 機器人的ROS模型建立
機器人的ROS模型建立
這個系列主要介紹機器人ROS模型的建立方法,ROS系統帶來的好處之一就是:
我們無需自己建立復雜的數學模型來描述自己的機器人幾何尺寸、運動學和動力學等,只需要用它提供的模型描述方法即可實現快速建模。
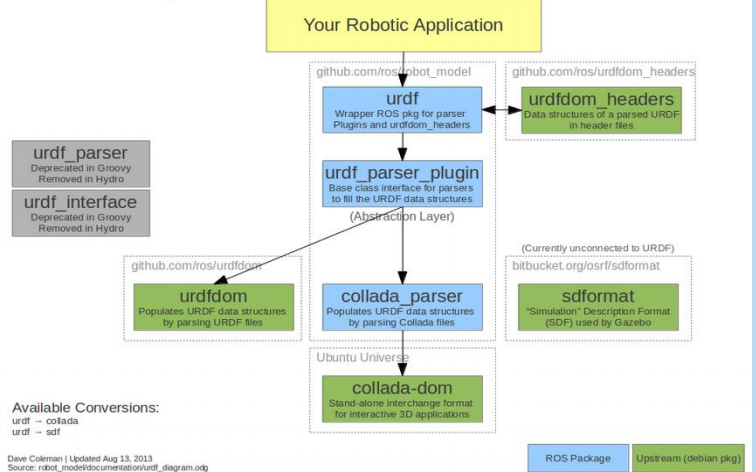
ROS系統的模型描述方法主要有兩種格式: URDF 和 XACRO。
URDF:用于描述一些簡單的機器人模型,參考官網:URDF官方介紹(初學者一定要精讀這些文檔)。
XACRO:應用更普遍的機器人模型描述文件,參考官網:xacro,它有如下幾個特點:
1.語法簡練。采用編程話的腳本語言格式,可以定義變量、常量、引入數學表達式等,極易上手。
2.方便復用。它可以進行一系列的宏定義,并且可以包含其他.xacro文件。
下面,開始用xacro文件建立Rob的機器人模型。
1.第一部分是文件的頭和一些宏定義
robot name我們可以自己隨便定義,然后分別給出了幾組顏色和常數的定義,最后給出了關節傳動部分的宏定義。
< ?xml version="1.0"? >
< robot name="rob_robot" xmlns:xacro="http://ros.org/wiki/xacro" >
< !-- Include materials -- >
< material name="Black" >
< color rgba="0.0 0.0 0.0 1.0"/ >
< /material >
< material name="White" >
< color rgba="1.0 1.0 1.0 1.0"/ >
< /material >
常量的定義方法如下,在引用這里定義的常量的時候,用**{XX},例如在如果在下面的代碼中想引用M_PI,只需要用:**{M_PI} 即可。
< !-- Constants -- >
< property name="deg_to_rad" value="0.01745329251994329577"/ >
< property name="M_PI" value="3.14159"/ >
關節的傳動參數宏定義方法如下,xacro:macro name 定義了本宏的名稱。
這個名稱由用戶定義,后續引用該宏的時候就是根據名字來的。
具體如何操作參考下文介紹或git上的源代碼。
注意,這里宏定義內部的一些具體數值僅為說明而存在,具體的機器人關節應該是不一樣的。
< !-- transmission block macro definition -- >
< xacro:macro name="transmission_block" params="joint_name" >
< transmission name="tran1" >
< type >transmission_interface/SimpleTransmission< /type >
< joint name="${joint_name}" >
< hardwareInterface >PositionJointInterface< /hardwareInterface >
< /joint >
< actuator name="motor1" >
< hardwareInterface >PositionJointInterface< /hardwareInterface >
< mechanicalReduction >1< /mechanicalReduction >
< /actuator >
< /transmission >
< /xacro:macro >
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28419瀏覽量
207110 -
模型
+關注
關注
1文章
3244瀏覽量
48842 -
ROS
+關注
關注
1文章
278瀏覽量
17010
發布評論請先 登錄
相關推薦
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優
發表于 07-05 08:52
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
本帖最后由 Tronlong創龍科技 于 2024-7-19 17:18 編輯
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它
發表于 07-09 11:38
【ROS RIKIBOT基礎--使用系列 第一章節】ROS機器人硬件系統 精選資料分享
【ROS RIKIBOT基礎–使用系列】ROS機器人硬件介紹1.RIKIBOT機器人硬件介紹1.1硬件框架ROS
發表于 07-30 06:59
最實用的STM32和ROS機器人的串口通信方案
全網最實用的STM32和ROS機器人的串口通信方案小白學移動機器人同名公眾號:小白學移動機器人創作聲明:內容包含虛構創作內容中的情節存在虛構加工,僅供參考全網最實用的STM32和
發表于 08-20 06:33
【搶鮮體驗】--- Tran***ot ROS教育機器人
本帖最后由 mu0543 于 2021-11-25 20:23 編輯
如果你熱衷于編程探索和DIY創作,恰好又在尋找一款可以讓你自由發揮,二次開發的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機器人將會非常
發表于 11-25 20:13
【搶鮮體驗】- Tran***ot ROS教育機器人
Tran***ot ROS教育機器人如果你熱衷于編程探索和DIY創作,恰好又在尋找一款可以讓你自由發揮,二次開發的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育
發表于 11-25 20:33
如何搭建實體機器人ros底盤
目錄介紹一、底盤主控板二、嵌入式開發板1. 與上位機pc的關系2. 與STM32主控板的關系介紹自下而上的分析實體機器人(差分輪速機器人)搭建中的關鍵過程。一、底盤主控板本部分搭建實體機器人r
發表于 01-20 07:36
怎樣將微型ROS移植到機器人的RA MCU中呢
瑞薩電子公司與專門從事中間件解決方案的公司 eProsima 合作,將微型 ROS 移植到 RA 微控制器 (MCU) 中,以便更輕松地開發用于物聯網 (IoT) 和工業系統的專業機器人應用程序
發表于 02-11 06:19
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞
發表于 11-30 16:01
ROS教程之如何構建ROS機器人模型URDF學習資料免費下載
URDF ( Unified Robot Description Format )直接的翻譯就是“統一機器人描述格式”,是一種特殊的xm|文件格式,作為機器人的一種通用使用的描述文件。 ROS中
發表于 10-15 08:00
?32次下載





 工商網監
工商網監
評論