 單片機和FreeRTOS上跑機器人ROS
單片機和FreeRTOS上跑機器人ROS
機器人的應用越來越廣泛了,大家熟知的稚暉君直接創業搞機器人,可想而至,接下來的十年,機器人絕對是熱門的行業。
目前市面上很多機器人都是基于一套叫做ROS的系統開發的,今天就給大家分享一個跑在MCU上,基于FreeRTOS的輕量級(micro)ROS。
隨著市場需求不斷的擴大,這種基于MCU的ROS將會越來越普及,對于從事機器人相關工作的讀者有必要了解一下。
關于ROS
ROS:Robot Operating System,,即機器人操作系統。
和普通OS(RTOS、TSOS)不一樣的是,ROS主要是針對機器人,是基于操作系統之上,提供一系列程序庫和工具以幫助軟件開發者創建機器人應用軟件。它提供了硬件抽象、設備驅動、庫函數、可視化、消息傳遞和軟件包管理等諸多功能。ROS遵守BSD開源許可協議。
ROS設計者將ROS表述為“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通訊機制、工具軟件包、機器人高層技能以及機器人生態系統的集合體。
micro-ROS
本文說的micro-ROS,是基于ROS2進行優化的一套輕量級ROS系統,它提供了完全部署的ROS 2生態系統的大多數吸引人的工具和功能,并具有入式和低資源設備的卓越能力,可以運行在MCU硬件平臺。
傳統上,即使機器人包含許多ROS,ROS仍停留在微控制器邊界。它們通常通過串行協議與舊版ROS中的ROS-serial之類的工具集成在一起。
在微控制器中擁有所有ROS2的功能和相同的API會不是很好嗎?這正是micro-ROS提供的-機器人系統嵌入式部分內部的ROS開發生態系統。micro-ROS允許開發人員在硬件級別附近運行ROS 2節點。這使所有硬件外設都可用于該應用程序,從而使其能夠直接與SPI或I2C等低級總線進行交互,以與傳感器和執行器接口。
微型ROS是一組分層的庫,它們可以直接重用ROS 2的庫,也可以使其適應資源受限設備的功能和需求。具體來說,如果我們轉向ROS 2體系結構,則由微型ROS維護的層是ROS客戶端庫(RCL)和ROS中間件接口(RMW)。同樣,RCLCPP是RCL之上的C ++抽象層,即使大多數與RCL直接接口,它也可以被微型ROS應用程序組件使用。該層在RCLC中提供了相對于ROS 2的附加功能,RCLC是用C99編寫的庫,其中專門設計和開發了與RCLCPP提供的功能類似的功能,例如便利功能或執行程序,以適合微控制器。
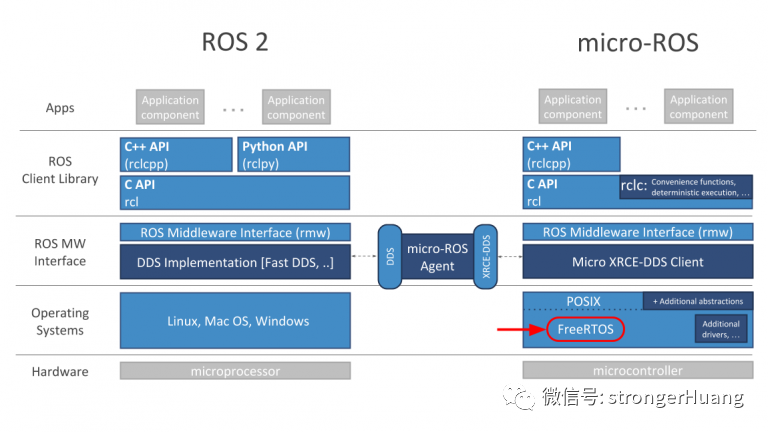
通常,ROS是基于 Linux系統之上的運行的一套系統,而本文這套微型ROS基于FreeROS運行。
這使micro-ROS在硬件和軟件級別上都能與大多數嵌入式平臺兼容。
但是,最終構成micro-ROS體系結構的是RMW實現,該實現基于稱為Micro XRCE-DDS的中間件庫。Micro XRCE-DDS是由對象管理組(OMG)定義和維護的DDS-XRCE(用于極端資源受限環境的DDS)協議的C / C ++實現。
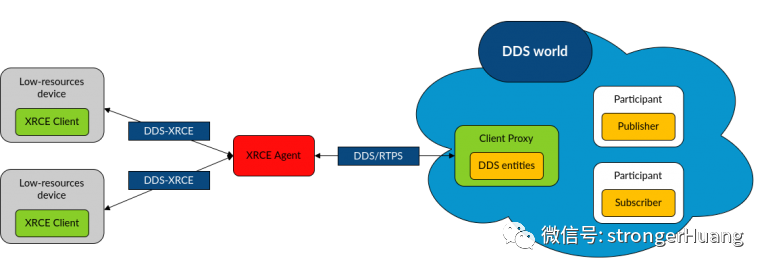
顧名思義,DDS-XRCE是一種有線協議,允許引入以數據為中心的發布者-訂閱者DDS模型進入嵌入式世界。DDS-XRCE依賴于客戶端-服務器體系結構,其中客戶端是用C99編寫的輕量級實體,可在低資源設備中運行,而代理(C ++ 11應用程序)則充當客戶端與DDS世界之間的橋梁。DDS-XRCE協議負責在這兩個實體之間傳遞請求和消息。相應地,該代理能夠通過標準DDS有線協議與DDS全局數據空間進行通信。在DDS世界中,代理通過與其他DDS參與者進行通信來代表客戶。該通信由客戶端代理,能夠通過所有標準DDS實體與DDS進行交互的模擬DDS應用程序進行協調。代理將客戶端的狀態保存在其內存中,這樣,即使代理斷開連接,代理也可以存活。代理與客戶端之間的通信遵循請求-響應模式,即雙向并基于操作和響應。
為什么選擇FreeRTOS?
由于它們的輕巧性,XRCE-DDS客戶端庫和microROS都易于在實時操作系統之上運行,這使它們能夠滿足其典型目標應用程序所提出的對時間要求嚴格的要求,其中涉及的任務包括要求時限或確定性響應。
具體來說,FreeRTOS已成為micro-ROS項目支持的首批RTOS之一,因此已集成到其軟件堆棧中。這允許重用FreeRTOS社區和合作伙伴提供的所有工具和實現。由于微型ROS軟件堆棧是模塊化的,因此期望并期望交換軟件實體。
FreeRTOS是開發micro ROS和Micro XRCE-DDS應用程序的理想選擇。首先,它為許多不同的體系結構和開發工具提供了一個獨立的解決方案,它以非常清晰和透明的方式編寫,并且擁有非常龐大的用戶群,從而確保了大量FreeRTOS用戶將能夠將其應用程序與微型ROS應用程序集成。而且,它是眾所周知的高度可靠的RTOS。至關重要的是,FreeRTOS具有最小的ROM,RAM和處理開銷。通常,RTOS內核二進制映像的大小在6K到12K字節之間。由于要與RTOS進行資源競爭,因此,當要最小化MCU上的微型ROS應用程序的內存占用量時,這些內存是理想的選擇。
在下文中,我們將討論FreeRTOS提供的幾種功能,以及微型ROS如何利用它們來獲利,以優化其堆棧中組成的不同庫的所需功能。
任務和計劃程序
FreeRTOS提供了一組最少的任務實體,這些實體與調度程序的使用一起,為在應用程序中實現確定性提供了必要的工具。微型ROS客戶端庫(RCL,RCLC和RCLCPP)訪問RTOS的資源,以控制調度和電源管理機制,從而為開發人員提供了優化應用程序的可能性。
FreeRTOS提供的任務有兩種:標準任務和空閑任務。前者由用戶創建,可以視為RTOS上的應用程序。至關重要的是,將微型ROS應用程序集成到RTOS中作為具有給定優先級的此類任務之一。空閑任務另一方面,優先級較低的任務只有在沒有其他任務在運行時才進入運行模式。由于microROS主要針對低功耗和IoT設備,因此這些空閑任務和相關的空閑掛鉤非常適合在MCU中啟用深度睡眠狀態。由于將無狀態XRCE-DDS客戶端實現為micro-ROS中間件,因此這些深度睡眠狀態可能是內存易失的,也就是說,由于面向連接的中間件有線協議,可以使用沒有RAM持久性的深度睡眠模式。
使用FreeRTOS調度程序,micro-ROS能夠管理其主要任務以及負責傳輸層的任務的優先級。通常,負責網絡堆棧或串行接口的任務必須優先于micro-ROS應用程序。
內存管理
FreeRTOS提供的最令人期望的功能(對于微型ROS開發人員和用戶而言非常有趣)是堆棧管理和靜態堆棧創建能力。在處理micro-ROS的任務創建時,通常,堆棧分配是關鍵的設計決策。FreeRTOS允許進行細粒度的堆棧大小管理,這又使程序員可以知道在程序執行期間正在使用多少堆棧內存,或例如確定堆棧內存分配是否存在于靜態或動態內存中,從而確定幫助正確使用MCU的內存,這是嵌入式系統中的寶貴資源。至關重要的是,可以為微ROS提供繁重的堆棧使用方任務,并為其分配靜態分配的堆棧,從而防止將來出現堆和其他任務初始化問題。
在這方面,值得一提的是,這些內存管理工具為基準化微型ROS和XRCE-DDS的內存占用量提供了理想的框架。具體而言,已進行了徹底的堆棧消耗分析,以評估XRCE-DDS客戶端內存消耗。堆棧是程序員在運行應用程序之前未知的內存塊。為了對其進行度量,可以使用FreeRTOS uxTaskGetStackHighWaterMark()函數,該函數返回在執行過程中XRCE-DDS任務堆棧達到最大值時未使用的堆棧量。通過將此值減去總堆棧,可以得到XRCE-DDS應用程序使用的堆棧峰值。用這種方法獲得的結果匯總在此處發布的報告中。
我們還注意到,由于FreeRTOS中使用了可插拔的動態內存管理方法,因此micro-ROS能夠完成所需的用于管理內存的接口。通過這種方式,已經使用heap_4作為參考實現了諸如calloc()或realloc()之類的函數。這些功能在饋入micro-ROS內存管理API之前已被包裝,以便分析動態內存消耗。
與靜態內存情況類似,FreeRTOS的可交換動態內存管理方法使在嵌入式系統中執行動態內存配置文件分析特別容易。的確,盡管在其他RTOS中,動態(取消)分配功能隱藏在RTOS或標準庫的深處,但在FreeRTOS中,它們暴露給用戶并易于定制,因此簡化了處理和控制動態內存使用的過程。
傳輸
與客戶端支持庫訪問FreeRTOS的特定原語和功能(例如調度機制)的方式相同,中間件實現Micro XRCE-DDS要求訪問RTOS的傳輸和時間資源以使其正常運行。關于IP傳輸,在FreeRTOS的特定情況下,Micro XRCE-DDS使用在此RTOS上實現lwIP的附件。lwIP(輕型IP)是為嵌入式系統設計的,廣泛使用的開源TCP / IP堆棧,旨在減少資源使用,同時仍提供完整的TCP堆棧。這使得lwIP的使用特別適用于以micro-ROS為目標的嵌入式系統和資源受限的環境。
除了TCP / IP堆棧,lwIP還有其他幾個重要部分,例如網絡接口,操作系統仿真層,緩沖區和內存管理部分。操作系統仿真層和網絡接口允許將網絡堆棧移植到操作系統中,因為它提供了lwIP代碼和操作系統內核之間的通用接口。
FreeRTOS與lwIP 的集成是從頭開始設計的,具有標準且熟悉的接口(伯克利套接字),并且具有線程安全性,旨在使其盡可能易于使用。而且,它可以將緩沖區管理保留在可移植層中。
請注意,XRCE-DDS客戶端還支持FreeRTOS + TCP網絡堆棧。FreeRTOS + TCP是用于TCP / IP堆棧協議支持的官方FreeRTOS擴展庫。
還努力使FreeRTOS + TCP與micro-ROS兼容。這包括對TCP和UDP連接的支持,它們依靠FreeRTOS + TCP API來實現micro XRCE-DDS Client API所要求的抽象層,以便能夠使用這些協議與代理進行通信。
此外,還存在使用FreeRTOS的時間測量功能的可能性,從而使XRCE-DDS庫能夠執行基于時間的任務,從而使用戶看不到實現。
Posix擴展
允許將FreeRTOS無縫和盈利地集成到micro-ROS中的另一個顯著原因是POSIX擴展的可用性。便攜式操作系統接口(POSIX)是IEEE計算機協會為維護操作系統之間的兼容性而指定的一系列標準。FreeRTOS Labs提供的FreeRTOS + POSIX層實現了POSIX API的子集。
確實,盡管micro-ROS中間件具有較低的POSIX依賴關系(只是clock_gettime()函數),但整個micro-ROS堆棧具有與功能和類型定義相關的更高依賴關系。另外,由于微型ROS項目的基本原理之一是移植或重用Linux(主要是POSIX兼容操作系統)中本機編碼的ROS 2的代碼,因此使用了某種程度上可與Linux兼容的RTOS。POSIX顯然是有益的,因為代碼的移植工作量很小。
為此,使用了sleep()和usleep()之類的函數。micro-ROS的POSIX類型定義依賴項依賴于FreeRTOS內核中未定義的某些結構,例如struct timeval或struct timespec。還需要諸如type.h,signal.h或unistd.h之類的文件來定義一些標準的類型定義和結構。
對于errno.h,盡管在FreeRTOS + POSIX層中未實現,但出于編譯目的,micro-ROS必須包括一些不可用的定義。
通過使用FreeRTOS + FAT庫,應在micro-ROS堆棧中重構這些定義,以使FreeRTOS + POSIX具有完全的兼容性。這樣,可以完全支持依賴文件系統支持的高級micro-ROS功能,例如日志記錄機制。
更多相關教程
如何在FreeRTOS上使用Olimex STM32-E407評估板創建和運行第一個微型ROS應用程序:

-
單片機
+關注
關注
6037文章
44558瀏覽量
635355 -
嵌入式
+關注
關注
5082文章
19126瀏覽量
305243 -
機器人
+關注
關注
211文章
28418瀏覽量
207103 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62181
原文標題:單片機和FreeRTOS上跑機器人ROS
文章出處:【微信號:嵌入式開發愛好者,微信公眾號:嵌入式開發愛好者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
單片機教學機器人-鷗鵬科技
【ROS RIKIBOT基礎--使用系列 第一章節】ROS機器人硬件系統 精選資料分享
最實用的STM32和ROS機器人的串口通信方案
【搶鮮體驗】--- Tran***ot ROS教育機器人
【搶鮮體驗】- Tran***ot ROS教育機器人
如何搭建實體機器人ros底盤
基于FreeRTOS的micro(微型)ROS

基于單片機的營救機器人的設計與制作

ROS/51單片機/機器人控制器實驗報告冊





 工商網監
工商網監
評論