 ROS模型建立常見錯誤
ROS模型建立常見錯誤
將 XACRO文件轉換成 URDF 文件 并檢查
轉換的方法很簡單,ROS封裝了實現方法,我們只需進入xacro 所在的文件夾,然后鍵入如下命令即可:
rosrun xacro xacro.py rob.xacro > rob.urdf
為了檢驗我們的模型的準確性,我們進行簡單的檢查,在同一個目錄下輸入:
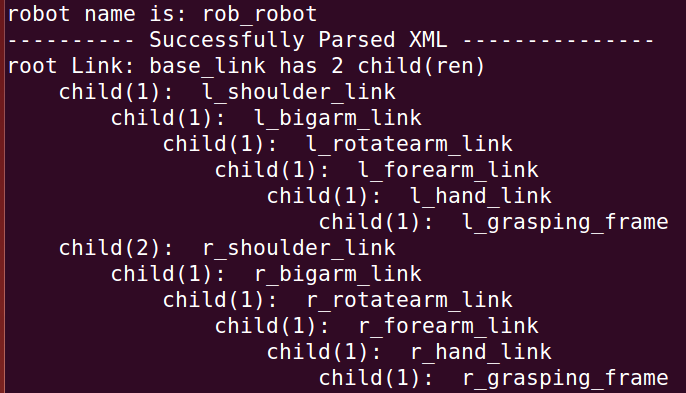
check_urdf rob.urdf
即可得到如下圖顯示,可以看到雙臂的關節鏈接情況。
為了更直觀的觀看關節鏈接情況,我們在同一個目錄下輸入下面這行命令,就會得到 rob_robot.gv 和 file rob_robot.pdf 兩個文件。
urdf_to_graphiz rob.urdf
5.在RViz中觀看模型
編寫 launch 文件,取名:description.launch ,內容如下:
< launch >
< arg name="model" / >
< !-- Parsing xacro and setting robot_description parameter -- >
< param name="robot_description" command="$(find xacro)/xacro.py $(find rob_description)/urdf/rob.xacro"/ >
< !-- Setting gui parameter to true for display joint slider -- >
< param name="use_gui" value="true"/ >
< !-- Starting Joint state publisher node which will publish the joint values -- >
< node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" / >
< !-- Starting robot state publish which will publish tf -- >
< node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" / >
< !-- Launch visualization in rviz -- >
< node name="rviz" pkg="rviz" type="rviz" args="-d $(find rob_description)/urdf/urdf.rviz" required="true" / >
< /launch >
輸入命令:
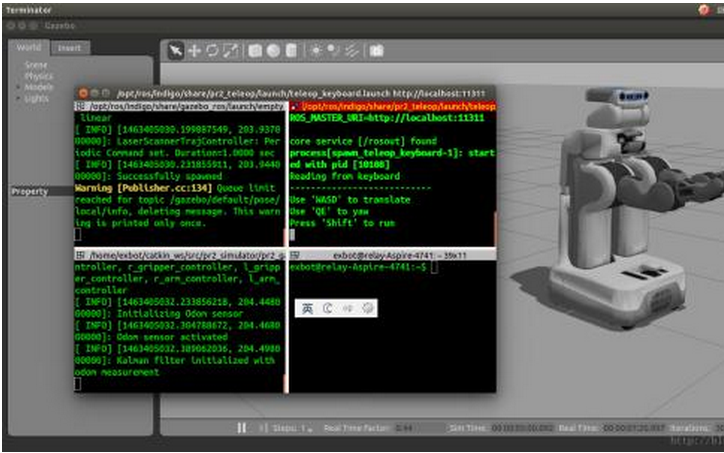
roslaunch rob_description description.launch
轉動每個關節,檢查無誤后,模型建立完成,下一篇經介紹如何使用 MoveIt 控制 Rob 機器人。
Tips 建模常見錯誤
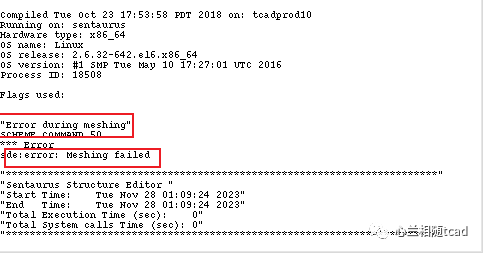
問題1:如果在查看模型時發現錯誤提示:No transform from [xxxx] to [base_link]
解決辦法:出現這個錯誤首先要懷疑是你的xacro描述文件編寫的格式出現了錯誤。
如頭部多了空格、中間關鍵字拼寫錯誤等,建議耐下心來逐行逐句檢查語法。
問題2:源碼中和xacro文件同一目錄的 urdf.rviz 文件是什么作用?
答:所有的 .rviz 文件都是 Rviz 的配置文件,這里我們在launch 文件中制定了他的配置文件。
如果不指定Rviz 啟動時會讀取默認的配置文件,用戶可以根據需求啟動Rviz后在左上角工具欄上保存自己滿意的配置文件。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28578瀏覽量
207795 -
模型
+關注
關注
1文章
3280瀏覽量
48992 -
ROS
+關注
關注
1文章
279瀏覽量
17042
發布評論請先 登錄
相關推薦
ROS與RPLIDAR結合使用說明及問題匯總
`隨著科學技術的不斷發展,服務機器人等諸多智能產品逐漸進入人們的視線,不管是家庭中常見的掃地機器人、還是商場里的導購機器人,要讓他們智能化的完成任務,智能移動與導航是不可或缺的關鍵技術。 ROS作為
發表于 09-07 16:27
labview建立veristand模型
are specified as parameters.指定為必需輸入的終端是模型導入,建議和可選輸入指定為參數。這是NI描述的labview在建立veristand模型時指定模型輸
發表于 07-14 11:02
如何建立芯片模型數據?
最近抄板一電路,想仿真試試結果。結果第一步就卡住了,因為電路板上用了HV3-2405E這種芯片。在網上找不到這個芯片的庫,個人建立元件模型,也卡在了模型數據上!向大神們求助,如何建立這
發表于 03-06 10:15
ROS機器人軟件平臺有哪些常用命令?ROS的常見命令詳細資料免費下載
本文檔的主要內容詳細介紹的是ROS有哪些常用命令?ROS的常見命令詳細資料免費下載。
發表于 09-13 08:00
?20次下載
基于深度學習模型的點云目標檢測及ROS實現
近年來,隨著深度學習在圖像視覺領域的發展,一類基于單純的深度學習模型的點云目標檢測方法被提出和應用,本文將詳細介紹其中一種模型——SqueezeSeg,并且使用ROS實現該模型的實時目
ROS部署PaddlePaddle的CV模型
paddle_inference_ros_demo功能包是基于paddle_inference_ros開發的,幫助開發者快速體驗paddle_inference在ROS環境下的推理部署效果的功能包。可以直接進入該項目鏈接進行查看

ros1和ros2的通信模型
ros1: talker 注冊 listener 注冊 ROS Master 進行信息匹配 listener 發送鏈接請求 talker 確認請求 建立連接 talker 給 listener 發

vlookup常見的12種錯誤
中,我將介紹VLOOKUP函數的常見錯誤,并提供詳盡、詳實、細致的解決方法。 錯誤#N/A:這是最常見的VLOOKUP錯誤之一,它表示無法找





 工商網監
工商網監
評論