升級,CANoe版本及服務包的每次更新,都伴隨著性能的顯著提升。以Ethernet通信為例,在復雜工程中進行大量數據交互的場景中,CANoe17相較CANoe15已實現了超過3倍的性能優化。未來的軟件版本還將持續更新優化,逐步支持多進程、多核運行等,以便充分利用處理器資源,實現性能的進一步提升。
-
測試系統
+關注
關注
6文章
822瀏覽量
62133 -
ecu
+關注
關注
14文章
886瀏覽量
54504 -
上位機
+關注
關注
27文章
942瀏覽量
54814 -
CANoe
+關注
關注
4文章
66瀏覽量
8647 -
VTP
+關注
關注
0文章
4瀏覽量
2301
原文標題:基于CANoe的高性能測試系統解決方案
文章出處:【微信號:VectorChina,微信公眾號:Vector維克多】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
CANoe:網絡和ECU開發、測試和分析的專業工具
采用GDDR6的高性能內存解決方案
高性能充放電方案在電池測試設備中的應用
會充電的CANoe又來了|OBC測試系統
關于使用硬件接口卡及CANoe軟件的常見問題和解決方案

基于CANoe的高性能測試系統解決方案






 工商網監
工商網監
評論