 電磁循跡中什么是歸一化
電磁循跡中什么是歸一化
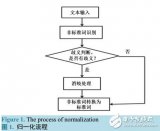
什么是歸一化
歸一化就是將所有數據都變成0-1之間的數,將數據映射到0~1范圍之內處理,使數據觀察更便捷快速。
在電磁車行駛過程中,由于需要通過分析各個電感采集值的情況來判定前方為何種路段。
所以更要求這些采集值有跡可循,歸一化便是一種很好的方法,先將所有采集到的值縮小到0-1范圍內,再適當放大(常見的放大倍數為100)。
這樣既能更容易的由電磁值分析出路況,又不會因為數據過小而失真。
歸一化的代碼實現
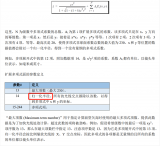
歸一化的公式如下:(x-Min)/(Max-Min)。
其中,x為實時檢測到的變量,Min與Max為標定的電感采集最小與最大值。
具體代碼如下:
AD_M_Left[0] =(uint16)(99*(LeftAverage[0]-M_Left_min)/(M_Left_max[0]-M_Left_min)+1);
PID控制
在介紹PID算法前,我們可以試想一下,如果沒有某些特殊的算法,那么我們會如何控制舵機打角和電機轉速?
就舵機而言,其結論可能是,設定一個特定的值,當左右電感的電磁值之差達到這個設定的值時。
便控制舵機向左或向右打一定的角度(或者多設值,分不同情況多段打角)。
實際上這也是我在剛接觸智能車時用的算法,這種算法雖然能夠讓賽車在賽道上行駛,但打角不夠順滑,反應也不夠靈敏。
這時我們便需要將這個差值代入某個算法,令其與舵機打角關聯起來,這樣便可以得到一個較為連貫與精確的舵機輸出值。
有利于賽車更完美的運行,而這種將差值與最后輸出值關聯起來的算法便是我們常說的PID控制算法。
什么是PID控制
比例(P)積分(I)微分(D)控制(PID控制),是應用最為廣泛的一種自動控制器。
它具有原理簡單,易于實現,適用面廣,控制參數相互獨立,參數的選定比較簡單等優點。
PID控制分為很多種,而智能車中常用增量式和位置式兩種算法對車身進行控制,以保證賽車在賽道上完美運行。
-
電磁
+關注
關注
15文章
1137瀏覽量
51885 -
檢測
+關注
關注
5文章
4507瀏覽量
91607 -
控制算法
+關注
關注
4文章
166瀏覽量
21748
發布評論請先 登錄
相關推薦
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法

半電波暗室歸一化場地衰減的預測pdf
談談 :【歸一化】
電磁巡線歸一化算法看不懂,各位大佬,求助
【原創分享】歸一化在電機控制中究竟有什么用?
傣語語音合成中的文本歸一化方法
【代碼收藏夾】C語言的歸一化算法

Zemax不同面型的歸一化半徑如何設置
智能車中電磁歸一化該怎么處理
20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車





 工商網監
工商網監
評論