") MCU相關(guān)知識科普
MCU相關(guān)知識科普
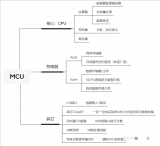
MCU是Microcontroller Unit 的簡稱,中文叫微控制器,俗稱單片機(jī),是把CPU的頻率與規(guī)格做適當(dāng)縮減,并將內(nèi)存、計(jì)數(shù)器、USB、A/D轉(zhuǎn)換、UART、PLC、DMA等周邊接口,甚至LCD驅(qū)動電路都整合在單一芯片上,形成芯片級的計(jì)算機(jī),為不同的應(yīng)用場合做不同組合控制,諸如手機(jī)、PC外圍、遙控器,至汽車電子、工業(yè)上的步進(jìn)馬達(dá)、機(jī)器手臂的控制等,都可見到MCU的身影。
1單片機(jī)發(fā)展簡史
單片機(jī)出現(xiàn)的歷史并不長,但發(fā)展十分迅猛。它的產(chǎn)生與發(fā)展和微處理器(CPU)的產(chǎn)生與發(fā)展大體同步,自1971年美國英特爾公司首先推出4位微處理器以來,它的發(fā)展到目前為止大致可分為5個階段。下面以英特爾公司的單片機(jī)發(fā)展為代表加以介紹。
1971年~1976年
單片機(jī)發(fā)展的初級階段。1971年11月英特爾公司首先設(shè)計(jì)出集成度為2000只晶體管/片的4位微處理器英特爾4004,并配有RAM、 ROM和移位寄存器, 構(gòu)成了第一臺MCS—4微處理器, 而后又推出了8位微處理器英特爾8008, 以及其它各公司相繼推出的8位微處理器。
1976年~1980年
低性能單片機(jī)階段。以1976年英特爾公司推出的MCS—48系列為代表, 采用將8位CPU、 8位并行I/O接口、8位定時/計(jì)數(shù)器、RAM和ROM等集成于一塊半導(dǎo)體芯片上的單片結(jié)構(gòu), 雖然其尋址范圍有限(不大于4 KB), 也沒有串行I/O, RAM、 ROM容量小, 中斷系統(tǒng)也較簡單, 但功能可滿足一般工業(yè)控制和智能化儀器、儀表等的需要。
1980年~1983年
高性能單片機(jī)階段。這一階段推出的高性能8位單片機(jī)普遍帶有串行口,有多級中斷處理系統(tǒng), 多個16位定時器/計(jì)數(shù)器。片內(nèi)RAM、 ROM的容量加大,且尋址范圍可達(dá)64 KB,個別片內(nèi)還帶有A/D轉(zhuǎn)換接口。
1983年~80年代末
16位單片機(jī)階段。1983年英特爾公司又推出了高性能的16位單片機(jī)MCS-96系列,由于其采用了最新的制造工藝, 使芯片集成度高達(dá)12萬只晶體管/片。
1990年代
單片機(jī)在集成度、功能、速度、可靠性、應(yīng)用領(lǐng)域等全方位向更高水平發(fā)展。
2單片機(jī)的分類及應(yīng)用
MCU按其存儲器類型可分為無片內(nèi)ROM型和帶片內(nèi)ROM型兩種。對于無片內(nèi)ROM型的芯片,必須外接EPROM才能應(yīng)用(典型為8031);帶片內(nèi)ROM型的芯片又分為片內(nèi)EPROM型(典型芯片為87C51)、MASK片內(nèi)掩模ROM型(典型芯片為8051)、片內(nèi)Flash型(典型芯片為89C51)等類型。
按用途可分為通用型和專用型;根據(jù)數(shù)據(jù)總線的寬度和一次可處理的數(shù)據(jù)字節(jié)長度可分為8、16、32位MCU。
目前,國內(nèi)MCU應(yīng)用市場最廣泛的是消費(fèi)電子領(lǐng)域,其次是工業(yè)領(lǐng)域、和汽車電子市場。消費(fèi)電子包括家用電器、電視、游戲機(jī)和音視頻系統(tǒng)等。工業(yè)領(lǐng)域包括智能家居、自動化、醫(yī)療應(yīng)用及新能源生成與分配等。汽車領(lǐng)域包括汽車動力總成和安全控制系統(tǒng)等。
3單片機(jī)的基本功能
對于絕大多數(shù)MCU,下列功能是最普遍也是最基本的,針對不同的MCU,其描述的方式可能會有區(qū)別,但本質(zhì)上是基本相同的:
1、TImer(定時器):TImer的種類雖然比較多,但可歸納為兩大類:一類是固定時間間隔的TImer,即其定時的時間是由系統(tǒng)設(shè)定的,用戶程序不可控制,系統(tǒng)只提供幾種固定的時間間隔給用戶程序進(jìn)行選擇,如32Hz,16Hz,8Hz等,此類TImer在4位MCU中比較常見,因此可以用來實(shí)現(xiàn)時鐘、計(jì)時等相關(guān)的功能。
另一類則是Programmable Timer(可編程定時器),顧名思義,該類Timer的定時時間是可以由用戶的程序來控制的,控制的方式包括:時鐘源的選擇、分頻數(shù)(Prescale)選擇及預(yù)制數(shù)的設(shè)定等,有的MCU三者都同時具備,而有的則可能是其中的一種或兩種。此類Timer應(yīng)用非常靈活,實(shí)際的使用也千變?nèi)f化,其中最常見的一種應(yīng)用就是用其實(shí)現(xiàn)PWM輸出。
由于時鐘源可以自由選擇,因此,此類Timer一般均與Event Counter(事件計(jì)數(shù)器)合在一起。
2、IO口:任何MCU都具有一定數(shù)量的IO口,沒有IO口,MCU就失去了與外部溝通的渠道。根據(jù)IO口的可配置情況,可以分為如下幾種類型:
純輸入或純輸出口:此類IO口由MCU硬件設(shè)計(jì)決定,只能是輸入或輸出,不可用軟件來進(jìn)行實(shí)時的設(shè)定。
直接讀寫IO口:如MCS-51的IO口就屬于此類IO口。當(dāng)執(zhí)行讀IO口指令時,就是輸入口;當(dāng)執(zhí)行寫IO口指令則自動為輸出口。
程序編程設(shè)定輸入輸出方向的:此類IO口的輸入或輸出由程序根據(jù)實(shí)際的需要來進(jìn)行設(shè)定,應(yīng)用比較靈活,可以實(shí)現(xiàn)一些總線級的應(yīng)用,如I2C總線,各種LCD、LED Driver的控制總線等。
對于IO口的使用,重要的一點(diǎn)必須牢記的是:對于輸入口,必須有明確的電平信號,確保不能浮空(可以通過增加上拉或下拉電阻來實(shí)現(xiàn));而對于輸出口,其輸出的狀態(tài)電平必須考慮其外部的連接情況,應(yīng)保證在Standby或靜態(tài)狀態(tài)下不存在拉電流或灌電流。
3、外部中斷:外部中斷也是絕大多數(shù)MCU所具有的基本功能,一般用于信號的實(shí)時觸發(fā),數(shù)據(jù)采樣和狀態(tài)的檢測,中斷的方式由上升沿、下降沿觸發(fā)和電平觸發(fā)幾種。外部中斷一般通過輸入口來實(shí)現(xiàn),若為IO口,則只有設(shè)為輸入時其中斷功能才會開啟;若為輸出口,則外部中斷功能將自動關(guān)閉(ATMEL的ATiny系列存在一些例外,輸出口時也能觸發(fā)中斷功能)。外部中斷的應(yīng)用如下:
外部觸發(fā)信號的檢測:一種是基于實(shí)時性的要求,比如可控硅的控制,突發(fā)性信號的檢測等,而另一種情況則是省電的需要。
信號頻率的測量:為了保證信號不被遺漏,外部中斷是最理想的選擇。
數(shù)據(jù)的解碼:在遙控應(yīng)用領(lǐng)域,為了降低設(shè)計(jì)的成本,經(jīng)常需要采用軟件的方式來對各種編碼數(shù)據(jù)進(jìn)行解碼,如Manchester和PWM編碼的解碼。
按鍵的檢測和系統(tǒng)的喚醒:對于進(jìn)入Sleep狀態(tài)的MCU,一般需要通過外部中斷來進(jìn)行喚醒,最基本的形式則是按鍵,通過按鍵的動作來產(chǎn)生電平的變化。
4、通訊接口:MCU所提供的通訊接口一般包括SPI接口,UART,I2C接口等,其分別描述如下:
SPI接口:此類接口是絕大多數(shù)MCU都提供的一種最基本通訊方式,其數(shù)據(jù)傳輸采用同步時鐘來控制,信號包括:SDI(串行數(shù)據(jù)輸入)、SDO(串行數(shù)據(jù)輸出)、SCLK(串行時鐘)及Ready信號;有些情況下則可能沒有Ready信號;此類接口可以工作在Master方式或Slave方式下,通俗說法就是看誰提供時鐘信號,提供時鐘的一方為Master,相反的一方則為Slaver。
UART(Universal Asynchronous Receive Transmit):屬于最基本的一種異步傳輸接口,其信號線只有Rx和Tx兩條,基本的數(shù)據(jù)格式為:Start Bit + Data Bit(7-bits/8-bits) + Parity Bit(Even, Odd or None) + Stop Bit(1~2Bit)。一位數(shù)據(jù)所占的時間稱為Baud Rate(波特率)。
對于大多數(shù)的MCU來講,數(shù)據(jù)位的長度、數(shù)據(jù)校驗(yàn)方式(奇校驗(yàn)、偶校驗(yàn)或無校驗(yàn))、停止位(Stop Bit)的長度及Baud Rate是可以通過程序編程進(jìn)行靈活設(shè)定。此類接口最常用的方式就是與PC機(jī)的串口進(jìn)行數(shù)據(jù)通訊。
I2C接口:I2C是由Philips開發(fā)的一種數(shù)據(jù)傳輸協(xié)議,同樣采用2根信號來實(shí)現(xiàn):SDAT(串行數(shù)據(jù)輸入輸出)和SCLK(串行時鐘)。其最大的好處是可以在此總線上掛接多個設(shè)備,通過地址來進(jìn)行識別和訪問;I2C總線的一個最大的好處就是非常方便用軟件通過IO口來實(shí)現(xiàn),其傳輸?shù)臄?shù)據(jù)速率完全由SCLK來控制,可快可慢,不像UART接口,有嚴(yán)格的速率要求。
5、Watchdog(看門狗定時器):Watchdog也是絕大多數(shù)MCU的一種基本配置(一些4位MCU可能沒有此功能),大多數(shù)的MCU的Watchdog只能允許程序?qū)ζ溥M(jìn)行復(fù)位而不能對其關(guān)閉(有的是在程序燒入時來設(shè)定的,如Microchip PIC系列MCU),而有的MCU則是通過特定的方式來決定其是否打開,如Samsung的KS57系列,只要程序訪問了Watchdog寄存器,就自動開啟且不能再被關(guān)閉。一般而言watchdog的復(fù)位時間是可以程序來設(shè)定的。Watchdog的最基本的應(yīng)用是為MCU因?yàn)橐馔獾墓收隙鴮?dǎo)致死機(jī)提供了一種自我恢復(fù)的能力。
4全球主流單片機(jī)制造商
下面整理了主流廠商的單片機(jī)(可能有些遺漏),排名不分先后,
歐美地區(qū)
1、Freescale+NXP(飛思卡爾+恩智浦):荷蘭,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、LED和普通照明、醫(yī)療保健、多媒體融合、家電和電動工具、樓宇自動化技術(shù)電機(jī)控制、電源和功率轉(zhuǎn)換器、能源和智能電網(wǎng)、自動化、計(jì)算機(jī)與通信基礎(chǔ)設(shè)施。
2、Microchip+Atmel(微芯科技+愛特梅爾):美國,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、工業(yè)用、電機(jī)控制、汽車、樓宇自動化、家用電器、家庭娛樂、工業(yè)自動化、照明、物聯(lián)網(wǎng)、智能能源、移動電子設(shè)備、計(jì)算機(jī)外設(shè)。
3、Cypress+Spansion(賽普拉斯+飛索半導(dǎo)體):美國,主要提供8位、16位、32位MCU。應(yīng)用范圍:汽車電子、家用電器、醫(yī)療、消費(fèi)類電子、通信與電信、工業(yè)、無線。
4、ADI(亞德諾半導(dǎo)體):美國,主要提供8位、16位、32位MCU。應(yīng)用范圍:航空航天與國防、汽車應(yīng)用 、樓宇技術(shù) 、通信 、消費(fèi)電子 、能源 、醫(yī)療保健 、儀器儀表和測量 、電機(jī)、工業(yè)自動化 、安防。
5、Infineon(英飛凌):德國,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、消費(fèi)電子、工程、商用和農(nóng)用車輛、數(shù)據(jù)處理、電動交通、工業(yè)應(yīng)用、醫(yī)療設(shè)備、移動設(shè)備、電機(jī)控制與驅(qū)動、電源、面向摩托車電動自行車與小型電動車、智能電網(wǎng)、照明、太陽能系統(tǒng)解決方案、風(fēng)能系統(tǒng)解決方案。
6、ST Microelectronics(意法半導(dǎo)體):意大利/法國,主要提供32位MCU。應(yīng)用范圍:LED和普通照明、交通運(yùn)輸、醫(yī)療保健、多媒體融合、家電和電動工具、樓宇自動化技術(shù)電機(jī)控制、電源和功率轉(zhuǎn)換器、能源和智能電網(wǎng)、自動化、計(jì)算機(jī)與通信基礎(chǔ)設(shè)施。
7、Qualcomm(高通):美國,主要提供16位,32位MCU。應(yīng)用范圍:智能手機(jī)、平板電腦、無線調(diào)制解調(diào)器。
8、Texas Instruments(德州儀器):美國,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、消費(fèi)電子、醫(yī)療設(shè)備、移動設(shè)備、通信。
9、Maxim(美信):美國,主要提供32位MCU。應(yīng)用范圍:汽車電子、消費(fèi)電子、工業(yè)應(yīng)用、安防。
日韓地區(qū)
1、Renesas(瑞薩):日本,主要提供16位、32位MCU。應(yīng)用范圍:電腦及外設(shè)、消費(fèi)類電子、健康醫(yī)療電子、汽車電子、工業(yè)、通信。
2、Toshiba(東芝):日本,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、工業(yè)用、電機(jī)控制、無線通信、移動電話、電腦與周邊設(shè)備、影像及音視頻、消費(fèi)類(家電)、LED照明、安全、電源管理、娛樂設(shè)備。
3、Fujitsu(富士通):日本,主要提供32位MCU。應(yīng)用范圍:汽車、醫(yī)療、機(jī)械,家電。
4、Samsung Electronics(三星電子):韓國,主要提供16位、32位MCU。應(yīng)用范圍:汽車電子、工業(yè)用、電機(jī)控制、汽車、樓宇自動化、家用電器、家庭娛樂、工業(yè)自動化、照明、物聯(lián)網(wǎng)、智能能源、移動電子設(shè)備、計(jì)算機(jī)外設(shè)。
中國地區(qū)
中國大陸地區(qū)
1、希格瑪微電子:主要提供32位MCU,應(yīng)用范圍:電信、制造、能源、交通、電力等。
2、珠海歐比特:主要提供32位MCU,應(yīng)用范圍:航空航天:星箭站船、飛行器;高端工控:嵌入式計(jì)算機(jī);艦船控制、工業(yè)控制、電力設(shè)備、環(huán)境監(jiān)控。
3、兆易創(chuàng)新:主要提供32位MCU,應(yīng)用范圍:工業(yè)自動化、人機(jī)界面、電機(jī)控制、安防監(jiān)控、智能家居、物聯(lián)網(wǎng)。
4、晟矽微電子:主要提供8位、32位MCU,應(yīng)用范圍:小家電、消費(fèi)類電子、遙控器、鼠標(biāo)、鋰電池、數(shù)碼產(chǎn)品、汽車電子、醫(yī)療儀器及計(jì)量、玩具、工業(yè)控制、智能家居及安防等領(lǐng)域。
5、芯海科技:主要提供16、32位MCU,應(yīng)用范圍:儀器儀表、物聯(lián)網(wǎng)、消費(fèi)電子、家電、汽車電子。
6、聯(lián)華集成電路:主要提供8位、16位MCU,應(yīng)用范圍:消費(fèi)電子、白色家電、工業(yè)控制、通信設(shè)備、汽車電子、計(jì)算機(jī)。
7、珠海建榮:主要提供8位MCU,應(yīng)用范圍:家用電器 、移動電源。
8、炬芯科技:主要提供8位至32位MCU,應(yīng)用范圍:平板電腦、智能家居、多媒體、藍(lán)牙、wifi音頻。
9、愛思科微電子:主要提供8位、16位MCU,應(yīng)用范圍:消費(fèi)類芯片、通訊類芯片、信息類芯片、家電。
10、華芯微電子:主要提供8位、4位MCU,應(yīng)用范圍:衛(wèi)星接收器、手機(jī)充電器、萬年歷、多合一遙控器。
11、上海貝嶺(華大半導(dǎo)體控股):主要提供8位、16位、32位MCU,應(yīng)用范圍:計(jì)算機(jī)周邊、HDTV、電源管理、小家電、數(shù)字家電。
12、海爾集成電路:主要提供14位、15位、16位MCU,應(yīng)用范圍:消費(fèi)電子、汽車電子、工業(yè)、智能儀表。
13、北京君正:主要提供32位MCU,應(yīng)用范圍:可穿戴式設(shè)備、物聯(lián)網(wǎng)、智能家電、汽車、消費(fèi)類電子、平板電腦。
14、中微半導(dǎo)體:主要提供8位MCU,應(yīng)用范圍:智能家電、汽車電子、安防監(jiān)控、LED照明及景觀、智能玩具、智能家居、消費(fèi)類電子。
15、神州龍芯集成電路:主要提供32位MCU,應(yīng)用范圍:電力監(jiān)控、智能電網(wǎng)、工業(yè)數(shù)字控制、物聯(lián)網(wǎng)、智能家居、數(shù)據(jù)監(jiān)控。
16、紫光微電子:主要提供8位、16位MCU,應(yīng)用范圍:智能家電。
17、時代民芯:主要提供32位MCU,應(yīng)用范圍:汽車導(dǎo)航、交通監(jiān)控、漁船監(jiān)管、電力電信網(wǎng)絡(luò)。
18、華潤矽科微電子(華潤微旗下公司):主要提供8位、16位MCU,應(yīng)用范圍:消費(fèi)電子、工業(yè)控制、家電。
19、國芯科技:主要提供32位MCU,應(yīng)用范圍:信息安全領(lǐng)域 、辦公自動化領(lǐng)域、通訊網(wǎng)絡(luò)領(lǐng)域、 信息安全領(lǐng)域。
20、中天微:主要提供32位MCU,應(yīng)用范圍:智能手機(jī)、數(shù)字電視、機(jī)頂盒、汽車電子、GPS、電子閱讀器、打印機(jī)。
21、華潤微電子:主要提供8位、16位MCU,應(yīng)用范圍:家電,消費(fèi)類電子、工業(yè)自動化控制的通用控制電路。
22、中穎電子:主要提供4位、8位、16位、32位MCU,應(yīng)用范圍:家電、電機(jī)。
23、靈動微電子:主要提供32位,應(yīng)用范圍:電機(jī)控制、藍(lán)牙控制、高清顯示、無線充、無人機(jī)、微型打印機(jī)、智能標(biāo)簽、電子煙、LED點(diǎn)陣屏等。
24、新唐科技:主要提供32位MCU,應(yīng)用范圍:照明、物聯(lián)網(wǎng)等。
25、東軟載波:主要提供8位、32位MCU,應(yīng)用范圍:家電、智能家居、儀器儀表、液晶面板控制器、工業(yè)控制等。
26、貝特萊:主要提供32位MCU,應(yīng)用范圍:智能家居、工業(yè)控制以及消費(fèi)類產(chǎn)品領(lǐng)域。
27、笙泉科技:主要提供8位MCU,應(yīng)用范圍:車用、教育、工控、醫(yī)療等中小型顯示面板。
28、航順芯片:主要提供32位MCU,應(yīng)用范圍:汽車、物聯(lián)網(wǎng)、消費(fèi)類、工業(yè)類等。
29、復(fù)旦微電子:主要提供16位、32位MCU,應(yīng)用范圍:智能電表、智能門鎖等。
30、華大半導(dǎo)體:主要提供8位、16位、32位MCU,應(yīng)用范圍:工業(yè)控制、智能制造、智慧生活及物聯(lián)網(wǎng)等。
中國臺灣地區(qū)
1、宏晶科技:主要提供8位MCU。應(yīng)用范圍:通信、工業(yè)控制、信息家電、語音。
2、盛群半導(dǎo)體:主要提供8位、32位MCU。應(yīng)用范圍:消費(fèi)電子、LED照明等。
3、凌陽科技:主要提供8位、16位MCU。應(yīng)用范圍:家庭影音。
4、中穎電子:主要提供4位、8位MCU。應(yīng)用范圍:充電器、移動電源、家電、工業(yè)控制。
5、松翰科技:主要提供8位、32位MCU。應(yīng)用范圍:搖控器、智能型充電器、大小系統(tǒng)、電子秤、耳溫槍、血壓計(jì)、胎壓計(jì)、各類量測及健康器材。
6、華邦電子:主要提供8位、16位MCU。應(yīng)用范圍:車用電子、工業(yè)電子、網(wǎng)絡(luò)、計(jì)算機(jī)、消費(fèi)電子、物聯(lián)網(wǎng)。
7、十速科技:主要提供4位、8位、51位MCU。應(yīng)用范圍:遙控器、小家電。
8、佑華微電子:主要提供4位、8位MCU。應(yīng)用范圍:錄音集成電路產(chǎn)品、消費(fèi)電子、家用產(chǎn)品。
9、應(yīng)廣科技單片機(jī):主要提供4位、8位MCU。應(yīng)用范圍:機(jī)械、自動化、家電、機(jī)器人。
10、義隆電子:主要提供8位、16位MCU。應(yīng)用范圍:消費(fèi)電子、電腦、智能手機(jī)。
5單片機(jī)的學(xué)習(xí)竅門
任何一款MCU,其基本原理和功能都是大同小異,所不同的只是其外圍功能模塊的配置及數(shù)量、指令系統(tǒng)等。
對于指令系統(tǒng),雖然形式上看似千差萬別,但實(shí)際上只是符號的不同,其所代表的含義、所要完成的功能和尋址方式基本上是類似的。
要了解一款MCU,首先需要知道就是其ROM空間、RAM空間、IO口數(shù)量、定時器數(shù)量和定時方式、所提供的外圍功能模塊(Peripheral Circuit)、中斷源、工作電壓及功耗等等。
了解這些MCU Features后,接下來第一步就是將所選MCU的功能與實(shí)際項(xiàng)目開發(fā)的要求的功能進(jìn)行對比,明確哪些資源是目前所需要的,哪些是本項(xiàng)目所用不到的。
對于項(xiàng)目中需要用到的而所選MCU不提供的功能,則需要認(rèn)真理解MCU的相關(guān)資料,以求用間接的方法來實(shí)現(xiàn),例如,所開發(fā)的項(xiàng)目需要與PC機(jī)COM口進(jìn)行通訊,而所選的MCU不提供UART口,則可以考慮用外部中斷的方式來實(shí)現(xiàn)。
對于項(xiàng)目開發(fā)需要用到的資源,則需要對其Manua*進(jìn)行認(rèn)真的理解和閱讀,而對于不需要的功能模塊則可以忽略或?yàn)g覽即可。對于MCU學(xué)習(xí)來講,應(yīng)用才是關(guān)鍵,也是最主要的目的。
明確了MCU的相關(guān)功能后,接下來就可以開始編程了。
對于初學(xué)者或初次使用此款MCU的設(shè)計(jì)者來說,可能會遇到很多對MCU的功能描述不明確的地方,對于此類問題,可以通過兩種方法來解決,一種是編寫特別的驗(yàn)證程序來理解資料所述的功能;另一種則可以暫時忽略,單片機(jī)程序設(shè)計(jì)中則按照自己目前的理解來編寫,留到調(diào)試時去修改和完善。前一種方法適用于時間較寬松的項(xiàng)目和初學(xué)者,而后一種方法則適合于具有一定單片機(jī)開發(fā)經(jīng)驗(yàn)的人或項(xiàng)目進(jìn)度較緊迫的情況。
指令系統(tǒng)千萬不要特別花時間去理解。指令系統(tǒng)只是一種邏輯描述的符號,只有在編程時根據(jù)自己的邏輯和程序的邏輯要求來查看相關(guān)的指令即可,而且隨著編程的進(jìn)行,對指令系統(tǒng)也會越來越熟練,甚至可以不自覺地記憶下來。
6單片機(jī)的程序編寫
MCU的程序的編寫與PC下的程序的編寫存在很大的區(qū)別,雖然現(xiàn)在基于C的MCU開發(fā)工具越來越流行,但對于一個高效的程序代碼和喜歡使用匯編的設(shè)計(jì)者來講,匯編語言仍然是最簡潔、最有效的編程語言。
對于MCU的程序編寫,其基本的框架可以說是大體一致的,一般分為初始化部分(這是MCU程序設(shè)計(jì)與PC最大的不同),主程序循環(huán)體和中斷處理程序三大部分,其分別說明如下:
1、初始化:對于所有的MCU程序的設(shè)計(jì)來講,初始化是最基本也是最重要的一步,一般包括如下內(nèi)容:
屏蔽所有中斷并初始化堆棧指針:初始化部分一般不希望有任何中斷發(fā)生。
清除系統(tǒng)的RAM區(qū)域和顯示Memory:雖然有時可能沒有完全的必要,但從可靠性及一致性的角度出發(fā),特別是對于防止意外的錯誤,還是建議養(yǎng)成良好的編程習(xí)慣。
IO口的初始化:根據(jù)項(xiàng)目的應(yīng)用的要求,設(shè)定相關(guān)IO口的輸入輸出方式,對于輸入口,需要設(shè)定其上拉或下拉電阻;對于輸出口,則必須設(shè)定其初始的電平輸出,以防出現(xiàn)不必要的錯誤。
中斷的設(shè)置:對于所有項(xiàng)目需要用到的中斷源,應(yīng)該給予開啟并設(shè)定中斷的觸發(fā)條件,而對于不使用的多余的中斷,則必須給予關(guān)閉。
其他功能模塊的初始化:對于所有需要用到的MCU的外圍功能模塊,必須按項(xiàng)目的應(yīng)用的要求進(jìn)行相應(yīng)的設(shè)置,如UART的通訊,需要設(shè)定Baud Rate,數(shù)據(jù)長度,校驗(yàn)方式和Stop Bit的長度等,而對于Programmer Timer,則必須設(shè)置其時鐘源,分頻數(shù)及Reload Data等。
參數(shù)的初始化:完成了MCU的硬件和資源的初始化后,接下來就是對程序中使用到的一些變量和數(shù)據(jù)的初始化設(shè)置,這一部分的初始化需要根據(jù)具體的項(xiàng)目及程序的總體安排來設(shè)計(jì)。對于一些用EEPROM來保存項(xiàng)目預(yù)制數(shù)的應(yīng)用來講,建議在初始化時將相關(guān)的數(shù)據(jù)拷貝到MCU的RAM,以提高程序?qū)?shù)據(jù)的訪問速度,同時降低系統(tǒng)的功耗(原則上,訪問外部EEPROM都會增加電源的功耗)。
2、主程序循環(huán)體:大多數(shù)MCU是屬于長時間不間斷運(yùn)行的,因此其主程序體基本上都是以循環(huán)的方式來設(shè)計(jì),對于存在多種工作模式的應(yīng)用來講,則可能存在多個循環(huán)體,相互之間通過狀態(tài)標(biāo)志來進(jìn)行轉(zhuǎn)換。對于主程序體,一般情況下主要安排如下的模塊:
計(jì)算程序:計(jì)算程序一般比較耗時,因此堅(jiān)決反對放在任何中斷中處理,特別是乘除法運(yùn)算。
實(shí)時性要求不高或沒有實(shí)時性要求的處理程序;
顯示傳輸程序:主要針對存在外部LED、LCD Driver的應(yīng)用。
3、中斷處理程序:中斷程序主要用于處理實(shí)時性要求較高的任務(wù)和事件,如,外部突發(fā)性信號的檢測,按鍵的檢測和處理,定時計(jì)數(shù),LED顯示掃描等。
一般情況下,中斷程序應(yīng)盡可能保證代碼的簡潔和短小,對于不需要實(shí)時去處理的功能,可以在中斷中設(shè)置觸發(fā)的標(biāo)志,然后由主程序來執(zhí)行具體的事務(wù)――這一點(diǎn)非常重要,特別是對于低功耗、低速的MCU來講,必須保證所有中斷的及時響應(yīng)。
4、對于不同任務(wù)體的安排,不同的MCU其處理的方法也有所不同:
例如,對于低速、低功耗的MCU(Fosc=32768Hz)應(yīng)用,考慮到此類項(xiàng)目均為手持式設(shè)備和采用普通的LCD顯示,對按鍵的反應(yīng)和顯示的反應(yīng)要求實(shí)時性較高,因此一般采用定時中斷的方式來處理按鍵的動作和數(shù)據(jù)的顯示;而對于高速的MCU,如Fosc》1MHz的應(yīng)用,由于此時MCU有足夠的時間來執(zhí)行主程序循環(huán)體,因此可以只在相應(yīng)的中斷中設(shè)置各種觸發(fā)標(biāo)志,并將所有的任務(wù)放在主程序體中來執(zhí)行。
5、在MCU的程序設(shè)計(jì)中,還需要特別注意的一點(diǎn)就是:
要防止在中斷和主程序體中同時訪問或設(shè)置同一個變量或數(shù)據(jù)的情況。有效的預(yù)防方法是,將此類數(shù)據(jù)的處理安排在一個模塊中,通過判斷觸發(fā)標(biāo)志來決定是否執(zhí)行該數(shù)據(jù)的相關(guān)操作;而在其他的程序體中(主要是中斷),對需要進(jìn)行該數(shù)據(jù)的處理的地方只設(shè)置觸發(fā)的標(biāo)志。――這可以保證數(shù)據(jù)的執(zhí)行是可預(yù)知和唯一的。
1、要養(yǎng)成總結(jié)的好習(xí)慣,總結(jié)不僅是對自己學(xué)習(xí)的一個總結(jié),還是對學(xué)習(xí)過程的一個回顧與加深,還可避免第二次犯錯。
2、編寫程序之前先要有一個對該項(xiàng)目熟悉的了解,做到心中有數(shù),列一個大致框架。仔細(xì)推敲該怎么布局,怎樣布局最合理,該步驟很重要。要分析先做哪個模塊,具體到該模塊的具體步驟,各個函數(shù)怎么命名,與其他模塊的銜接等。最好拿張紙記下重要過程。
3、對于c語言的模塊化編程,要先分好各個模塊,一個模塊一個模塊的編程,確定一個順序,按順序來,該模塊成功之后再編寫下一個。對于頭文件,當(dāng)該模塊編寫好之后再編寫該模塊的頭文件。
4、出現(xiàn)警告不要忽視,說明該程序一定有不合理之處,要弄清其來源,找到解決辦法。找來源時要有針對性,可上網(wǎng)搜一下該方面的資料,或向別人請教。例如,居然把另一個工程內(nèi)的main函數(shù)加入了這個工程。還有居然函數(shù)命名重復(fù)。還有根據(jù)實(shí)驗(yàn)現(xiàn)象分析原因,層層遞進(jìn)。還有端口定義時居然選錯了接口。有時,實(shí)在解決不了就休息一下,在想也挺好的。再簡單的地方也要注意一下,都有可能出錯。
在單片機(jī)應(yīng)用開發(fā)中,代碼的使用效率問題、單片機(jī)抗干擾性和可靠性等問題仍困擾著。現(xiàn)歸納出單片機(jī)開發(fā)中應(yīng)掌握的幾個基本技巧。
8單片機(jī)開發(fā)技巧
1.如何減少程序中的bug
對于如何減少程序的bug,應(yīng)該先考慮系統(tǒng)運(yùn)行中應(yīng)考慮的超范圍管理參數(shù)如下。
物理參數(shù):這些參數(shù)主要是系統(tǒng)的輸入?yún)?shù),它包括激勵參數(shù)、采集處理中的運(yùn)行參數(shù)和處理結(jié)束的結(jié)果參數(shù)。
資源參數(shù):這些參數(shù)主要是系統(tǒng)中的電路、器件、功能單元的資源,如記憶體容量、存儲單元長度、堆疊深度。
應(yīng)用參數(shù):這些應(yīng)用參數(shù)常表現(xiàn)為一些單片機(jī)、功能單元的應(yīng)用條件。過程參數(shù):指系統(tǒng)運(yùn)行中的有序變化的參數(shù)。
2.如何提高C語言編程代碼的效率
用C語言進(jìn)行單片機(jī)程序設(shè)計(jì)是單片機(jī)開發(fā)與應(yīng)用的必然趨勢。如果使用C編程時,要達(dá)到最高的效率,最好熟悉所使用的C編譯器。先試驗(yàn)一下每條C語言編譯以后對應(yīng)的匯編語言的語句行數(shù),這樣就可以很明確的知道效率。在今后編程的時候,使用編譯效率最高的語句。各家的C編譯器都會有一定的差異,故編譯效率也會有所不同,優(yōu)秀的嵌入式系統(tǒng)C編譯器代碼長度和執(zhí)行時間僅比以匯編語言編寫的同樣功能程度長5-20%。
對于復(fù)雜而開發(fā)時間緊的項(xiàng)目時,可以采用C語言,但前提是要求你對該MCU系統(tǒng)的C語言和C編譯器非常熟悉,特別要注意該C編譯系統(tǒng)所能支持的數(shù)據(jù)類型和算法。雖然C語言是最普遍的一種高級語言,但由于不同的MCU廠家其C語言編譯系統(tǒng)是有所差別的,特別是在一些特殊功能模塊的操作上。所以如果對這些特性不了解,那么調(diào)試起來問題就會很多,反而導(dǎo)致執(zhí)行效率低于匯編語言。
3.如何解決單片機(jī)的抗干擾性問題
防止干擾最有效的方法是去除干擾源、隔斷干擾路徑,但往往很難做到,所以只能看單片機(jī)抗干擾能力夠不夠強(qiáng)了。在提高硬件系統(tǒng)抗干擾能力的同時,軟件抗干擾以其設(shè)計(jì)靈活、節(jié)省硬件資源、可靠性好越來越受到重視。
單片機(jī)干擾最常見的現(xiàn)象就是復(fù)位,至于程序跑飛,其實(shí)也可以用軟件陷阱和看門狗將程序拉回到復(fù)位狀態(tài),所以單片機(jī)軟件抗干擾最重要的是處理好復(fù)位狀態(tài)。
一般單片機(jī)都會有一些標(biāo)志寄存器,可以用來判斷復(fù)位原因;另外你也可以自己在RAM中埋一些標(biāo)志。在每次程序復(fù)位時,通過判斷這些標(biāo)志,可以判斷出不同的復(fù)位原因;還可以根據(jù)不同的標(biāo)志直接跳到相應(yīng)的程序。這樣可以使程序運(yùn)行有連續(xù)性,用戶在使用時也不會察覺到程序被重新復(fù)位過。
4.如何測試單片機(jī)系統(tǒng)的可靠性
當(dāng)一個單片機(jī)系統(tǒng)設(shè)計(jì)完成,對于不同的單片機(jī)系統(tǒng)產(chǎn)品會有不同的測試項(xiàng)目和方法,但是有一些是必須測試的:
測試單片機(jī)軟件功能的完善性
上電、掉電測試
老化測試
ESD和EFT等測試
有時候,我們還可以模擬人為使用中,可能發(fā)生的破壞情況。例如用人體或者衣服織物故意摩擦單片機(jī)系統(tǒng)的接觸端口,由此測試抗靜電的能力。用大功率電鉆靠近單片機(jī)系統(tǒng)工作,由此測試抗電磁干擾能力等。
綜上所述,單片機(jī)已成為計(jì)算機(jī)發(fā)展和應(yīng)用的一個重要方面,單片機(jī)應(yīng)用的重要意義還在于,它從根本上改變了傳統(tǒng)的控制系統(tǒng)設(shè)計(jì)思想和設(shè)計(jì)方法。
從前必須由模擬電路或數(shù)字電路實(shí)現(xiàn)的大部分功能,現(xiàn)在已能用單片機(jī)通過軟件方法來實(shí)現(xiàn)了。這種軟件代替硬件的控制技術(shù)也稱為微控制技術(shù),是傳統(tǒng)控制技術(shù)的一次革命。
此外在開發(fā)和應(yīng)用過程中我們更要掌握技巧,提高效率,以便于發(fā)揮它更加廣闊的用途。
9芯片操作總結(jié)
對芯片的操作主要是對芯片內(nèi)寄存器的操作,芯片內(nèi)寄存器在存儲器上映射的都有自己的唯一地址,這也就是對相應(yīng)的地址的操作。看芯片,首先看時序圖,再了解相應(yīng)的寄存器,了解是如何操作的,定義需要的端口(程序可以識別),編寫寫操作程序和讀操作程序。
如何往芯片內(nèi)寫入數(shù)據(jù),如何讀出數(shù)據(jù),通過哪個端口輸入或讀出(最主要的地方)。
通過總線連接芯片時,首先要了解該總線的協(xié)議。I2c總線連接的芯片,主要通過該總線去控制該芯片。
1、點(diǎn)陣中一個74hc595用于列的選擇,令外兩個用于顏色的選擇,點(diǎn)陣相當(dāng)于二極管的集合,
一端給高電平,另一端給低電平,二極管才能亮。只是一端選擇不同時,亮不同的顏色。
定時器工作模式的選擇:高四位是設(shè)置定時器T1,低四位設(shè)置T0。然后各模式的后兩位設(shè)置工作模式。當(dāng)設(shè)置兩個定時器時,注意使用或(|)。當(dāng)用中斷時,注意進(jìn)入中斷后,該清零的要清零。
2、串口收發(fā):波特率的設(shè)置一般用模式2(自動重裝初值),因?yàn)椴煌难b置,處理數(shù)據(jù)的能力不同,設(shè)置波特率主要為了照顧低速裝置及為了彼此間的通訊。中斷標(biāo)志位要軟件清零。設(shè)置串口中斷時,收發(fā)無論哪一個產(chǎn)生都能進(jìn)入中斷函數(shù),因此要注意設(shè)置中斷函數(shù)。(自我感覺一般設(shè)置一種功能,當(dāng)做上位機(jī)或下位機(jī))。
發(fā)送用中斷的話,要解決第一次該怎么進(jìn)入中斷,因此首先要發(fā)送一次,此后就可以進(jìn)入中斷了。一次只能發(fā)一字節(jié),而且只有在TI置一之后才能發(fā)送下一位。
3、Pcf8591ad轉(zhuǎn)換,有四個通道的輸入,讀pcf8591時,選通哪一個通道,讀的就是那個通道輸入的電壓,轉(zhuǎn)換后的數(shù)據(jù)存儲在該芯片內(nèi),再讀出。讀時先寫芯片的地址,在寫器件的子地址(0x40|通道號),然后就是讀出的數(shù)據(jù)。
4、Da轉(zhuǎn)換是先向芯片內(nèi)寫入器件地址,在寫子地址(0x40),在寫要轉(zhuǎn)換的數(shù)字量。器件地址芯片資料有介紹。
5、對于液晶顯示,寫入數(shù)據(jù)顯示后,他會一直顯示,不用持續(xù)刷新,要想改變,只有重新輸入。
6、對于ds1302時鐘芯片,讀數(shù)據(jù)時是在寫入數(shù)據(jù)時的第八個時鐘下降沿就讀出第一位數(shù)據(jù)的的,然后再為下次輸出做準(zhǔn)備,注意程序的寫法,還要注意返回值放的位置。
7、Ds1302中先指明寄存器,再向其中寫入數(shù)據(jù)。芯片資料上的寄存器標(biāo)出的是地址。(寫保護(hù)處程序還不大明白,不是一直都有寫入嗎?為什么還打開寫保護(hù)?)
(根據(jù)前面的大俠,可以在初始化時間后設(shè)一標(biāo)志,有此標(biāo)志則不用再初始化時間。但是如果斷電后,MCU的RAM是無法保存這個標(biāo)志的,因此可以用DS1302的RAM保存該標(biāo)志,待上電后讀取該標(biāo)志。我也是初學(xué)者,最近也打算用DS1302。不知說法對不,我也還沒具體實(shí)施,多交流)
8、初始化最好還要寫一下,以防以后忘記。有時注意讀出或?qū)懭霑r,首先操作的是最低位還是最高位,可根據(jù)時序圖判斷出。
9、對于紅外收發(fā),接收時,他是根據(jù)兩個下降沿之間的時間長短來確定是高電平還是低電平,寫程序時,先用定時器確定時間長短,保存,然后再轉(zhuǎn)化成二進(jìn)制(該程序?qū)懛ǘ嗫纯矗芎茫?/p>
10、步進(jìn)電機(jī):主要做開關(guān)用,步進(jìn)電機(jī)的力矩隨轉(zhuǎn)速的升高而降低。主要用在機(jī)床上零部件加工的自動進(jìn)給。對有較高精度的控制場所都可也使用。
步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
11、伺服電機(jī):(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應(yīng),在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時間常數(shù)小、線性度高、始動電壓等特性,可把所收到的電信號轉(zhuǎn)換成電動機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動機(jī)兩大類,其主要特點(diǎn)是,當(dāng)信號電壓為零時無自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
直流電機(jī):范圍較大,小車上都是。
12、漢字概覽:
為了將漢字在顯示器或打印機(jī)上輸出,把漢字按圖形符號設(shè)計(jì)成點(diǎn)陣圖,就得到了相應(yīng)的點(diǎn)陣代碼(字形碼)。
為在計(jì)算機(jī)內(nèi)表示漢字而統(tǒng)一的編碼方式形成漢字編碼叫內(nèi)碼(如國標(biāo)碼),內(nèi)碼是惟一的(相當(dāng)于該字的身份證號)。為方便漢字輸入而形成的漢字編碼為輸入碼,屬于漢字的外碼,輸入碼因編碼方式不同而不同,是多種多樣的。為顯示和打印輸出漢字而形成的漢字編碼為字形碼,計(jì)算機(jī)通過漢字內(nèi)碼在字模庫中找出漢字的字形碼,實(shí)現(xiàn)其轉(zhuǎn)換。
機(jī)內(nèi)碼
根據(jù)國標(biāo)碼的規(guī)定,每一個漢字都有了確定的二進(jìn)制代碼,但是這個代碼在計(jì)算機(jī)內(nèi)部處理時會與ASCII碼發(fā)生沖突,為解決這個問題,把國標(biāo)碼的每一個字節(jié)的首位上加1。由于ASCII碼只用7位,所以,這個首位上的“1”就可以作為識別漢字代碼的標(biāo)志,計(jì)算機(jī)在處理到首位是“1”的代碼時把它理解為是漢字的信息,在處理到首位是“0”的代碼時把它理解為是ASCII碼。經(jīng)過這樣處理后的國標(biāo)碼(內(nèi)碼)就是機(jī)內(nèi)碼。
如果我們把這個“口”字圖形的“.”處用“0”代替,就可以很形象地得到“口”的字形碼:0000H 0004H 3FFAH 2004H 2004H 2004H 2004H 2004H 2004H 2004H 2004H2004H 3FFAH 2004H 0000H 0000H。計(jì)算機(jī)要輸出“口”時,先找到顯示字庫的首址,根據(jù)“口”的機(jī)內(nèi)碼經(jīng)過計(jì)算,再去找到“口”的字形碼,然后根據(jù)字形碼(要用二進(jìn)制)通過字符發(fā)生器的控制在屏幕上進(jìn)行依次掃描,其中二進(jìn)制代碼中是“0”的地方空掃,是“1”的地方掃出亮點(diǎn),于是就可以得到“口”的字符圖形。
漢字字模按國標(biāo)碼的順序排列,以二進(jìn)制文件形式存放在存儲器中,構(gòu)成漢字字模字庫,亦稱為漢字字形庫,稱漢字庫
兩種編碼方法,見頭文件
GB1616.h//------------------ 漢字字模的數(shù)據(jù)結(jié)構(gòu)定義 ------------------------//
struct typFNT_GB16 //漢字字模數(shù)據(jù)結(jié)構(gòu)
{
unsignedchar Index[3]; //漢字內(nèi)碼索引
unsignedchar Msk[32]; //點(diǎn)陣碼數(shù)據(jù)
};
/////////////////////////////////////////////////////////////////////////
// 漢字字模表 //
// 漢字庫: 宋體16.dot,橫向取模左高位,數(shù)據(jù)排列:從左到右從上到下 //
/////////////////////////////////////////////////////////////////////////
conststruct typFNT_GB16 codeGB_16[]= //數(shù)據(jù)表
{
/*------------------------------------------------------------------------------
; 源文件 /文字 :徐
; 寬×高(像素):16×16
------------------------------------------------------------------------------*/
"徐",0x10,0x80,0x10,0x80,0x21,0x40,0x42,0x20,0x94,0x10,0x1B,0xEC,0x20,0x80,0x60,0x80,
0xAF,0xF8,0x20,0x80,0x22,0xA0,0x24,0x90,0x2A,0x88,0x21,0x00,0x00,0x00,0x00,0x00,
這個結(jié)構(gòu),很簡單的:一個是內(nèi)碼,一個點(diǎn)陣序列,以前的點(diǎn)陣庫是按內(nèi)碼順序放的,不需要內(nèi)碼索引的,如果只放部分漢字,就需要內(nèi)碼索引了。(前面的漢字“徐”是為了要輸出“徐”的時候找到該字的點(diǎn)陣序列,這個點(diǎn)陣序列是自己寫的,當(dāng)用1602顯示時,因?yàn)樵撔酒瑑?nèi)存在英文的點(diǎn)陣序列,所以就不用寫了)一般內(nèi)碼兩個字節(jié)就行了,多用1個字節(jié)是加了個尾0而已,這樣,漢字內(nèi)碼處直接放漢字字符串就可;
codeGB_16[k].Index[0]
codeGB_16[k]說明有一個結(jié)構(gòu)體typFNT_GB16的數(shù)組叫做codeGB_16
codeGB_16[k]是數(shù)組中第k+1個成員
index是結(jié)構(gòu)體typFNT_GB16的成員,所以可以用codeGB_16[k].Index來進(jìn)行引用
同時index又是個數(shù)組,所以可以index[0] if((codeGB_16[k].Index[0]==c[0])&&(codeGB_16[k].Index[1]==c[1]))
&&是 邏輯與運(yùn)算符
意思是 &&符號的兩邊的值都為真 &&的值才為真,也就是 true && true =true
這句的意思是
codeGB_16[k].Index[0]==c[0] 和 codeGB_16[k].Index[1]==c[1] 同時成立
if下面的語句才執(zhí)行
codeGB_16[]是個結(jié)構(gòu)體數(shù)組,codeGB_16[k].Index[0]是說結(jié)構(gòu)體數(shù)組的第K個結(jié)構(gòu)體的index成員的第0個元素值。
13、12864液晶:
每個顯示點(diǎn)對應(yīng)一位二進(jìn)制數(shù),1 表示亮,0 表示滅。存儲這些點(diǎn)陣信息的RAM稱為顯示數(shù)據(jù)存儲器。要顯示某個圖形或漢字就是將相應(yīng)的點(diǎn)陣信息寫入到相應(yīng)的存儲單元中。
繪圖RAM的地址計(jì)數(shù)器(AC)只會對水平地址(X 軸)自動加一, 當(dāng)水平地址=0FH 時會重新設(shè)為00H 但并不會對垂直地址做進(jìn)位自動加一,故當(dāng)連續(xù)寫入多筆資料時,程序需自行判斷垂直地址是否需重新設(shè)定
14、繪圖RAM(GDRAM)
繪圖顯示RAM提供128×8 個字節(jié)的記憶空間,在更改繪圖RAM時,先連續(xù)寫入水平與垂直的坐標(biāo)值,再寫入兩個字節(jié)的數(shù)據(jù)到繪圖RAM,而地址計(jì)數(shù)器(AC)會對水平地址(X 地址)自動加一,當(dāng)水平地址為0XFH 時會重新設(shè)為00H ;不會對垂直地址做進(jìn)位自動加 1. 。在寫入繪圖 RAM的期間,繪圖顯示必須關(guān)閉,
[cpp]viewplaincopy // 顯示漢字 voiddispString (uchar X, Y,uchar *msg) //X為哪一行,Y 為哪一列。msg 為漢字 { if(X==0) X = 0x80; // 第一行,漢字顯示坐標(biāo) else if(X==1) X = 0x90; // 第二行 else if(X==2) X = 0x88; // 第三行 else X = 0x98; //第四行 Y = X + Y; //Y 為1 往右移一位 write_com(Y); // 寫入坐標(biāo) while (*msg) { write_data(*msg++); //顯示漢字 } } //////////////////////////////// //////////////// /////////////// // 顯示圖象 voiddisppicture(uchar code *adder) { uint i,j; //*******顯示上半屏內(nèi)容設(shè)置 for(i=0;i<32;i++) // 上半屏32個列地址 { write_com(0x80 + i); //SET 垂直地址 VERTICALADD write_com(0x80); //SET 水平地址 HORIZONTAL ADD for(j=0;j<16;j++) { write_data(*adder); adder++; } } //*******顯示下半屏內(nèi)容設(shè)置 for(i=0;i<32;i++) // { write_com(0x80 + i); //SET 垂直地址 VERTICALADD write_com(0x88); //SET 水平地址 HORIZONTAL ADD for(j=0;j<16;j++) { write_data(*adder); adder++; } } }
對于C語言,定義的變量,自動為其分配空間,其地址為該變量的名稱。通過該名稱,可以在內(nèi)存中招到該數(shù)據(jù),經(jīng)過運(yùn)算得到新數(shù)據(jù),而匯編中需要編程者自己定義存儲空間及把數(shù)據(jù)送到累加器等進(jìn)行運(yùn)算,每一步都需要編程者操作。而C語言這些過程由編譯器去完成。
15、一些有用的答疑解惑
①、單片機(jī)C語言,其變量的內(nèi)存開辟是如何進(jìn)行的?難道是編譯器,在編譯過程中智能地加入分配與回收的代碼?關(guān)鍵之處在于我所做的程序,如何保證其沒有內(nèi)存溢出錯誤?如果我進(jìn)行的是遞歸運(yùn)算,這樣的話,內(nèi)存需求是很難自己計(jì)算的。
②、單片機(jī)C語言在變量定義上是否會受到約束?比如浮點(diǎn)型數(shù)據(jù)的乘除運(yùn)算,通過匯編還寫,代碼相當(dāng)復(fù)雜,如果直接C語言來寫,豈不過份簡單?
③、單片機(jī)C語言生成的hex文件中,指令及數(shù)據(jù)的ROM的地址分布是否編譯器自動分配?可否用戶進(jìn)行分配?
回答1:c語言寫的單片機(jī)程序,先由1個程序(好像是c51.exe)編譯,編譯完成后,變量的存儲空間大小已經(jīng)安排好,只是還沒分配具體地址(地址浮動),接下來有另一個程序(好像是a51.exe)進(jìn)行連接,連接以后,具體地址確定。
如果變量過多,編譯會提示數(shù)據(jù)段too large,要保證其沒有內(nèi)存溢出錯誤,主要考慮堆棧是否溢出,要靠經(jīng)驗(yàn)
單片機(jī)c語言一般禁止遞歸,一般都避免用遞歸運(yùn)算,單片機(jī)畢竟不是PC,會影響速度的,要遞歸的話,用DSP芯片更合適,總之,要會挑合適的芯片
回答2:變量的大小(位數(shù))一般和芯片累加器的位數(shù)一樣,比如51常用8位的,因?yàn)樗?位單片機(jī)
單片機(jī)可以定義位變量,但是不可以定義位數(shù)組。用c語言寫只是看著簡單,實(shí)際生成的代碼量是最多的,用于控制的單片機(jī)幾乎不用浮點(diǎn)數(shù)運(yùn)算,不僅慢還麻煩還占地方,如果是DSP芯片,本身有適合的硬件結(jié)構(gòu),會好很多。
回答3:一般是自動分配的,可以c語言和匯編語言混合編程,也可以用Keil C在線匯編,芯片與外部的數(shù)據(jù)交換都是通過端口進(jìn)行的。
-
微控制器
+關(guān)注
關(guān)注
48文章
7552瀏覽量
151426 -
單片機(jī)
+關(guān)注
關(guān)注
6037文章
44558瀏覽量
635355 -
mcu
+關(guān)注
關(guān)注
146文章
17148瀏覽量
351213 -
微處理器
+關(guān)注
關(guān)注
11文章
2263瀏覽量
82457
原文標(biāo)題:MCU最強(qiáng)科普總結(jié)(收藏版)
文章出處:【微信號:汽車半導(dǎo)體情報局,微信公眾號:汽車半導(dǎo)體情報局】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
VR一體機(jī)防艾科普教學(xué)(艾滋病認(rèn)知科普)概述
VR防艾科普教學(xué)艾滋病認(rèn)知科普概述
科普電涌的知識
關(guān)于MCU相關(guān)的知識總結(jié)和積累
介紹的是高性能MCU之人工智能物聯(lián)網(wǎng)應(yīng)用開發(fā)相關(guān)知識
知識科普 | 沙子變“芯”計(jì)
車規(guī)級MCU相關(guān)知識科普
MCU基礎(chǔ)知識科普
pcb高速信號知識科普
網(wǎng)絡(luò)視頻監(jiān)控系統(tǒng)相關(guān)知識科普





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論