 硅光電倍增管用于直接飛行時間測距應用(一):直接ToF測距系統的設計
硅光電倍增管用于直接飛行時間測距應用(一):直接ToF測距系統的設計
本白皮書旨在協助開發基于硅光電倍增管(SiPM)的激光雷達(LiDAR,光探測和測距)系統。下面的章節包含了以下信息:直接飛行時間(ToF)測距儀的激光器、計時和光學參數的設計和實現,以及詳細分析將SiPM整合到此類系統中時必須考慮的關鍵方面。
前言
LiDAR是一種測距技術,正越來越多地用于移動測距、汽車ADAS(先進駕駛輔助系統)、手勢識別和3D繪圖等應用。與雪崩光電二極管(APD)、PIN二極管和PMT等替代性傳感器技術相比,采用硅光電倍增管(SiPM)作為光敏傳感器有許多優勢,特別是對于移動和大批量產品而言。
安森美(onsemi)的SiPM提供:
從250納米到1100納米的單光子探測
低電壓——易于實現系統要求
低功耗——較低的工作電壓和簡單的讀出電子裝置實現低功耗設計
高帶寬和快速響應時間——最小化測距時間
能夠利用低激光功耗直接ToF測距技術的優勢
低噪聲和高增益——可實現好的信噪比(SNR)
標準CMOS制造工藝——成本低,高度一致性,可擴展生產
小尺寸SMT封裝——可提供1毫米的傳感器
與其他傳感器相比,遷移到SiPM傳感器技術會帶來一系列不同的限制。本白皮書旨在幫助用戶充分利用該技術的優勢,并盡快實現采用SiPM傳感器的工作設置。
為此,安森美創建了三個工具來幫助用戶;一個用于仿真的MATLAB測距模型,一個測距演示器硬件裝置,以及本文文件。
我們創建了一個直接ToF系統的詳細MATLAB模型,以便于仿真基于SiPM的測距應用。該模型可用于支持測距系統的設計,并可進行修改以仿真各種應用和實施。
一個基于SiPM的LiDAR演示系統已建成。對這個“第一代”系統進行了測量,并用于驗證MATLAB模型的仿真結果。
本文文件旨在幫助新用戶開發基于SiPM的直接ToF測距系統。它討論了各種系統和環境因素對所產生的信噪比的影響。
直接ToF測距系統的設計
一個直接的ToF測距系統所需的基本組件,如圖1所示
- 一個帶有準直光學系統的脈波激光器
- 一個帶有檢測光學組件的傳感器
- 計時和數據處理電子裝置

圖1. 直接ToF測距技術概覽
本文檔聚焦激光器、傳感器、讀出器和應用環境的系統設計。本白皮書中的單點、直接ToF基線工作可以擴展到更復雜的掃描和成像系統。在直接ToF技術中,一個周期性的激光脈波被指向目標,通常采用對眼睛安全的紅外區功率和波長。
目標擴散并反射激光光子,一些光子被反射回傳感器。傳感器將檢測到的激光光子(和一些由于噪聲而檢測到的光子)轉換為電訊號,然后由計時電子裝置進行時間標記。這個飛行時間t,可用來計算到目標的距離D,計算公式D=ct/2,其中c=光速,t=飛行時間。傳感器必須將返回的激光光子從噪聲(環境光)中區分出來。每個激光脈波至少捕獲一個時間標記。這稱為單次測量。
結合許多單次測量的數據以產生一個測量值,信噪比可以得到極大的改善,從中可提取出檢測到的激光脈波計時,具有高精度。有幾種不同的讀出技術可從檢測到的激光光子脈波中獲取計時信息,總結如下:
測距讀出技術
LED(前緣識別)——涉及對多光子訊號的上升沿的檢測。計時的準確性是由辨別返回的光訊號的上升沿的能力決定的。這種技術不受激光脈波寬度的影響。
全波形數字化——全波形被數字化,可以過采樣以提高精度。對于短激光脈波或高重復率源來說,可能難以實現。
TCSPC(時間相關的單光子計數)——提供最高的精度和最大的環境光抑制。這種技術要求每個激光脈波檢測不到一個訊號光子。這種技術可以不受環境光的影響,但需要短脈波時間、高重復率和快速計時電子裝置,以實現快速和準確的測量。
SPSD(單光子同步檢測)——TCSPC的一種形式,提供高環境光抑制。必須設計電子裝置來處理范圍模糊的問題。
建模一個直接ToF測距系統
我們創建了一個直接ToF系統的MATLAB模型。該模型的框圖如圖2所示。該模型給定一組與表1中所示相似的系統參數,目的是預測系統的整體性能。第一步包括分析計算傳感器的光照度(包括環境光和激光),給定一個選定的光學場景,可以通過改變相應的系統參數來改變。通過比較計算出的光照度與傳感器的飽和極限,可以驗證所選擇的設置是否適合測距。在特定設置不適合測距的情況下,可以通過改變系統參數來評估設置本身的改進。
該模型的第二部分包括一個Monte Carlo 仿真器,其中傳感器的隨機特性,主要是光子探測效率(PDE)和時間抖動,被再現。這一步允許通過仿真獲得傳感器的現實輸出。與分析部分相比,這一步考慮到了計時信息,如采集時間、激光的重復率和激光脈波寬度。Monte Carlo 仿真的結果被傳遞給一個讀出模型,通常是一個鑒別器,然后是一個TDC(時間到數字轉換器),它產生一個時間戳的柱狀圖,從中可以提取一個范圍測量。

圖2. 光照度的計算結合Monte Carlo仿真器,從而可以再現完整的系統輸出。

表1. SiPM直接ToF測距系統中的變量
測距直方圖
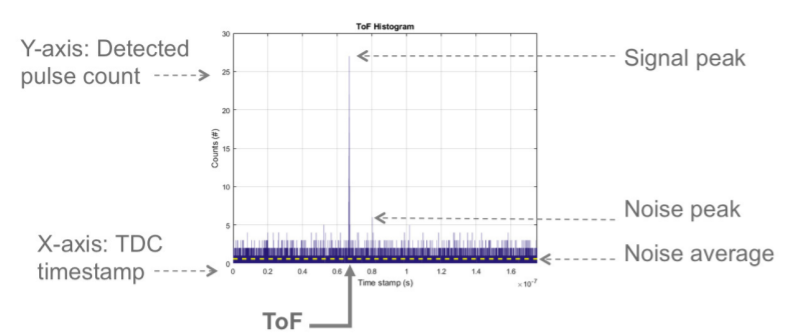
每次發出激光脈波時,采集系統都會進行一次單次測量。取決于許多因素,包括激光功率和與目標的距離,每個脈波檢測到的激光光子數量可能很低。理想情況下,每個檢測到的光子都會用時間標記。但每個單次測量的時間標記數量可能受到TDC死區時間的限制。通常情況下,許多單次測量的時間,各包含一個或多個時間標記,結合起來可產生一幀。在一幀過程中獲得的完整計時數據可以以直方圖的形式繪制出來,如圖3所示。
系統測距性能受到直方圖數據質量的限制,而直方圖又受到系統參數的影響。從第7頁“改變系統變量的影響”一節中詳述的系統參數分析中可以看出,有一些限制因素和一些可以作出的取舍。下面使用的測距直方圖也提供了一個直觀的表示,這對于描述各種參數對所采集數據的影響是很有用的。基本直方圖訊號和計時參數說明如下。
直方圖的信噪比,SNRH,是訊號峰值與最大噪聲峰值之比。SNRH = 訊號峰值/噪聲峰值。
在模型中,以下術語適用于測量時間:f = 激光頻率。
激光重復率限制了可以測量的最大ToF,無失真,這定義了每次單次測量的時間。
單次測量時間,tss = 1/f。
幀大小是指每張直方圖的單次測量數。較大的幀大小可以提高SNRH,產生更好質量的直方圖。測距速度由幀率定義:幀率=每秒測距次數 = 1/ tacq
圖3. 顯示訊號、噪聲和飛行時間的仿真直方圖實例
- 審核編輯 黃宇
-
激光雷達
+關注
關注
968文章
3972瀏覽量
189925 -
TOF
+關注
關注
9文章
483瀏覽量
36350 -
SiPM
+關注
關注
1文章
17瀏覽量
9003 -
LIDAR
+關注
關注
10文章
326瀏覽量
29423
發布評論請先 登錄
相關推薦
集成時間數字轉換器簡化了飛行時間測距應用的設計

激光測距傳感器輸出什么信號
光電倍增管接一個電阻與直接接跨阻放大器之間有區別嗎?
TDC7201適用于激光雷達、測距儀和ADAS中飛行時間應用的時間-數字轉換器數據表


光電倍增管在激光測距中的應用
直接飛行時間(dToF) SiPM LiDAR 平臺SECO-測距儀-GEVK數據手冊






 工商網監
工商網監
評論