 基于STM32CUBEMX驅動TOF模塊VL53l0x(3)----驅動多個VL53L0X
基于STM32CUBEMX驅動TOF模塊VL53l0x(3)----驅動多個VL53L0X
概述
在本章中,我們將探討如何同時驅動多個VL53L0X傳感器進行距離測量。我們將介紹如何有效地管理多個傳感器之間的通信和控制,以確保它們能夠同時進行準確的距離測量。通過本章的學習,將能夠了解如何利用多個VL53L0X傳感器的優勢,為應用程序提供更全面的環境感知能力。
最近在弄ST的課程,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1wN4y1X7aw/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/88332775]
修改設備地址
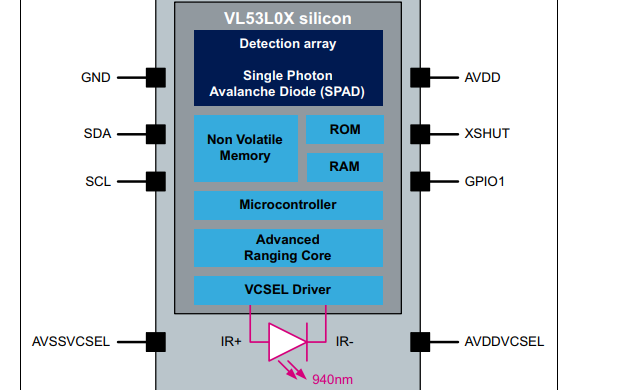
VL53L0X使用I2C總線進行通信。默認情況下,VL53L0X的7位地址為0x29。然而,為了避免地址沖突并允許多個傳感器共享相同的I2C總線,用戶可以通過向寄存器I2C_SLAVE_DEVICE_ADDRESS(寄存器地址為0x8A)寫入自定義的7位地址來修改傳感器的地址。
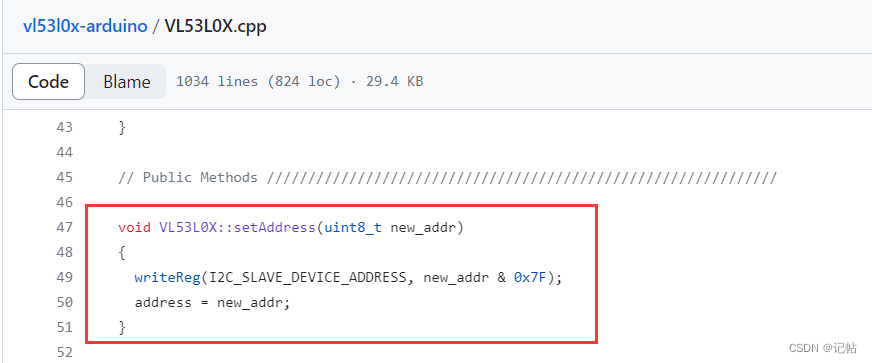
修改后如下所示。
// Public Methods //////////////////////////////////////////////////////////////
void VL53L0X_setAddress(uint8_t add,uint8_t new_addr)
{
VL53L0X_WriteByte(add,I2C_SLAVE_DEVICE_ADDRESS, new_addr & 0x7F);
}
在VL53L0X.h文件,該文件包含了VL53L0X傳感器的相關定義和配置。
在VL53L0X.h文件中,可以定義2個設備的地址常量,分別表示不同的傳感器。例如,可以使用以下方式定義地址常量:
#define VL53L0X_DEFAULT_I2C_ADDR1 0x29 ///< The fixed I2C addres
#define VL53L0X_DEFAULT_I2C_ADDR2 0x30 ///< The fixed I2C addres
以上示例展示了兩個設備地址常量的定義,分別表示不同的傳感器。可以根據您實際使用的傳感器數量和配置需求,增加或減少設備地址常量的定義。
在代碼中,可以使用這些設備地址常量來指定不同傳感器的地址。例如,如果想要使用第一個傳感器的地址,可以使用VL53L0X_DEFAULT_I2C_ADDR1來表示該地址。請注意,需要根據實際情況將這些地址常量與傳感器的物理連接和配置相對應。確保將正確的地址常量分配給相應的傳感器,以確保正確的通信和操作。
在進行地址常量定義時,建議參考VL53L0X傳感器的數據手冊和相關文檔,以了解更多關于傳感器地址和配置的詳細信息。
這里的地址值是根據實際需求和硬件連接情況選擇的,確保每個設備具有唯一的地址是非常重要的。通過使用定義的設備地址常量,可以輕松地管理和操作多個VL53L0X傳感器。通過為每個傳感器分配唯一的設備地址常量,可以在代碼中使用這些常量來指定與每個傳感器對應的地址。這樣,可以輕松地區分不同的傳感器,并發送適當的命令和配置來與每個傳感器進行通信和操作。通過使用定義的設備地址常量,可以輕松管理和操作多個傳感器,無需手動跟蹤和設置每個傳感器的地址。這提供了方便和靈活性,特別適用于需要同時使用多個VL53L0X傳感器的應用場景。
配置VL53L0X
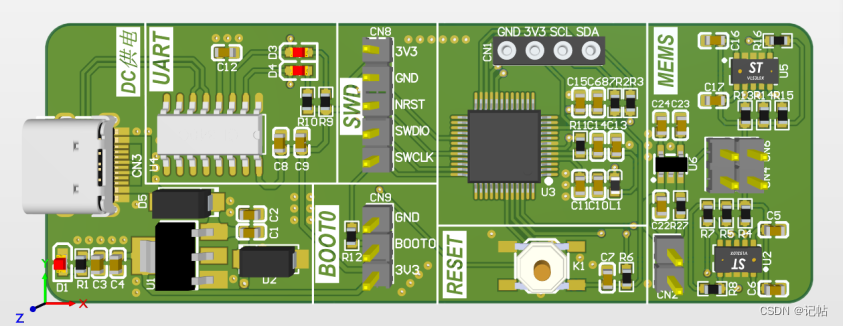
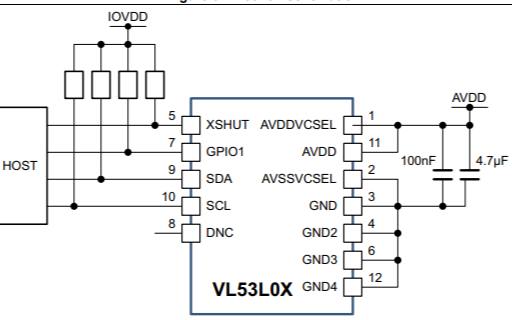
在對應的demo板子中,管腳圖如下所示。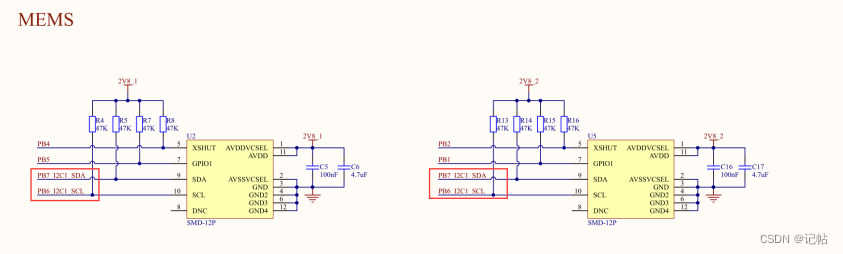
在下面代碼中,展示了對多個VL53L0X傳感器進行初始化和配置的過程。每個傳感器通過不同的管腳連接到主板上,并通過控制GPIO引腳的電平來選擇對應的傳感器進行操作。
以下是對代碼的擴展說明:
- 首先,通過控制GPIO引腳的電平,將相應的引腳設置為RESET狀態,以準備初始化對應的傳感器。具體來說,對于每個傳感器,通過控制兩個GPIO引腳,即片選,將它們設置為RESET狀態。
- 然后,通過控制GPIO引腳的電平,將相應的引腳設置為SET狀態,以選擇對應的傳感器進行操作。對于每個傳感器,通過控制兩個GPIO引腳,即片選,將它們設置為SET狀態。
- 在每次切換傳感器之后,添加了一段延時,以確保引腳狀態的切換穩定。這段延時的長度可以根據實際需求進行調整。
對每個傳感器執行以下操作:
a. 初始化傳感器,使用VL53L0X_Init函數,將傳感器的地址作為參數傳遞。
b. 通過VL53L0X_setAddress函數,修改傳感器的地址,使用VL53L0X_DEFAULT_I2C_ADDR2作為源地址。
通過代碼,可以初始化和配置多個VL53L0X傳感器,并根據需要選擇不同的傳感器進行操作。請注意,以上代碼示例僅為參考,您需要根據自己的硬件連接和需求進行相應的修改和調整。確保參考VL53L0X傳感器的文檔和數據手冊,以了解更多關于初始化、配置和操作傳感器的詳細信息。
/* USER CODE BEGIN 2 */
// 啟動第一個VL53L0X傳感器并關閉第二個VL53L0X傳感器
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
// 等待200ms以確保第一個VL53L0X傳感器啟動完成
HAL_Delay(200);
// 使用默認地址初始化第一個VL53L0X傳感器
if (!VL53L0X_Init(VL53L0X_DEFAULT_I2C_ADDR1, true))
{
printf("Failed to detect and initialize sensor!");
while (1) {} // 如果初始化失敗,則無限循環
}
// 修改第一個VL53L0X的I2C地址,以便我們可以與第二個VL53L0X傳感器通信
VL53L0X_setAddress(VL53L0X_DEFAULT_I2C_ADDR1, VL53L0X_DEFAULT_I2C_ADDR2);
// 啟動第二個VL53L0X傳感器
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_SET);
HAL_Delay(200); // 等待200ms以確保第二個VL53L0X傳感器啟動完成
// 使用之前的默認地址初始化第二個VL53L0X傳感器
if (!VL53L0X_Init(VL53L0X_DEFAULT_I2C_ADDR1, true))
{
printf("Failed to detect and initialize sensor!");
while (1) {} // 如果初始化失敗,則無限循環
}
/* USER CODE END 2 */
主程序
在代碼中,展示了如何在主程序中循環讀取2個VL53L0X傳感器的數據。以下是代碼的擴展說明:
- 在主程序的while循環中,首先使用VL53L0X_readRangeSingleMillimeters函數從VL53L0X傳感器2(設備地址為VL53L0X_DEFAULT_I2C_ADDR2)讀取距離數據然后,使用printf函數打印輸出距離值。
- 之后等待0.5秒。
- 接下來,使用VL53L0X_readRangeSingleMillimeters函數從VL53L0X傳感器1(設備地址為VL53L0X_DEFAULT_I2C_ADDR1)讀取距離數據然后,使用printf函數打印輸出距離值。
- 之后等待0.5秒。
請注意,代碼示例僅為參考,您需要根據您的實際硬件配置、VL53L0X庫和應用需求進行相應的修改和調整。確保參考VL53L0X傳感器的文檔和數據手冊,以了解更多關于數據讀取和解析的詳細信息。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// 從第二個VL53L0X傳感器讀取距離值(單位:毫米)
L = VL53L0X_readRangeSingleMillimeters(VL53L0X_DEFAULT_I2C_ADDR2);
printf("L=%d", L); // 打印從第二個VL53L0X傳感器讀取的距離值
HAL_Delay(500); // 延遲500ms(0.5秒)
// 從第一個VL53L0X傳感器讀取距離值(單位:毫米)
R = VL53L0X_readRangeSingleMillimeters(VL53L0X_DEFAULT_I2C_ADDR1);
printf("R=%d", R); // 打印從第一個VL53L0X傳感器讀取的距離值
HAL_Delay(500); // 延遲500ms(0.5秒)
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
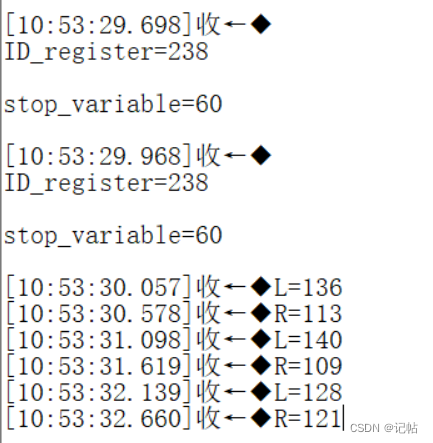
測試結果
測試距離結果如下所示。
-
驅動
+關注
關注
12文章
1840瀏覽量
85291 -
TOF
+關注
關注
9文章
483瀏覽量
36349 -
stm32cubemx
+關注
關注
5文章
283瀏覽量
14809 -
VL53L0X
+關注
關注
0文章
7瀏覽量
2490
發布評論請先 登錄
相關推薦
基于STM32CUBEMX驅動TOF模塊VL53l0x(1)----單模塊距離獲取的最佳實踐

基于STM32CUBEMX驅動TOF模塊VL53l0x(2)----修改設備地址
新一代ToF 激光測距模塊VL53L0X
VL53L0X可以永久更改I2C地址嗎?
如何減少VL53L0X FOV?
VL53L0x不會受到什么樣的材料干擾
VL53L0x環境光靈敏度無法測量距離
RT-Thread VL53L0X TOF傳感器驅動設計資料實現
請問VL53L0X的FOV范圍是多少?
VL53L0X TOF激光測距傳感器的數據手冊免費下載
微雪電子測距傳感器VL53L0X測距模塊簡介
使用STM32F103應用VL53L0X激光測距模塊的測試參考程序免費下載
VL53L0X激光測距傳感器的數據手冊免費下載
Arduino和VL53L0X飛行時間+OLED顯示教程






 工商網監
工商網監
評論