") 機(jī)器人坐標(biāo)系管理TF跟隨功能解析
機(jī)器人坐標(biāo)系管理TF跟隨功能解析
海龜跟隨功能解析
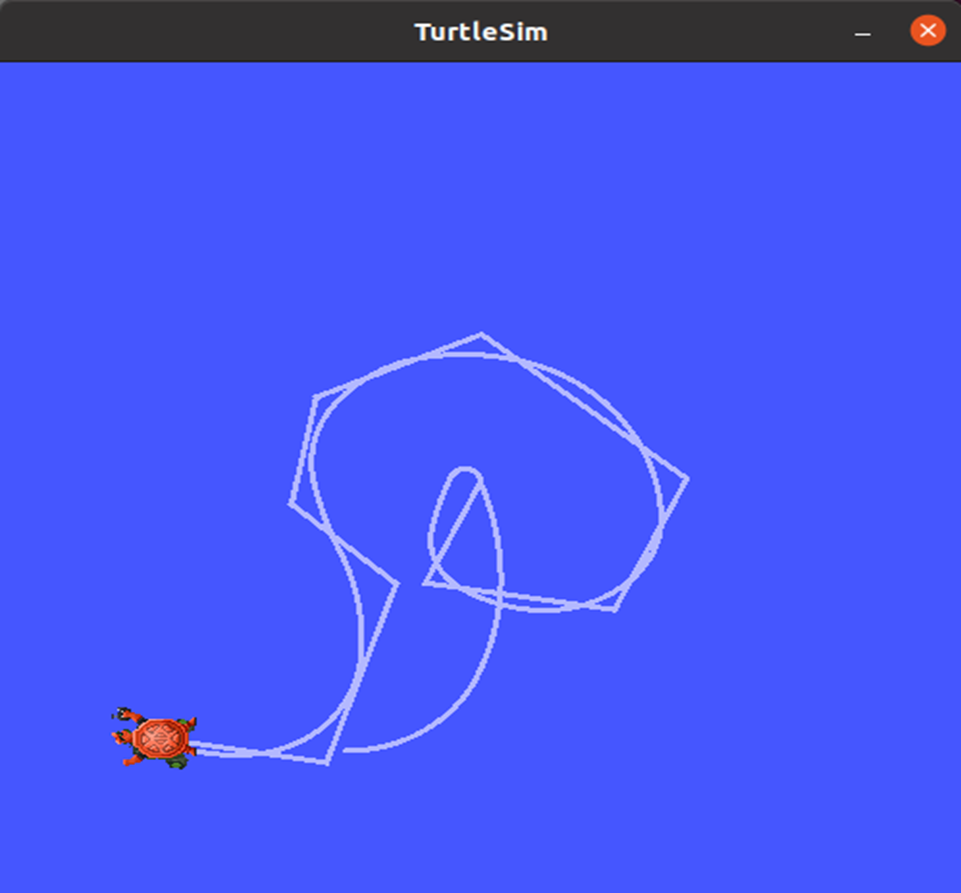
運(yùn)行效果
先看下實(shí)現(xiàn)的效果,啟動終端后,通過如下命令啟動例程:
** ros2 launch learning_tf turtle_following_demo.launch.py** ros2 run turtlesim turtle_teleop_key
看到的效果和ROS自帶的例程相同。
原理解析

在兩只海龜?shù)?a href="http://www.xsypw.cn/tags/仿真器/" target="_blank">仿真器中,我們可以定義三個(gè)坐標(biāo)系,比如仿真器的全局參考系叫做world,turtle1和turtle2坐標(biāo)系在兩只海龜?shù)?a target="_blank">中心點(diǎn),這樣,turtle1和world坐標(biāo)系的相對位置,就可以表示海龜1的位置,海龜2也同理。
要實(shí)現(xiàn)海龜2向海龜1運(yùn)動,我們在兩者中間做一個(gè)連線,再加一個(gè)箭頭,怎么樣,是不是有想起高中時(shí)學(xué)習(xí)的向量計(jì)算?我們說坐標(biāo)變換的描述方法就是向量,所以在這個(gè)跟隨例程中,用TF就可以很好的解決。
向量的長度表示距離,方向表示角度,有了距離和角度,我們隨便設(shè)置一個(gè)時(shí)間,不就可以計(jì)算得到速度了么,然后就是速度話題的封裝和發(fā)布,海龜2也就可以動起來了。
所以這個(gè)例程的核心就是通過坐標(biāo)系實(shí)現(xiàn)向量的計(jì)算,兩只海龜還會不斷運(yùn)動,這個(gè)向量也得按照某一個(gè)周期計(jì)算,這就得用上TF的動態(tài)廣播與監(jiān)聽了。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28501瀏覽量
207472 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7338 -
ROS
+關(guān)注
關(guān)注
1文章
278瀏覽量
17032
發(fā)布評論請先 登錄
相關(guān)推薦
工業(yè)機(jī)器人常用坐標(biāo)系介紹
abb機(jī)器人工具坐標(biāo)系問題
機(jī)器人的坐標(biāo)系的建立
介紹坐標(biāo)系和機(jī)器人之間的紐帶即連桿坐標(biāo)系
機(jī)器人基坐標(biāo)系標(biāo)定方法研究
關(guān)于工業(yè)機(jī)器人的四類坐標(biāo)系概述
機(jī)器人4大坐標(biāo)系講解
帶你來剖析機(jī)器人的坐標(biāo)系吧!
機(jī)器人坐標(biāo)系用法和算法原理

機(jī)器人坐標(biāo)系選擇指令和操作步驟

世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系之間的關(guān)系

焊接機(jī)器人坐標(biāo)系有哪幾種

深度剖析機(jī)器人的四大坐標(biāo)系

機(jī)器人中都有哪些坐標(biāo)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論