 如何利用LiDAR實現深度感測
如何利用LiDAR實現深度感測
LiDAR簡介
LiDAR的全稱是Light Detection and Ranging(激光探測及測距),是一種利用激光感測距離的方法,它會測量激光從物體反射回來所用的時間而達到測距的目的。根據具體應用,可以使用不同的波長,但最常用的是紅外線(IR)。
大多數時候,人腦擅長推斷物體的相對深度/距離和大小,這是人類的一種本能,尤其是在駕駛車輛時。但成像系統卻很難做到這一點,尤其是標準圖像傳感器是用2D圖像表示3D場景。在類似于人眼的立體布局中使用兩個圖像傳感器,能夠提取深度數據,但測距精度有限,并且會受到環境光線的影響。
使用LiDAR獲得深度數據就可以在不依賴光線條件的情況下實施測量,并消除圖像的模糊問題,從而做到場景中區分及理解不同物體。將發射到物體后反射回來的光脈沖與精準定時測量相結合,可以計算出物體的距離。
LiDAR在汽車領域的應用十分廣泛,尤其是用于SAE級別為L3~L5的半自動駕駛車輛,例如,感測車輛周圍的物體;在高速公路上看到數百米外的前方。LiDAR也常用于送貨機器人和其他需要自主感知的應用。該技術也廣泛應用于以高精度快速生成可處理的3D深度圖的戶外應用情景——而使用傳統測量技術時,這一過程需要耗時數日。
例如,農業領域使用LiDAR測量田地或土地,繪制地圖、評估作物狀況,從而使農民能夠建模預測作物產量,以及選擇最合適的農藥/肥料。對于儲存在筒倉中的谷物和儲存在貯存罐中的液體,只需在筒倉/貯存罐頂部安裝LiDAR,即可在不與內容物接觸的情況下立即測量儲量。
環境組織經常使用LiDAR來評估森林砍伐情況、測量海岸侵蝕情況或監測冰川消退情況。此外,在這些應用中,通過在無人駕駛飛行器(UAV)/無人機上安裝LiDAR,研究人員能夠對人跡罕至的偏遠地區進行勘測,而無需親自前往。
智能工廠在自動引導車(AGV)上使用LiDAR,運輸原材料進行加工,并將成品運送到發貨區。當智能工廠中的機器人使用LiDAR時,可以充分發揮LiDAR自身的強大功能,幫助這些機器人精確執行任務,并使它們能夠感測周圍是否有人,從而以周到和安全的方式工作。
LiDAR可用于快速勘測鐵路或高速公路等大型建設項目。LiDAR還可以作為一種安全輔助手段,使某些區域免受不必要或意外的入侵。這在存在危險物質或有大型機器工作的地方意義重大。LiDAR在所有照明條件下都能有效工作,意味著在這些類型的應用中,它可以提供可靠的永遠在線的保護。
LiDAR的類型
最常見的LiDAR類型是直接飛行時間(dToF)系統,其背后的原理非常簡單:測量光脈沖到達目標并返回傳感器所用的時間。光速是一個已知的物理常數,因此計算發射器/探測器和反射目標之間的距離十分簡單。
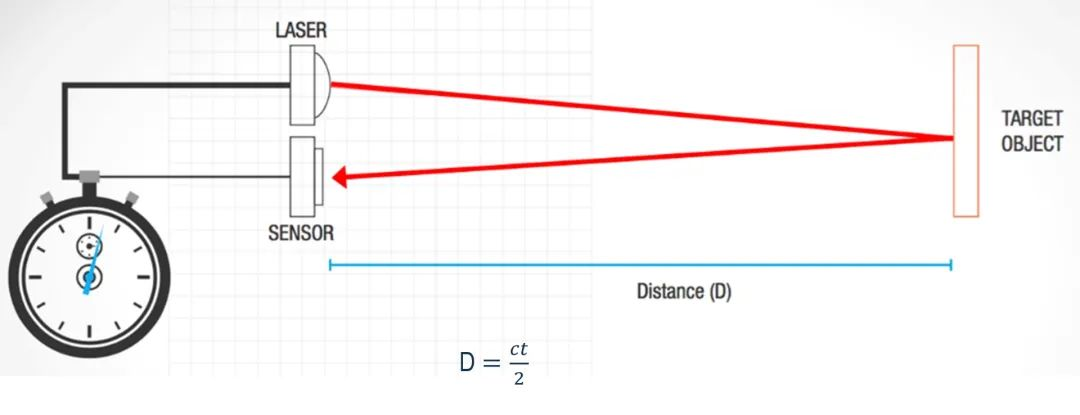
圖 1:dTOF可測量光到達目標并返回所需的時間
該技術通常使用由光源(最常見的是激光器)發射的單個非常短的脈沖,發射同時會激活一個精確的計時器。當光脈沖擊中范圍內的物體時,它將反射回到通常與激光器并置排列的高靈敏度光傳感器。一旦探測到返回脈沖,計時器就停止計時,這時可讀取到達物體并返回所用的時間。
只要知道從發送脈沖到收到回波經過的時間(t),使用光速常數(c)計算到目標物體的距離(D)就很簡單了。
dToF方法快速有效,可以測量多個回波,因此能夠探測LiDAR視野內的多個物體。它能夠用于遠程和近程 (0.1 m~300 m)應用,并且在整個范圍內保持穩定的高精度。
另一種LiDAR方法稱為間接飛行時間(iToF),同樣使用來自激光的連續光波。這種方法不會直接測量經過的ToF,而是根據已發射和已接收波形之間的相位差來確定ToF。
iToF技術更適合相對短的距離測量(<10 m),尤其是光線條件沒有室外那么具有挑戰性的室內應用,室外的對比度通常要高得多。該技術只能探測到最強的回波,因此只能探測單個物體。
第三種LiDAR是調頻連續波(FMCW),適合近程和遠程測距。該技術用可調諧激光器來產生連續光波,所產生的光波將在探測器處與反射光混合。這種混合可在本地波形和反射波形之間產生拍頻,由此計算出物距和方向速度。
雖然FMCW既有出色的測距性能,還能捕獲方向速度信息,但由于要使用帶有偏振控制的可調諧激光器,并且依賴短波紅外波長(要求激光器和探測器使用特殊半導體),這種LiDAR系統的總體成本大大增加。
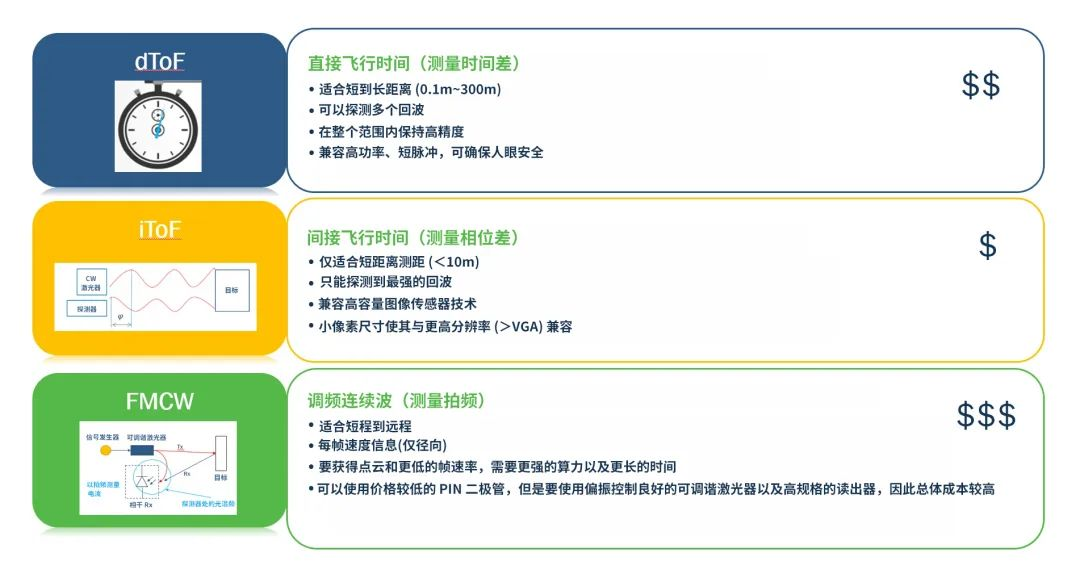
圖 2:基于LiDAR的深度感測方法比
“波長大辯論”
圍繞LiDAR最有爭議的話題之一是使用哪種波長。IR的使用優先于可見光,因為背景IR要少得多,所得信噪比(SNR)更好,從而使探測返回光變得更加容易。
IR光譜范圍內有多個合適的波長,包括近紅外(NIR)光譜(850 nm、905 nm、940 nm)和短波紅外(SWIR)光譜(1350 nm、1550 nm)。決定具體使用哪種波長是“波長大辯論”的關鍵議題。有三個最重要的標準需要考慮,分別是系統的性能、是否有合適的組件和系統的總體成本。
探測器是任何LiDAR系統中最基本的組件之一。CMOS硅基探測器可探測到波長在400 nm至1000 nm范圍內的光,因此其對可見光和NIR光敏感,但不能感測SWIR光。為了探測SWIR光,就必須使用InGaAs合金等III/V族半導體,與硅相比,InGaAs合金非常昂貴。
組件可用性是另一個考慮因素,尤其是就激光發射器而言。邊緣發射激光器(EEL)正逐漸為垂直腔面發射激光器(VCSEL)所取代,后者更容易封裝成陣列,并且在整個溫度范圍內波長穩定。雖然VCSEL目前的能效較低,價格也較高,但隨著它們應用范圍的不斷拓展,這種情況有望得到改善。
盡管SWIR EEL有多家供應商,但目前SWIR VCSEL只有一家供應商,而NIR VCSEL也有多家供應商。因此,選擇NIR更有可能提高供應鏈的安全性。
探測范圍很重要,因為這能夠增加可用的反應時間,從而提高安全性。但激光過強會傷害眼睛,因此IEC 60825規定了1ns激光脈沖的最大容許照射量(MPE)。
雖然NIR必須具有較低的MPE,但如果脈沖寬度縮短,則可以提高激光功率,而由于使用靈敏的探測器,可以達到最長300 m的測距范圍。在天氣好的時候,SWIR的測距范圍將超過NIR,但是SWIR更容易受到濕氣(如雨或霧)的不利影響,因此基于NIR的系統的性能下降速度將低于SWIR系統,從而可以在各種天氣條件下提供更一致的性能。
基于以上所述,通常認為NIR是汽車LiDAR的首選波長。NIR使得我們可以使用硅基器件,而不是InGaAs等更加昂貴的材料,可能更重要的是,相關組件可以從多個供應商處獲得,有助于建立起更強大的供應鏈。雖然NIR和SWIR在工作時都能夠確保人眼安全,但NIR在使用較低功率激光的同時,仍然能夠滿足汽車LiDAR的要求。
從商業角度來看,NIR的成本要低得多,而成本一直是汽車應用方面的一個重要考慮因素。IHS Markit的一項調查(Amsrud,2019)顯示,激光器和探測器的每通道成本約為4至20美元,而對于類似的SWIR系統,每通道成本約為275美元。即使有了進一步發展、容量增加,但預計NIR的成本仍將比SWIR低10~100倍。
LiDAR構成技術
任何LiDAR系統最重要的元件之一是可捕獲和量化反射激光的感測元件。雖然可以使用多種技術來實現這一點,但硅光電倍增器(SiPM)通常表現最好,這主要是因為它能夠以近似1,000,000數量級的高增益來探測單個光子。
因此,近年來SiPM的應用越來越廣泛,已然成為LiDAR深度感測應用的首選傳感器。與雪崩光電二極管(APD)等傳統探測器(不僅增益低得多,還需要對傳入信號進行積分)相比,這些器件能夠在高對比度條件下為長距離測距提供最高的SNR性能。其他優勢包括電源偏置更低、均勻性更好,以及對溫度變化的靈敏度降低等,使得SiPM成為使用APD的系統的理想升級選項。SiPM靈敏度更高,可以使用小封裝光模塊,因此使LiDAR更容易集成到車輛中。由于SiPM采用高容量CMOS工藝生產,這些高性能器件的探測器成本最低,進一步推動了LiDAR的普及。
安森美(onsemi)的ArrayRDM-0112A20-QFN是一個具有0.47 mm x 1.12 mm SiPM像素的1×12單片陣列,基于先進的專有RDM SiPM CMOS工藝,專為實現對NIR光的高靈敏度而開發,能夠在905 nm波長下使光子探測效率(PDE)達到行業領先的18.5%。在這個波長下,響應度大于100 kA/W。
由于SiPM的內部增益高,靈敏度可降至單光子水平,再加上高PDE,能夠探測出微弱的返回信號。這使得LiDAR系統可以探測更遠距離的低反射率目標。該陣列采用穩定可靠的10 mm x 5.2 mm QFN封裝,可以訪問12個獨立像素。
該陣列專為汽車LiDAR系統(包括閃光燈、機械或MEMS掃描LiDAR)而設計,是第一個獲得AEC-Q102 汽車認證的陣列,并已根據IATF 16949標準進行開發。由于該陣列成本低、性能高,可以實現經濟高效的遠程LiDAR方案,提高汽車的安全性和自主性水平。
總結
LiDAR是一項有著重要意義的技術,因為它的掃描系統能夠快速準確地確定深度,既可以進行單點掃描,也可以繪制物體或大型場地的3D圖。
在規劃LiDAR設計時,關鍵是要決定使用哪種IR光波長。綜合考量性能、是否有合適的組件和商業因素,NIR通常是首選。
在大多數LiDAR實現過程中,激光光源可能相對簡單,但探測器的選擇對系統性能有很大影響。安森美的最新SiPM陣列具有出色的探測性能,更重要的是,對于汽車應用來說,它是首款獲得AEC-Q102認證的SiPM探測器。
參考文獻
Amsrud, P.(2019 年 9 月 25日)。實現低成本LiDAR系統的競爭[會議報告]。汽車LiDAR 2019,美國密歇根州底特律。
文章來源: 安森美
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28418瀏覽量
207096 -
激光
+關注
關注
19文章
3201瀏覽量
64472 -
感測
+關注
關注
0文章
22瀏覽量
12833 -
LIDAR
+關注
關注
10文章
326瀏覽量
29423
發布評論請先 登錄
相關推薦

LIDAR激光雷達逆向建模能用到revit當中嗎
LiDAR激光點云數據處理軟件處理流程
lidar激光雷達掃描儀有什么用
lidar傳感器和ryyb哪個好
利用Matlab函數實現深度學習算法
利用TensorFlow實現基于深度神經網絡的文本分類模型
基于SPAD單光子相機的LiDAR技術革新

如何利用CNN實現圖像識別
深度揭秘磁環磁環共模電感線圈漏感的原因
什么是LiDAR?LiDAR技術的新時代 前景廣闊未來可期
康謀分享|aiSim5激光雷達LiDAR模型驗證方法(二)

LiDAR4D:基于時空新穎的LiDAR視角合成框架
Valeo為何堅守著LiDAR?
基于LiDAR點流的運動事件檢測






 工商網監
工商網監
評論