 在樹莓派Pico上使用TM1637 4位數碼管模塊的方法
在樹莓派Pico上使用TM1637 4位數碼管模塊的方法
本教程重點介紹在樹莓派 Pico 上使用 TM1637 4 位數碼管模塊的方法。
所需組件
– 樹莓派 Pico 或 Pico W
– TM1637 4 位數碼管模塊
– 面包板和跳線
– microUSB 數據線
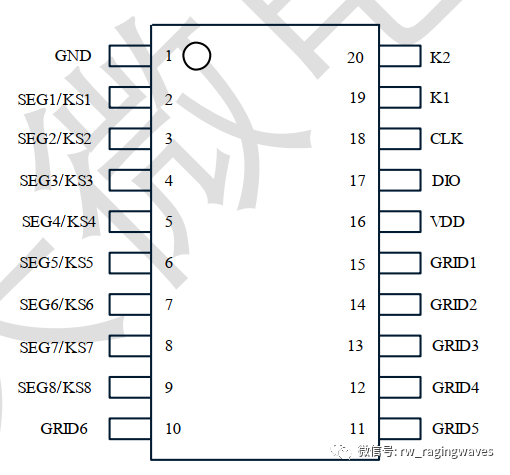
TM1637 是一種帶鍵盤掃描接口的 LED(發光二極管顯示器)驅動控制專用電路,內部集成有 MCU 數字接口、數據鎖存器、LED 高壓驅動、鍵盤掃描等電路。TM1637 驅動的數碼管模塊因其控制引腳數量少而廣受歡迎。在這 4 個引腳中,其中兩個是電源引腳,其余兩個引腳控制模塊上的顯示值。
引腳名稱功能

CLK 時鐘引腳有助于保持時鐘脈沖與模塊和微控制器的同步。
DIO 數據引腳有助于從微控制器發送和接收數據。
GND 接地 (GND) 用于與外部設備建立公共接地。
VCC 電源 (VCC) 輸入引腳,用于為模塊供電。接受 3.3-5V VCC。
樹莓派 Pico I2C 引腳
RP2040 芯片有兩個 I2C 控制器。兩個 I2C 控制器都可以通過樹莓派 Pico 的 GPIO 引腳訪問。下表顯示了 GPIO 引腳與兩個 I2C 控制器的連接。控制器的每個連接都可以通過多個GPIO引腳進行配置,如圖所示。但在使用 I2C 控制器之前,你應該在軟件中配置要與特定 I2C 控制器一起使用的 GPIO 引腳。
I2C 控制器 GPIO 引腳
I2C0 – SDA GP0/GP4/GP8/GP12/GP16/GP20
I2C0 – SCL GP1/GP5/GP9/GP13/GP17/GP21
I2C1 – SDA GP2/GP6/GP10/GP14/GP18/GP26
I2C1 – SCL GP3/GP7/GP11/GP15/GP19/GP27
兩個設備之間的連接相當簡單。我們用 GP26 連接 CLK,用 GP27 連接 DIO。你也可以使用其他 SDA/SCL 引腳組合,如上表所示。
請遵循下圖: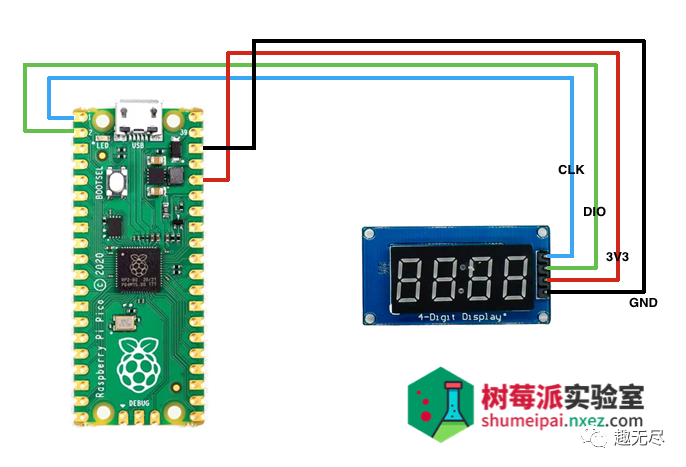
安裝 TMP1637 庫
要使用 TM1637 數碼管模塊對樹莓派 Pico 進行編程,我們需要來自 GitHub 的 TM1637 庫。
復制此庫并將其保存在名為 tm1637.py 的樹莓派 Pico 中。在 Thonny 中打開一個新文件。復制下面給出的庫或從此鏈接獲取。將其保存到樹莓派 Pico,名稱 tm1637.py,放在根目錄或 lib 文件夾下。
from micropython import const from machine import Pin from time import sleep_us, sleep_ms TM1637_CMD1 = const(64) # 0x40 data command TM1637_CMD2 = const(192) # 0xC0 address command TM1637_CMD3 = const(128) # 0x80 display control command TM1637_DSP_ON = const(8) # 0x08 display on TM1637_DELAY = const(10) # 10us delay between clk/dio pulses TM1637_MSB = const(128) # msb is the decimal point or the colon depending on your display # 0-9, a-z, blank, dash, star _SEGMENTS = bytearray(b'x3Fx06x5Bx4Fx66x6Dx7Dx07x7Fx6Fx77x7Cx39x5Ex79x71x3Dx76x06x1Ex76x38x55x54x3Fx73x67x50x6Dx78x3Ex1Cx2Ax76x6Ex5Bx00x40x63') class TM1637(object): """Library for quad 7-segment LED modules based on the TM1637 LED driver.""" def __init__(self, clk, dio, brightness=7): self.clk = clk self.dio = dio if not 0 <= brightness <= 7: raise ValueError("Brightness out of range") self._brightness = brightness self.clk.init(Pin.OUT, value=0) self.dio.init(Pin.OUT, value=0) sleep_us(TM1637_DELAY) self._write_data_cmd() self._write_dsp_ctrl() def _start(self): self.dio(0) sleep_us(TM1637_DELAY) self.clk(0) sleep_us(TM1637_DELAY) def _stop(self): self.dio(0) sleep_us(TM1637_DELAY) self.clk(1) sleep_us(TM1637_DELAY) self.dio(1) def _write_data_cmd(self): # automatic address increment, normal mode self._start() self._write_byte(TM1637_CMD1) self._stop() def _write_dsp_ctrl(self): # display on, set brightness self._start() self._write_byte(TM1637_CMD3 | TM1637_DSP_ON | self._brightness) self._stop() def _write_byte(self, b): for i in range(8): self.dio((b >> i) & 1) sleep_us(TM1637_DELAY) self.clk(1) sleep_us(TM1637_DELAY) self.clk(0) sleep_us(TM1637_DELAY) self.clk(0) sleep_us(TM1637_DELAY) self.clk(1) sleep_us(TM1637_DELAY) self.clk(0) sleep_us(TM1637_DELAY) def brightness(self, val=None): """Set the display brightness 0-7.""" # brightness 0 = 1/16th pulse width # brightness 7 = 14/16th pulse width if val is None: return self._brightness if not 0 <= val <= 7: raise ValueError("Brightness out of range") self._brightness = val self._write_data_cmd() self._write_dsp_ctrl() def write(self, segments, pos=0): """Display up to 6 segments moving right from a given position. The MSB in the 2nd segment controls the colon between the 2nd and 3rd segments.""" if not 0 <= pos <= 5: raise ValueError("Position out of range") self._write_data_cmd() self._start() self._write_byte(TM1637_CMD2 | pos) for seg in segments: self._write_byte(seg) self._stop() self._write_dsp_ctrl() def encode_digit(self, digit): """Convert a character 0-9, a-f to a segment.""" return _SEGMENTS[digit & 0x0f] def encode_string(self, string): """Convert an up to 4 character length string containing 0-9, a-z, space, dash, star to an array of segments, matching the length of the source string.""" segments = bytearray(len(string)) for i in range(len(string)): segments[i] = self.encode_char(string[i]) return segments def encode_char(self, char): """Convert a character 0-9, a-z, space, dash or star to a segment.""" o = ord(char) if o == 32: return _SEGMENTS[36] # space if o == 42: return _SEGMENTS[38] # star/degrees if o == 45: return _SEGMENTS[37] # dash if o >= 65 and o <= 90: return _SEGMENTS[o-55] # uppercase A-Z if o >= 97 and o <= 122: return _SEGMENTS[o-87] # lowercase a-z if o >= 48 and o <= 57: return _SEGMENTS[o-48] # 0-9 raise ValueError("Character out of range: {:d} '{:s}'".format(o, chr(o))) def hex(self, val): """Display a hex value 0x0000 through 0xffff, right aligned.""" string = '{:04x}'.format(val & 0xffff) self.write(self.encode_string(string)) def number(self, num): """Display a numeric value -999 through 9999, right aligned.""" # limit to range -999 to 9999 num = max(-999, min(num, 9999)) string = '{0: >4d}'.format(num) self.write(self.encode_string(string)) def numbers(self, num1, num2, colon=True): """Display two numeric values -9 through 99, with leading zeros and separated by a colon.""" num1 = max(-9, min(num1, 99)) num2 = max(-9, min(num2, 99)) segments = self.encode_string('{0:0>2d}{1:0>2d}'.format(num1, num2)) if colon: segments[1] |= 0x80 # colon on self.write(segments) def temperature(self, num): if num < -9: self.show('lo') # low elif num > 99: self.show('hi') # high else: string = '{0: >2d}'.format(num) self.write(self.encode_string(string)) self.write([_SEGMENTS[38], _SEGMENTS[12]], 2) # degrees C def show(self, string, colon=False): segments = self.encode_string(string) if len(segments) > 1 and colon: segments[1] |= 128 self.write(segments[:4]) def scroll(self, string, delay=250): segments = string if isinstance(string, list) else self.encode_string(string) data = [0] * 8 data[4:0] = list(segments) for i in range(len(segments) + 5): self.write(data[0+i:4+i]) sleep_ms(delay) class TM1637Decimal(TM1637): """Library for quad 7-segment LED modules based on the TM1637 LED driver. This class is meant to be used with decimal display modules (modules that have a decimal point after each 7-segment LED). """ def encode_string(self, string): """Convert a string to LED segments. Convert an up to 4 character length string containing 0-9, a-z, space, dash, star and '.' to an array of segments, matching the length of the source string.""" segments = bytearray(len(string.replace('.',''))) j = 0 for i in range(len(string)): if string[i] == '.' and j > 0: segments[j-1] |= TM1637_MSB continue segments[j] = self.encode_char(string[i]) j += 1 return segments
樹莓派 Pico MicroPython:TM1637 代碼
樹莓派 Pico W 需要預加載 MicroPython UF2 文件才能在 MicroPython 中對其進行編程。你可以閱讀我們的樹莓派 Pico 入門指南,其中我們展示了在 MicroPython 中開始編程 RP2040 所需的所有步驟。
如上圖所示完成所有連接后,使用 USB 數據線將 Pico 連接到你的計算機。打開 IDE,將以下代碼粘貼到新項目中。
import tm1637
from machine import Pin
import time
tm = tm1637.TM1637(clk=Pin(0), dio=Pin(1))
#set brightness(0-7)
tm.brightness(5)
# display "10:24"
tm.numbers(10, 24, colon=True)
time.sleep(2)
# Word
tm.show("AbCd", colon=False)
time.sleep(2)
# display "COOL"
tm.write([0b00111001, 0b00111111, 0b00111111, 0b00111000])
time.sleep(2)
# Clear all
tm.show(" ")
time.sleep(2)
# display "bEEF"
tm.hex(0xbeef)
time.sleep(2)
# display "-123"
tm.number(-123)
time.sleep(2)
# show temperature '24*C'
tm.temperature(24)
time.sleep(2)
#scroll display contents
tm.scroll('RPI-ICU', delay=250)
通過單擊“運行”圖標或按 F5 鍵來運行代碼。將腳本保存到你的樹莓派 Pico中,作為 main.py 或任何其他文件擴展名為 “.py” 的名稱。
成功上傳代碼后,你必須看到 TM1637 數碼管模塊顯示更改的字符,每次更新之間有 2 秒的延遲。
TM1637 MicroPython 代碼說明
首先,我們導入必要的模塊。TM1637 模塊用于與 7 段顯示器通信,Pin 模塊用于將 Pico W 引腳設置為輸出引腳,Time 模塊用于設置代碼執行之間的延遲。
import tm1637 from machine import Pin import time
然后,我們定義一個名為 tm 的實例,并啟動 Raspberry Pi Pico 的引腳 0 和 1,分別與引腳 CLK 和 DIO 連接。
tm = tm1637.TM1637(clk=Pin(0), dio=Pin(1))
tm.brightness 可以設置為介于 1 到 7 之間的值。將其設置為“1”會將 TM1637 亮度設置為最低,“7”會亮起所有 LED。
tm.brightness(5)
接下來的行在冒號的兩側顯示 2 個獨立的數字,前導為零。如果不希望冒號顯示在數字之間,則可以將參數冒號設置為 False。
tm.numbers(10, 24, colon=True) time.sleep(2)
寫入函數可用于點亮 LED 的每個部分。它的參數是 8 位二進制數,其中每個位對應于 7 段顯示器的一個段。
tm.write([0b00111001, 0b00111111, 0b00111111, 0b00111000])
為了更好地理解上面的代碼,讓我們看到一個 7 段顯示,其中標記了段。
__2__ | | | 0 -> 011 1111 -> 0x3f 1 | | 3 | 1 -> 010 0001 -> 0x21 |__7__| | 2 -> 111 0110 -> 0x76 | | | 4 -> ... 6 | | 4 | ... |__5__| | 9 -> ... -> 0x5f
在函數 tm.write 中,第一個參數是 0b00111001,它將在 TM1637 模塊上顯示單詞“cool”的第一個字母(即字母 c)。參數中最低有效位表示段“a”,最高有效位表示段“DP”。因此,0b00111001 將點亮 7 段顯示中的段 a、d、e 和 f。同樣,參數 0b00111111、0b001111111 和 0b00111000 將分別顯示字母“o”、“o”和“l”。
接下來,我們使用 tm.show 函數顯示字符串 ‘heya’,使用 tm.hex 顯示十六進制值,使用 tm.number 顯示負數。函數 tm.number 可以顯示數字 -999 到 9999,并且數字將右對齊。
tm.show('heya', colon=False)
tm.hex(0xbeef)
tm.number(-123)
如果要顯示的內容不適合 TM1637 的 4 位段,則可以使用 scroll() 函數滾動內容。delay 參數以毫秒為單位取值,它是字符在向左滾動之前在片段中停留的時間。
scroll('scrolling', delay=250)
最后
將代碼上傳到電路板后,TM1637 4 位數碼管模塊將顯示所有不同的數字和文本。
審核編輯:劉清
-
發光二極管
+關注
關注
13文章
1199瀏覽量
66331 -
LED驅動
+關注
關注
72文章
1004瀏覽量
138027 -
數碼管
+關注
關注
32文章
1882瀏覽量
91138 -
鎖存器
+關注
關注
8文章
906瀏覽量
41513 -
樹莓派
+關注
關注
116文章
1707瀏覽量
105660
原文標題:在樹莓派 Pico 上使用 TM1637 4 位數碼管模塊
文章出處:【微信號:趣無盡,微信公眾號:趣無盡】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
為什么TM1637驅動共陽極數碼管要用共陰極的編碼?
DS1302時鐘模塊簡介
基于SMT32的數碼管顯示程序
STM32F103單片機驅動TM1637數碼管顯示模塊的方法
采用四位數碼管實現時間的倒計時
如何用2553單片機/TM1637實現按鍵倒計時響鈴以及時間的顯示
tm1637驅動數碼管程序
TM1637 MSP430 單片機 數碼管 程序 驅動 G2553

【白嫖福利】【TM1637】簡單易懂!51單片機完整的數碼管驅動程序(數碼管和按鍵拓展芯片)
STM32F103單片機驅動TM1637數碼管顯示模塊
【Arduino】使用DS1302時鐘模塊搭配TM1637四位數碼管制作簡易電子鐘





 工商網監
工商網監
評論