 國內4D毫米波雷達廠商名錄
國內4D毫米波雷達廠商名錄
4D毫米波雷達(也被稱為4D成像雷達)可以實現類似于激光雷達的成像功能,而在成本方面只有激光雷達的10%-20%。那么,4D毫米波雷達在汽車自動駕駛領域是最理想的傳感器嗎?
傳統毫米波雷達可以檢測物體的水平方位角(Azimuth)、距離(Range)和速度(Velocity),在此基礎上,4D毫米波雷達還能夠處理俯仰方位角(Elevation)信息,即四維數據,可以說4D毫米波雷達是強化的毫米波雷達。
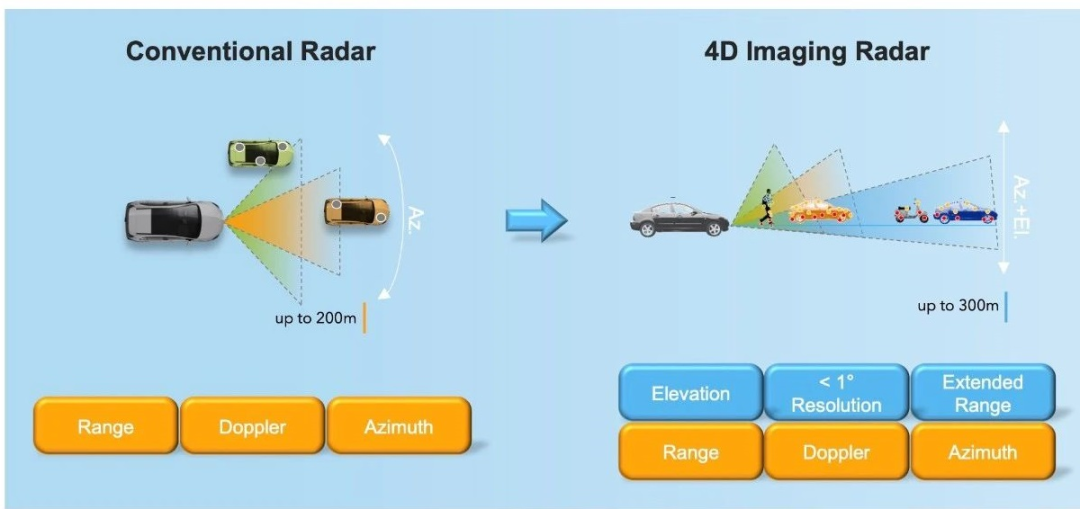
圖注:4D毫米波雷達與傳統雷達的區別(圖片來源:NXP)
在汽車應用場景中,由于缺乏高度信息,傳統雷達在視角上只有一個平面,無法區分目標物體是在“路上”還是在“空中”,這使得毫米波雷達無法有效發揮作用,尤其是在靜態物體識別方面。4D毫米波雷達可以捕捉汽車周圍目標的空間坐標和速度信息,還能計算目標的俯仰角信息,進而提供汽車周圍的環境信息,規劃出逼真的行駛路徑。為了實現這一技術,通過增加實際或虛擬天線的數量,有效提高角分辨率,生成更多的點云(點云指的是某個坐標系下所有點的數據集),并進一步對目標物體的基本輪廓和形狀進行成像。此外,經過深度學習,4D毫米波雷達可以區分不同的目標,例如行人、自行車、汽車、卡車等。既然4D毫米波雷達具備上述優勢,那么它是否可以取代激光雷達呢?取代激光雷達?激光雷達(LiDAR)或4D毫米波雷達能否成為智能駕駛汽車的主要傳感器,取決于具體場景,根據不同功能和需求開發不同的解決方案。
(1)從技術角度來看,4D毫米波雷達與激光雷達相比,不是一個數量級,前者無法取代遠距離高性能激光雷達。
從點云應用來看,4D毫米波雷達雖然也具備成像功能,但在點云密度和質量方面仍無法與激光雷達的性能相提并論,難以滿足高水平自動駕駛的感知需求。
在自動駕駛場景中,對前向檢測精度的要求極高。當汽車向前行駛時,必須能夠準確檢測和識別前方物體信息,包括大小、距離、方向和速度等,任何誤報或漏報都可能導致事故。LiDAR可以通過掃描周圍環境,形成3D圖像模型,并且可以在水平視場中每秒產生數百萬個點云,其點云密度足以滿足不同級別自動駕駛的感知需求。
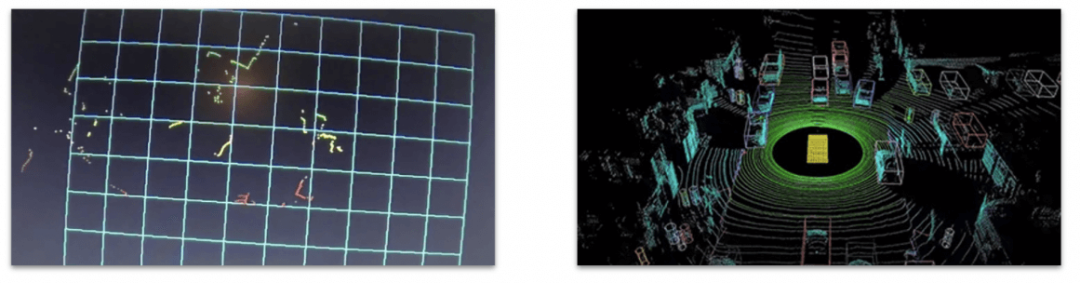
圖注:點云數據被用于成像,反映汽車周圍的環境(圖片來源:thinkautonomous.ai)
(2)從成本角度來看,此前有一種觀點認為,4D毫米波雷達未來可能會取代low-beam激光雷達,主要是成本驅動,但是在價格方面,一些4D毫米波雷達的價格并不比Flash LiDAR便宜,而且,單片4D毫米波雷達仍處于早期市場拓展階段。
(3)而且,建立一個標準化、量產化的產品可能需要3年甚至更長時間。4D毫米波雷達比較有可能取代的應該是傳統毫米波雷達,而不是激光雷達。預計4D毫米波雷達將首先以側雷達的形式搭載到汽車上。
無論怎樣,4D毫米波雷達具有潛力,根據IEEE資料,4D毫米波雷達在自動駕駛(AD)系統中顯示出作為獨立或輔助傳感器的巨大潛力,提高動態交通環境下的感知準確性,因為它具備“在極端環境中的魯棒性以及出色的速度和遠程測量能力”。該項研究同時表明,4D毫米波雷達除了需要在點云方面增強,還需要在算法、實時性能、數據集等方面進行提升。
圖注:研究表明,4D毫米波雷達在自動駕駛(AD)系統中可提高動態交通環境下的感知準確性(來源:IEEE)
對于自動駕駛來說,沒有任何一種傳感器是完美的,只有同時使用多種傳感器,才能獲得自動駕駛所需的精度和準確度,因此,傳感器融合(fusion)或者傳感器套件(suit)更為常見。那么,什么樣的傳感器配置符合當前L2或者L2+級別自動駕駛的需求?
“圖像傳感器+4D毫米波雷達”組合或將更加普遍多數汽車OEM廠商在其ADAS/AD傳感器套件中,將4D毫米波雷達與圖像傳感器、LiDAR和其他雷達一起使用。機構Frost & Sullivan預計,“圖像傳感器+4D毫米波雷達”的組合可能會在大眾市場的汽車中變得普遍;昂貴的LiDAR傳感器被用于高檔汽車以及具有L3和更高自動駕駛能力的汽車。在2025年之后,當LiDAR成本降低,才有可能與4D毫米波雷達在大眾市場形成競爭。
配備L2/L2+自動駕駛功能的汽車越來越受歡迎,并需要具有成本效益的傳感器提供足夠準確的點云數據,將誤報率降至最低,4D毫米波雷達將在這一領域表現出色。體現在性價比、可擴展性,及其技術進步的提高。目前4D毫米波雷達擁有從多個芯片組和傳感器,到兼具短程、中程和長距離檢測能力的單芯片解決方案,這將提高其采用率,并有可能降低ADAS傳感器套件成本。
Frost&Sullivan預測,到2030年,北美和歐洲的乘用車成像雷達市場將達到約370萬臺。從用于L3的1到2個遠程和短程成像雷達,發展到L4和L5汽車的多達5個,成像雷達可以取代傳統的短程雷達(SRR)和遠程雷達(LRR)。
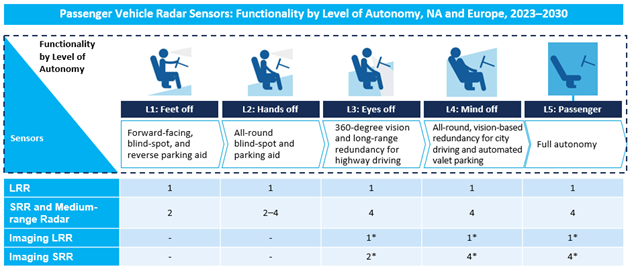
圖注:2023-2030年不同級別自動駕駛使用的毫米波雷達數量(圖片來源:Frost & Sullivan)
雷達傳感器的主要廠商和產品1、NXP:提供完整的雷達傳感器解決方案今年5月,NXP宣布蔚來汽車將部署其雷達技術,包括其4D毫米波雷達解決方案。NXP提供完整的雷達傳感器解決方案,可實現汽車周邊360度感知。可擴展的傳感解決方案套件涵蓋汽車制造商日益多樣化的用例和架構,從角雷達到高分辨率4D毫米波雷達。
NXP S32R系列提供安全可靠的雷達處理能力,產品組合適用于角雷達、前雷達和4D成像雷達等用例。NXP提供4D成像雷達開發板包括4個TEF8232雷達MMIC芯片,分別可以接出12根發射天線和16根接收天線,信號在完成發射、接收、混頻和采樣后,通過MIPI CSI接口傳輸到S32R45雷達MCU上進行處理,實現一個完整的4D成像雷達檢測解決方案。
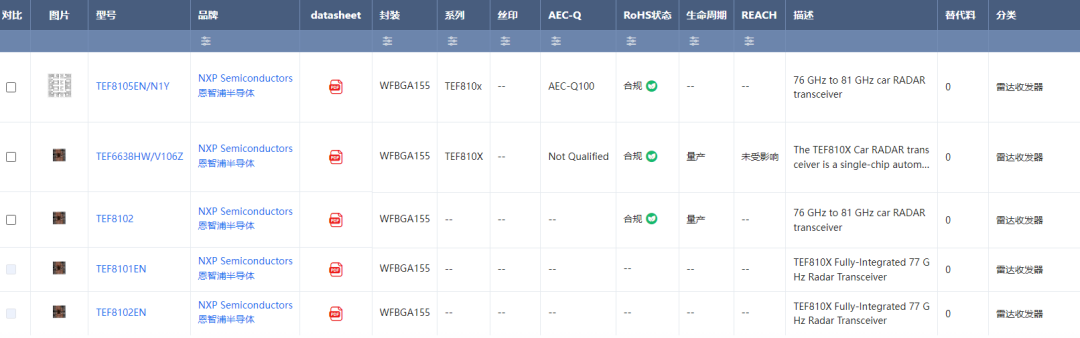
圖注:NXP雷達收發器(圖片來源:芯查查SaaS)
2、瑞薩電子:兼具4D毫米波雷達、ADAS SoC等簡化雷達系統設計
瑞薩電子去年10月收購的Steradian是一家提供4D毫米波成像雷達解決方案的fabless公司。瑞薩電子計劃依托汽車雷達市場提供的高增長機遇,借助Steradian的雷達技術擴展其汽車產品組合,并擴大其在雷達市場的影響力。由此產生的汽車雷達解決方案將結合新的汽車雷達產品、瑞薩電子用于處理雷達信號的ADAS SoC(片上系統)、電源管理IC(PMIC)和計時產品以及用于物體識別的軟件,這些解決方案將簡化汽車雷達系統設計,并有助于加快產品開發。產品方面,瑞薩電子SRIR256-V2是一種實時4D成像雷達系統,基于SVR4414高性能CMOS雷達收發器IC。SRIR256-V2通過級聯4個SVR4414收發器,每個收發器具有4個獨立的發送通道和4個獨立的接收通道,采用多輸入多輸出配置(MIMO),實現了一流的空間分辨率。這種16個發射和16個接收器組合的布置產生了256個虛擬通道,用于對前方的水平和垂直空間進行采樣。LRR模式的SRIR256-V2可以將多個獨立的發射通道同相組合,最大限度地擴大范圍,這有助于在遠距離應用中檢測250米以外的目標。
3、經緯恒潤:4D毫米波雷達2024年量產
經緯恒潤在研項目包含4D毫米波雷達,圍繞下一代多片級聯高性能毫米波雷達架構,融合MIMO陣列信號處理、雷達鏈路自校準、基于深度學習的目標識別等新技術,開發4D毫米波雷達,為實現L3平臺毫米波雷達傳感器奠定基礎。預計經緯恒潤的4D毫米波雷達將在2024年達到量產狀態。其研發的高性能4D毫米波雷達產品采用Arbe的方案,適合于使用4D毫米波雷達替代16線激光雷達,或降低對激光雷達數量要求的客戶。經緯恒潤表示,部分客戶可能只是想要彌補視覺方案的缺陷,這種情況下客戶對于4D毫米波雷達的要求會相對較低一些,因此經緯恒潤考慮研發完成48發48收、24發12收的毫米波雷達之后,再去研發相對低性能的版本。小 結目前自動駕駛從L2/L2+向L3演進,4D毫米波雷達在這個過程中具有重要的應用價值。隨著進一步優化算法、降低成本以及與其它傳感器進行深度融合等方面的努力,其技術優勢將得到充分發揮。本文講述了4D毫米波雷達在自動駕駛中的潛力,表明其在當前主流L2/L2+自動駕駛的傳感器融合中的作用日益突顯,隨著供應商的產品組合增強,汽車OEM對該項技術的采納,技術格局有可能改變。
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753573 -
毫米波
+關注
關注
21文章
1923瀏覽量
64810 -
毫米波雷達
+關注
關注
107文章
1044瀏覽量
64367
發布評論請先 登錄
相關推薦
10家國產毫米波雷達企業融資超10億元!國產機會在哪里?
康謀技術 | 毫米波雷達技術解析


正和微芯發布4D毫米波雷達SoC芯片RS6240
簡述毫米波雷達的結構、原理和特點
加特蘭毫米波雷達SoC家族再進化,為全球市場提供高性能雷達解決方案

基于毫米波雷達的手勢識別算法
睿藍7獵光Max車型交付啟動,搭載12個超聲波雷達及5個4D毫米波雷達
毫米波雷達的作用 毫米波雷達與超聲波雷達的區別
經緯恒潤4D成像毫米波雷達亮相 CES 2024

4D毫米波成像雷達的測試要求都有哪些嗯?

中央域控雷達:4D雷達新時代






 工商網監
工商網監
評論