 H橋電路的基本結構和工作模式
H橋電路的基本結構和工作模式
01H-橋電路基礎
1.簡介
你也許通過線上-線下的資料對于搭建H-橋電路有所了解,畢竟這些電路相對比較簡單。但有些資料介紹H-橋電路比較精準,但有些差一點。當你實際使用橋電路的時候也許就會意識到,很多電路特性實際上并沒有在網絡資料中說明清楚。下面的資料是來自于「H-橋電路基礎」[1]網絡文章的內容,作者在自行設計「uM-H橋」電路的過程中寫的博文,對于H橋電路的原理和 應用都充滿著熱情進行介紹。
▲ 文章作者制作的 uM-H橋電路模塊
雖然作者盡量避免涉及到H橋電路、電機控制原理等更深入的理論,但還是希望讀者對于基本電子元器件的特性(比如、電阻、電容、電感、電路網絡原理等)能夠熟知,否則也無法看懂他已經進行簡化并通過圖例、表格進行梳理的內容。
2.基本結構
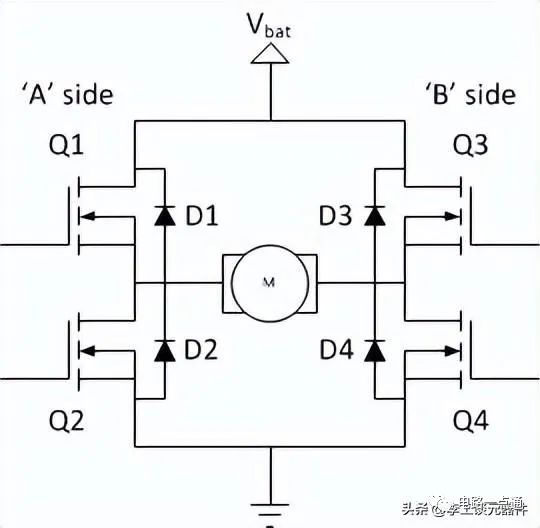
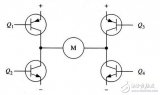
H橋電路與復雜很像中國漢字“「日」”字,如果去掉上下電源與底線,電路結構與英文字母“「H」”相似。在電路兩邊上下各自放置了四個由功率晶體管組成的“「電子開關」”,負載(通常是功率器件:比如電機)橫亙在左右電子開關中間。電路網絡結構與「惠斯通電橋」[2]相同。左右兩個組開關被稱為兩個半橋。
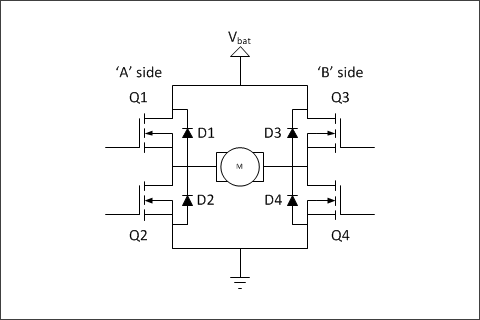
▲ H-橋電路基本結構
功率電子開關(Q1,Q2,Q3,Q4)通常使用雙極性功率三極管,或者場效應(FET)晶體管。特殊高壓場合使用絕緣柵雙極性晶體管(IGBT)。四個并聯的二極管(D1,D2,D3,D4)通常被稱為鉗位二極管(Catch Diode),通常使用肖特基二極管。很多功率MOS管內部也都集成有內部反向導通二極管。H-橋電路上下分別連接電源正負極。
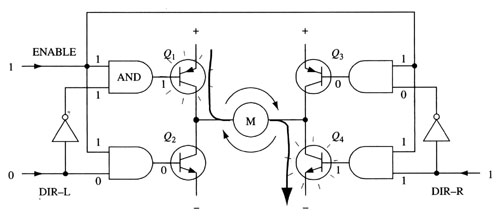
四個功率開關可以通過驅動電路被控制打開(Open)或者閉合(Close)。本質上四個功率管的開關狀態組合應該有種,但只有其中幾種不同的組合才能夠真正安全用于負載供電控制。
橋電路可以控制很多負載,但通常情況下會使用脈寬調制(PWM)驅動波形來為直流電機、雙極性步進電機等進行高效控制。
02工作模式
1.靜態工作狀態
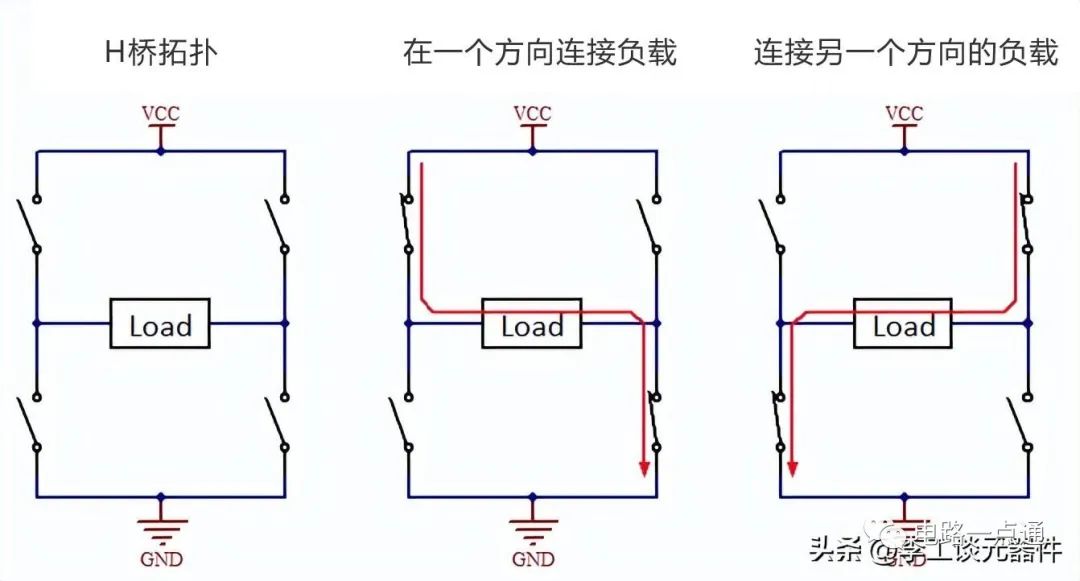
下面顯示了組成橋電路四個功率開關的不同開關狀態組合為負載所提供的不同驅動電源方式。
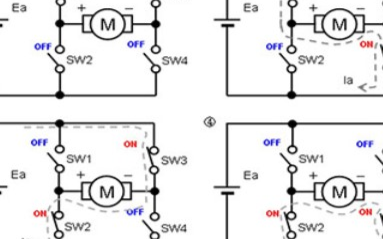
比如下圖中:左上右下(Q1,Q4)晶體管閉合,右上左下(Q3,Q4)晶體管斷開,負載上施加有左正右負的電源電壓(忽略了晶體管的導通電壓)。電機正轉。
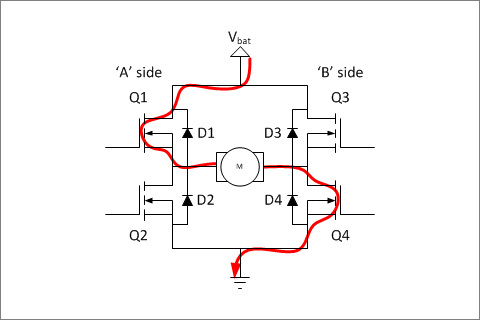
▲ H-橋電路驅動電機正向電壓
下圖是相反的情況,通過Q3、Q2的導通,Q1、Q4的斷開,電機負載上施加了相反機型的電源電壓。電機反轉。
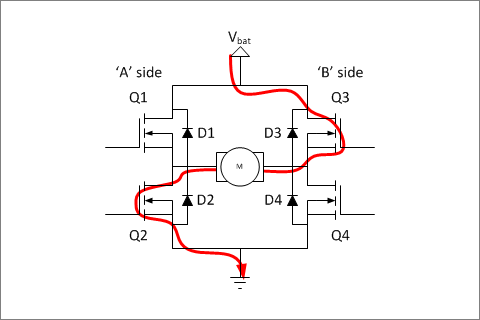
▲ H-橋電路驅動電機反向電壓
也有一些組合模式,是不向電機供電。比如當四個晶體開關都斷開,此時電機負載相當于兩端懸空。如果電機此時在運動,其轉子的動能就會在摩擦力的作用下逐步消耗,電機慢慢停止。
下圖所示的兩種情況:H橋電路的上半部(或者下半部)的兩個晶體管閉合,對應的另外兩個晶體管斷開。此時電機兩端被橋電路實際上是短接在一起。電機兩端電壓為0。如果此時電機在運動,那么它轉子的動能會通過所產生的反向電動勢(EMF)在外部短路橋電路回路中形成制動電流,電機會快速制動。
▲ 電機兩端電壓被橋電路強制短接在一起
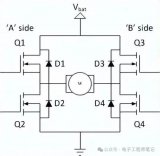
也有一些組合是需要堅決避免的。比如下圖所示的,當H-橋電路一邊的上下兩個晶體管同時導通(同時斷開是允許的),電源就會通過這兩個晶體管形成短路回路。所產生巨大的短路電流通常會毫不客氣的將這兩個晶體管給燒毀。
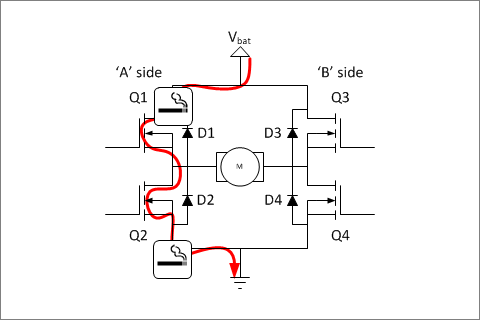
▲ H-橋電路直通
同邊橋臂短路情況有時是控制信號不好(沒有給足死區時間),有時是功率器件不夠堅強(耐壓不夠被擊穿)。但由于關系到H橋電路的生死,所以需要精細避免。
2.控制電機的兩種PWM模式
橋電路應用最多的場合是控制電機運動(比如特斯拉電動汽車驅動電路)。電機負載可以使用電阻Rm,電感Lm以及感應電動勢Vg的串聯來描述。電機運動所需要的轉動力矩是由流過串聯電路的電樞電流所產生,而電樞電流則是由施加在串聯電路上的電壓所產生。
由于電機本身帶有儲能慣性環節(包括有電儲能器件Lm以及機械儲能部件轉子的慣性),因此當使用高頻的脈沖電壓(PWM)作用在電機兩端時,產生轉矩的效果實際上由脈沖電壓的平均值決定。
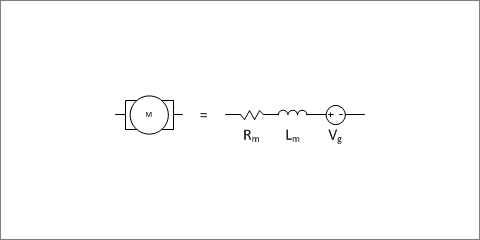
▲ 電機的等效模型
為了產生驅動電機不同極性、不同幅值的電壓,控制電機PWM波形有兩種工作模式:
極性-幅值驅動模式(Sign-Magnitude Drive),也稱單極性驅動模式:驅動電機的信號有控制H橋輸出極性的方向控制信號和控制PWM占空比幅值的脈沖信號;PWM占空比為0時,輸出電壓為0。
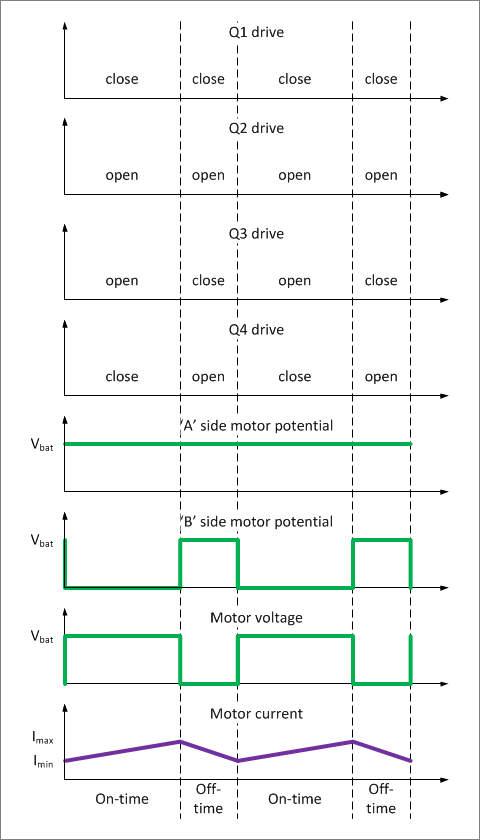
▲ 極性-幅值驅動模式橋電路的輸出與負載電壓電流波形
互鎖相位驅動模式(Lock Anti-Phase),也稱雙極性驅動模式:橋電路兩邊由極性相反PWM信號驅動。PWM占空比為50%時,輸出平均電壓為0。
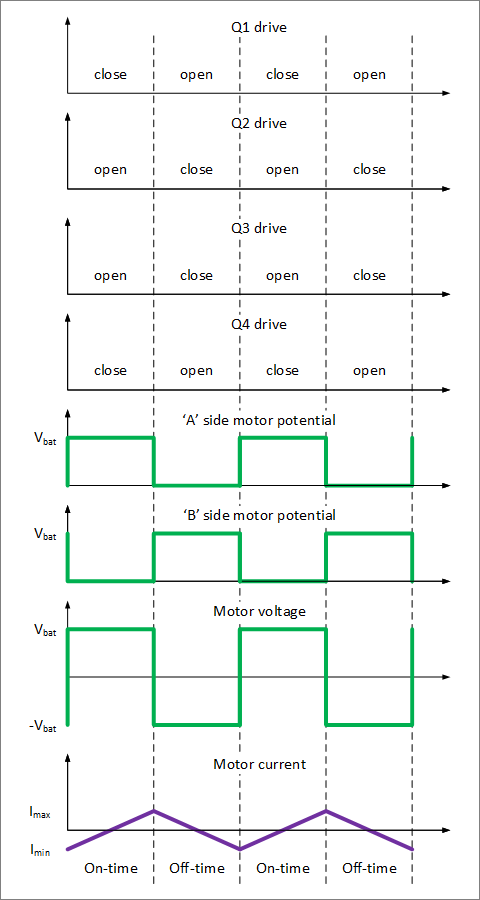
▲ 互鎖相位驅動模式下橋電路的輸出與負載的電壓電流波形
在單極性(極性-幅值)驅動模式下,H橋電路只有通常只有兩個晶體管做高頻開關動作,電路損耗較小。但往往由于回路中的電阻存在,使得電機電流與PWM波形之間不再是線性關系。可以參見博文「磁鐵驅動反向續流串接電阻的的分析」[3]中的電路實驗結果。
在雙極性(互鎖相位)驅動模式下,四個功率晶體管都需要同時做高頻開關動作,電路損耗相對較大。但電路控制負載的電流輸出是線性的關系。
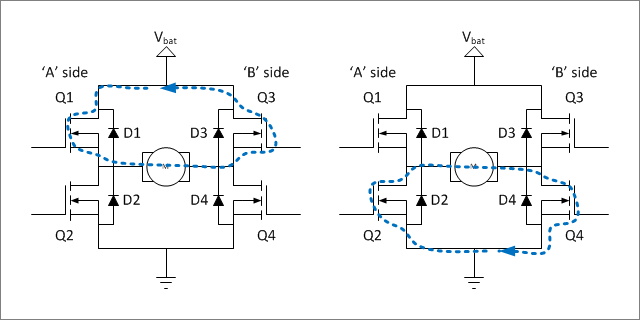
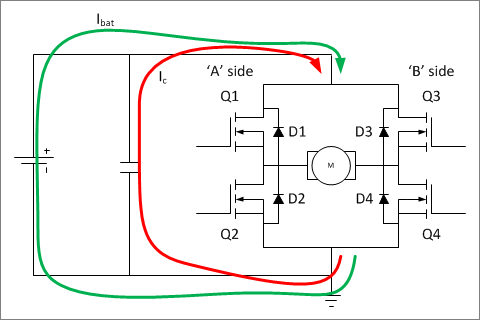
下圖給出了電機在雙極性驅動模式下,正向電流與反向續流過程中的電流回路。由于兩個過程只是極性相反,但電壓相同,所以電機的平均電流與PWM的占空比呈現線性正比的關系。
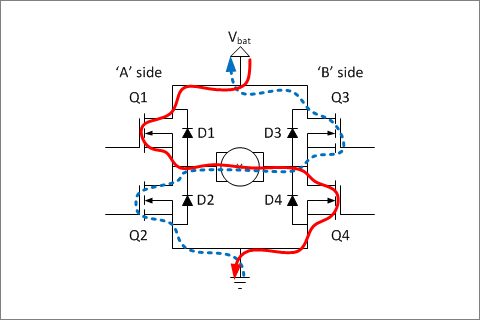
▲ 電機在雙極性PWM驅動下正向導通與反向續流的回路
雙極性PWM模式還可允許電機工作在四項限(正向運行、正向發電、反向運行、反向發電)的模式下,在驅動大功率電機時會效率更高。
原文作者分別在「Sign-Magnitude Drive」[4]和「Lock Anti-Phase Drive」博文中給出了兩種PWM模式下電機負載的電流與PWM占空比之間的關系。為了不嚇走本文一般的讀者,就不再引用他的很多結論在這了。感興趣的同學可以自行推導,或者參見原文。
03供電電源
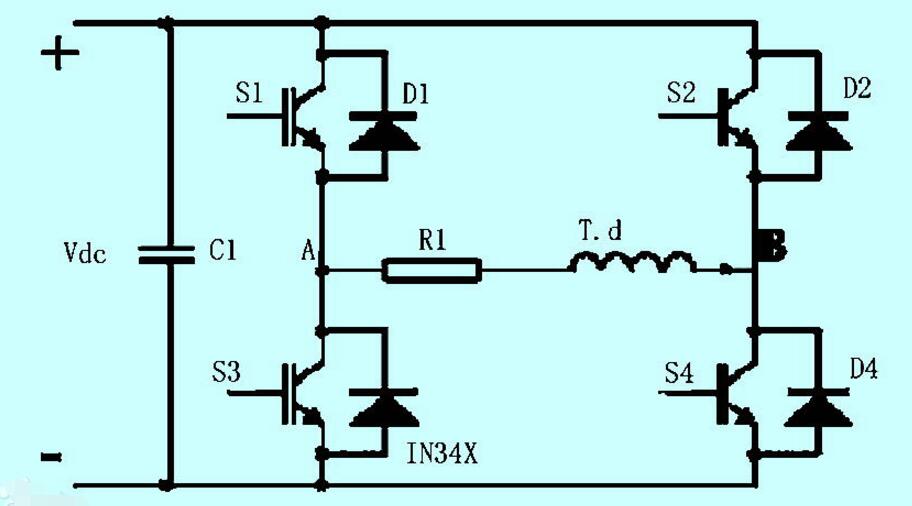
橋電路的供電電源通常會并聯有大容量儲能電容來穩定電源電壓,此時橋電路被稱為電壓工作模式。與此對應的,也有的橋電路是在電壓源線上串聯大容量平波電感,此時通常是做逆變電源使用,被稱為電流工作模式。
對于橋電路并聯的儲能電容需要考慮:
它需要能夠Hold的住多大的負載電感所產生的反向電流?
電路能夠容忍多大的電壓波動?
橋電路的開關頻率是多少?
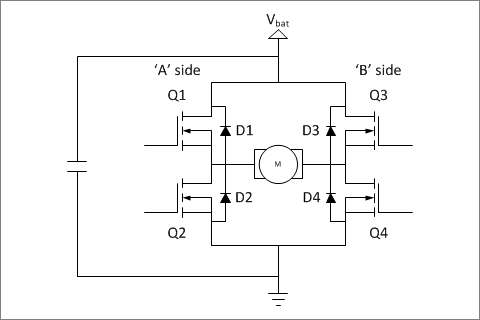
▲ 電源帶有濾波電容的H橋電路
下圖顯示了由于電機中的電感存在,橋電路不同PWM相位期間橋電路的工作電流波形情況。可以看到在某些情況下,橋電路會反向向電源充入電流的。
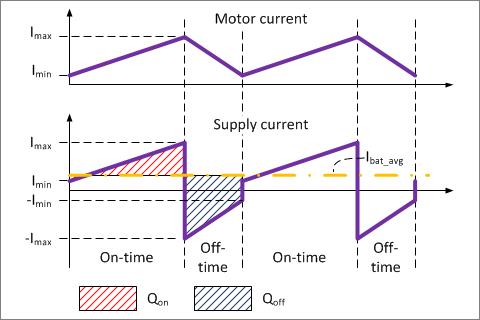
▲ 電機電流與橋電路工作電流波形
如果對于電機負載沒有施加電流反饋控制的話,橋電路并聯電容需要取的更大一些,以此來減輕電機在突然加速和減速過程中所出現的浪涌電流對于電源所造成的波動。下圖給出了橋電路電容與電源并聯為橋電路提供工作電流。
▲ 橋電路并聯電容與電源一起為橋電路供電
原文作者起來他的橋電路三部曲博文中還詳細討論了電機在橋電路驅動下的「過渡過程」、「剎車過程」、「穩態狀態」下的電流波形和分析公式。特別分析了電機在制動過程所對應的「動態剎車」、「發電剎車」兩種不同狀態對于電源的 影響。
04后話
雖然我們不能夠確認原文作者所有的結論、公式都是正確的。但看到他清晰的話語、生動的插圖、詳盡的公式分析反映了他從一個需要設計小型電機H橋電路驅動工程出發 ,不停的在思索橋電路工作的各環節的原理和一些控制細節,并最終后總結成博文。可以體會到他內心在整個知識增長過程中的喜悅。
也許每個人都會有這種喜悅。記錄、表達這種收獲喜悅也許可以繼續激勵你繼續前進。更重要的是,這些記錄有可能在你將來遇到新的問題時候會激發出你新的想法。
審核編輯:湯梓紅
-
二極管
+關注
關注
147文章
9638瀏覽量
166477 -
PWM
+關注
關注
114文章
5186瀏覽量
213919 -
晶體管
+關注
關注
77文章
9692瀏覽量
138178 -
H橋電路
+關注
關注
0文章
27瀏覽量
5878 -
控制電機
+關注
關注
0文章
240瀏覽量
18134
原文標題:?【H橋電路】控制電機的兩種PWM模式詳解
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
H橋電路設計實例、拓撲結構、PCB設計
H橋電路是如何工作的?H橋電路有何作用?
H橋電機驅動電路電路圖 H橋電機驅動電路的工作原理和控制方式





 工商網監
工商網監
評論