 將成“標配”?自動駕駛域控制器深度解析
將成“標配”?自動駕駛域控制器深度解析
隨著電車的普及,ECU(電子控制單元)數量不斷遞增,目前市面上一輛汽車平均約采用25個ECU,而一些豪華高端車型已突破100個,在愈發復雜的線路中,如何保證數據處理和網絡安全的最優化成為難題。博世、大陸等Tier 1企業認為,以域為單位的DCU (域控制器)集成化架構是最佳解決方案。
 自動駕駛系統架構
自動駕駛系統架構博世經典的五域分類將整車分為動力域、底盤域、座艙域/智能信息域、自動駕駛域和車身域。域控制器是汽車電子結構未來發展的趨勢,其量產價格更低,且可以用更少的器件完成更多的功能。隨著智能駕駛的到來,其所涉及的感知、控制、決策系統復雜性更高,與車身其它系統的信息交互、控制也越來越多。各方都希望其能變成一個模塊化的、可移植性的、便于管理的汽車子系統。此時,專門定位于自動駕駛的域控制器系統就應運而生。
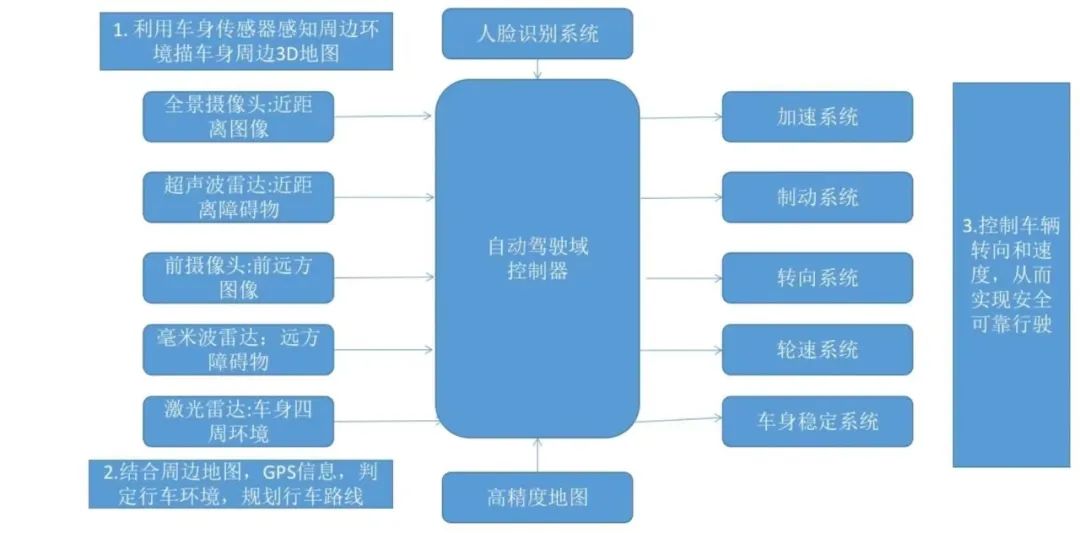
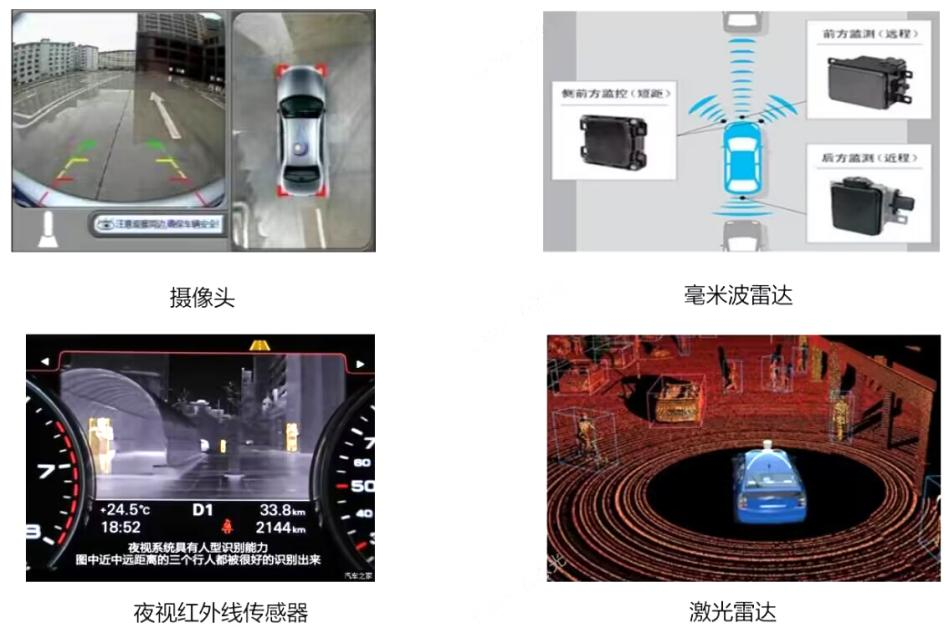
自動駕駛的域控制器相當于一個承上啟下的中樞,其需要具備多傳感器融合、定位、路徑規劃、決策控制、無線通訊、高速通訊的能力。還通常需要外接多個攝像頭、毫米波雷達、激光雷達,以及IMU等設備,完成的功能包含圖像識別、數據處理等。因為要完成大量運算,一般來說,自動駕駛域控制器需匹配一個核心運算力強的處理器,才能夠為自動駕駛提供不同級別算力的支持。
不同的公司會因為不同的客戶以及需求選擇不同的方案,但中間也會有一些共性。比如在自動駕駛系統中,算力需求最高的當屬圖像識別部分,其次是多傳感器的數據處理,以及融合決策。目前業內有NVIDIA、NXP等多個方案,融合了攝像頭、高清雷達、激光雷達和超聲波雷達等在內的傳感器系統,以及域控制器處理系統等。
根據自動駕駛域控制器行業調研,目前自動駕駛域的開發模式多以車廠自研或主導+主機廠/核心軟硬件方案供應商+代工生產的模式,從而產生了整車交付、自動駕駛解決方案商、運營商的三種角色定位和協作,現階段車廠以長城,上汽等車廠為代表。
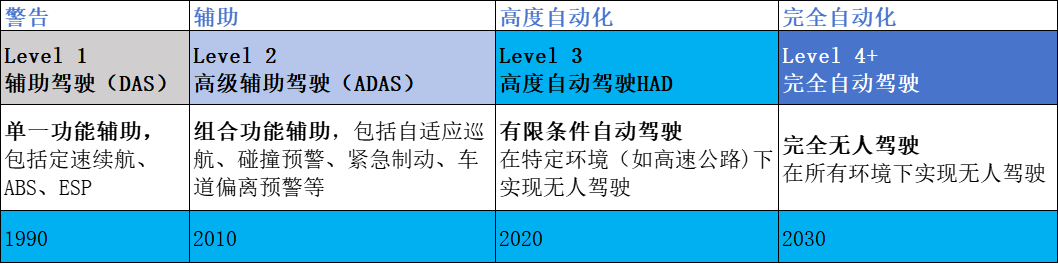 自動駕駛分級明細
自動駕駛分級明細硬件結構上,智能駕駛域控制器承載了車輛線控平臺與多數量、多類型的外圍傳感器,內部以大量多并行計算作為主要特點,向外則需要對接大量不同類型的傳感器接口。大批量、多類型的數據流入特征,使得自動駕駛域控制器的底層芯片應當是異構多核芯片。
在智能駕駛領域,唯樣也可提供諸多相關元器件物料,以下列出供參考:
電感類:DC/DC電源功率電感,濾波電感等,單機用量一般在20pcs以上(TDK Corporation、TDK-EPCOS、CHILISIN、TAI-TECH)
串行解串:(ROHM)
Flash類:啟動Flash,多以512M容量為主(GD、聚辰)
聚合物鉭電容類:用于芯片端低壓高容值要求的場合(KEMET)
阻容類:(TDK、YAGEO、KEMET、SAMSUNG、Panasonic、FH、太誘等)
陀螺儀:(TDK-InvenSense的IAM-20685產品)
電解電容:容值多在100~220uF之間(尼吉康、LELON)
分立半導體:(Infineon、LRC、Nexperia、AOS、JJW)
研究預測,到2050年之后,幾乎所有汽車都將帶有自動駕駛功能,自動駕駛將成為“標配”。自動駕駛技術的蓬勃發展,可讓人們出行更加安全舒適、便捷。當然域控制器的發展,意味著今后會有更高的算力需求,未來對元器件的需求會十分龐大!
注:本文為原創文章,未經允許禁止轉載!
審核編輯 黃宇
-
自動駕駛
+關注
關注
784文章
13899瀏覽量
166699 -
域控制器
+關注
關注
0文章
249瀏覽量
2678
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
自動駕駛真的會來嗎?
自動駕駛的到來
轉發:聊聊邊緣計算在自動駕駛中的應用場景
智能駕駛域控制器的SoC芯片選型
另辟蹊徑 自動駕駛域控制器
定位于自動駕駛的域控制器系統應運而生!
自動駕駛控制器的實例
阿丹能量:“自動駕駛汽車智能座艙域控制器”
英恒科技正式發布CAELUS自動駕駛域控制器開源計劃
澳克諾領跑智駕域控制器,加速自動駕駛進入量產時代
自動駕駛域控制器的來龍去脈






 工商網監
工商網監
評論