 阻抗控制在頻域范圍內的定義
阻抗控制在頻域范圍內的定義
阻抗控制在頻域范圍內的定義:
考慮到交互力與位置的關系,可以演變為如下模式:
阻抗可以以期望慣量、阻尼與剛度的形式呈現,因此:
可實現程序如下:
Z=Md*s+Bd+Kd*(1/s);
bode(Z)
grid on
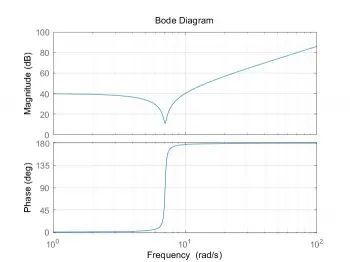
仿真結果如下:
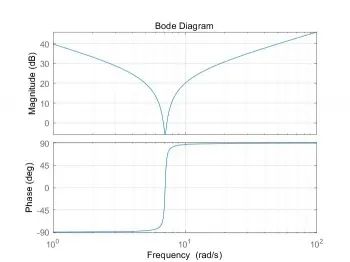
從分析結果中可以看出,虛擬動態模型存在一個凹形狀,這是由于系統動態的影響因素。
當考慮到交互力與位置的頻域幅頻特性關系時,可以用以下代碼進行分析:
Z=Md*s+Bd+Kd*(1/s);
bode(Z)
bode(s*Z)
grid on
而阻抗控制在時域上的微分方程形式如下:

理解: 硬件和控制器之間的物理等價性。這意味著不僅受控系統的硬件組件可以影響物理系統的表面行為,而且控制器也可以影響。換句話說,控制器對受控物理系統的最終效果不僅僅是控制運動或力,而是 修改其表觀動態特性 。
檢測到外力并產生相應的執行器力來輔助機器人的運動,這使受控系統執行一個修正的行為。
阻抗的勢與流: 勢(即力)輸入和流量(即運動)輸出,阻抗代表了從運動到力的因果關系。
阻抗控制與其他控制方法相比較,明顯的優勢: 位置控制適用于自由運動,而不是受約束的運動。力控制需要接觸力的反饋信息。因此,它不能在自由空間中工作。
混合位置/力控制將任務空間劃分為兩個子空間,稱為位置控制和力控制子空間。在操作過程中,必須根據相應的子空間來切換控制規律,這可能會導致響應的不穩定。相比之下,阻抗控制是一種統一的控制策略,適用于所有的操作階段,包括自由運動、約束運動和瞬態階段,而不需要切換控制模式。
阻抗控制在笛卡爾空間中的動態模型:

期望的動態行為表達:

聯立兩個公式就可以得到機器人控制律:
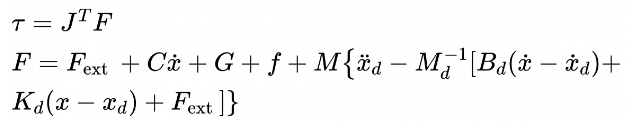
用期望的阻抗來“掩蓋”原始行為,即通過利用硬件的固有特性,可以在沒有反饋的情況下調節末端的阻抗行為。
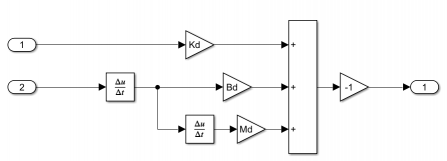
為了凸顯阻抗控制方法,簡化了機器人系統,Simulink可實現模型:
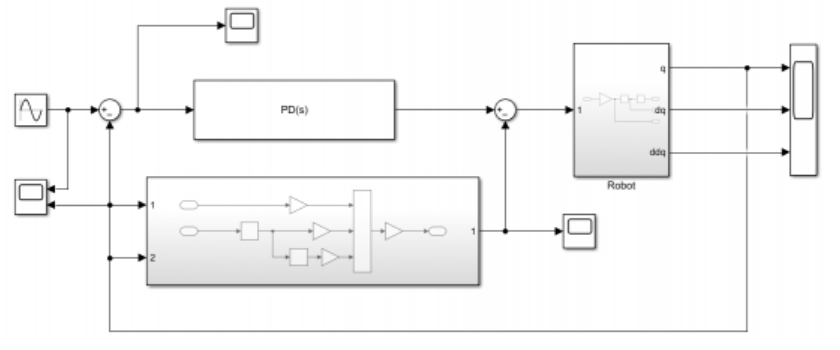
基于上述模型,采用單關節機器人來驗證阻抗控制算法的有效性。
機器人實際位置,速度與加速度仿真分析結果如下:
軌跡跟蹤誤差結果如下:
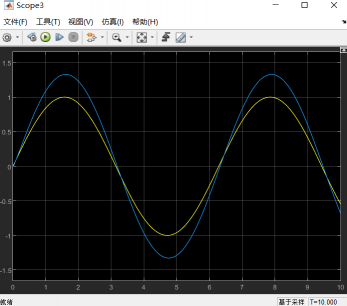
期望運動與實際運動:(由于阻抗呈現的剛柔因素,需要進行控制參數的調節可實現期望的動態平衡)
阻抗控制輸出的力修正量:
存在的問題
穩定性問題、力跟蹤方法、混合阻抗控制、魯棒性方法、自適應算法、學習控制等。模型的不確定性和未知的環境是阻抗控制中不可避免的困難。
為了減少這些問題的負面影響,將一些先進的控制技術與阻抗控制相結合,包括魯棒方法、自適應方法和學習方法。自適應阻抗控制方法可進一步分為兩類。
其中一類是處理模型的不確定性。另一個目的是增強對未知環境的適應性。處理未知環境的方法通常被稱為可變阻抗控制,因為阻抗模型的參數值是可變的,以適應變化的環境。應用神經網絡技術,提高了控制器對模型不確定性的魯棒性。
關鍵: 使機器人操作能夠更好地實現不確定動態和不確定環境下的動態交互。
-
機器人
+關注
關注
211文章
28437瀏覽量
207175 -
模型
+關注
關注
1文章
3247瀏覽量
48855 -
阻抗控制
+關注
關注
1文章
55瀏覽量
10651
發布評論請先 登錄
相關推薦
CC2530頻偏需要控制在多少范圍內才可以保證正常工作呢?
怎樣把電壓保持在某個數值電壓之上,控制在一定范圍內
高速HDMI接口PCB相關阻抗匹配控制設計指南
AD5521可以設計滿足1~2GHz寬范圍內的阻抗匹配嗎?
為什么將噪聲極點(noise pole)控制在噪聲帶寬內?
PID控制在交流位置伺服系統中的應用

高壓、低靜態電流同步降壓型 DC/DC 控制器在 -55oC 至 125oC 的溫度范圍內工作

60V 輸入、低靜態電流降壓型控制器在 -55°C 至 125°C 的溫度范圍內工作





 工商網監
工商網監
評論