") ROS如何配置固定串口設(shè)備
ROS如何配置固定串口設(shè)備
配置固定串口設(shè)備
在linux中設(shè)備接到哪個(gè)串口號(hào)上是隨機(jī)的,為解決這個(gè)問(wèn)題,可以先將N100 設(shè)備的串口號(hào)設(shè)置成固定的名稱,避免后期需要重復(fù)的修改配置
修改串口號(hào)
從網(wǎng)上下載 CP21xxCustomizationUtility 軟件。
下面通過(guò) CP21xxCustomizationUtility 這個(gè) windows 上的軟件修改并固定
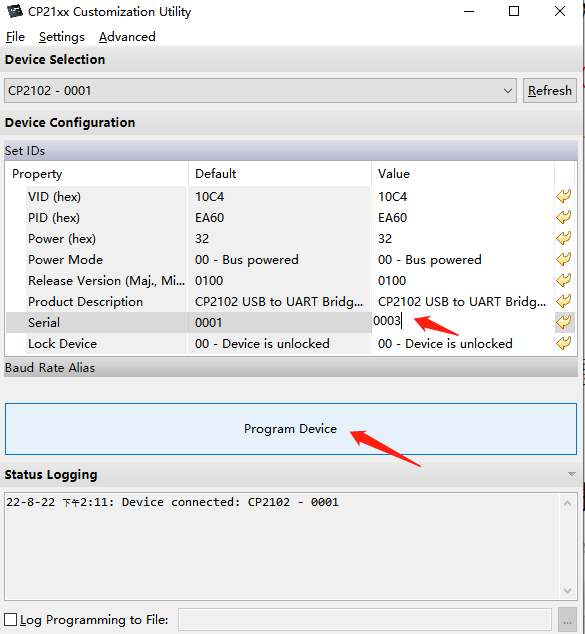
修改0003那個(gè)地方,然后點(diǎn)擊 Program Device
設(shè)備創(chuàng)建別名
外設(shè)對(duì)應(yīng)的串口名一般都是會(huì)變化的,為了避免手動(dòng)選擇,這里可以通過(guò)給 USB 設(shè)備創(chuàng)建別名的方式解決。
命名一個(gè)wheeltec_udev.sh 腳本文件
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0003", MODE:="0777", GROUP:="dialout", SYMLINK+="fdilink_ahrs"' >/etc/udev/rules.d/fdilink_ahrs.rules
service udev reload
sleep 2
service udev restart
其中 ATTRS{serial}==”0003” 就是剛從0001改為的0003,其它信息沒(méi)有變,看上面的截圖
sudo chmod 777 wheeltec_udev.sh
給這個(gè)腳本文件賦權(quán)
sudo sh wheeltec_udev.sh
執(zhí)行腳本
測(cè)試
把 WHEELTEC N100 模塊連接到 ROS 主控
在終端運(yùn)行:ll /dev 查看設(shè)備

結(jié)果現(xiàn)實(shí)已經(jīng)成功用 fdilink_ahrs 這個(gè)別名來(lái)代表慣導(dǎo)模塊了,后續(xù)不管接 到哪個(gè) USB 口,使用的時(shí)候均不需要考慮端口號(hào)變化問(wèn)題。
-
Linux
+關(guān)注
關(guān)注
87文章
11325瀏覽量
209953 -
串口設(shè)備
+關(guān)注
關(guān)注
0文章
16瀏覽量
8601 -
ROS
+關(guān)注
關(guān)注
1文章
279瀏覽量
17037
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于串口的STM32通過(guò)rosserial和ROS系統(tǒng)通信的代碼
最實(shí)用的STM32和ROS機(jī)器人的串口通信方案
如何使用串口聯(lián)系ROS和下位機(jī)
請(qǐng)問(wèn)ros的串口函數(shù)庫(kù)如何和stm32進(jìn)行串口通訊?
如何完成ROS與STM32之間的串口通信呢
請(qǐng)問(wèn)一下stm32與ros進(jìn)行串口通信的方法是什么?
ROS簡(jiǎn)介
如何在ROS上使用serial包進(jìn)行串口通信
基于無(wú)線wifi網(wǎng)絡(luò)的X3派和PC虛擬機(jī)通過(guò)ROS2實(shí)現(xiàn)跨設(shè)備通信
ROS路由器安裝和配置錄像
如何配置ROS驅(qū)動(dòng)功能包






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論