") 分布式智能指揮控制邏輯體系架構(gòu)探索
分布式智能指揮控制邏輯體系架構(gòu)探索
來(lái)源:中國(guó)指揮與控制學(xué)會(huì)
作者:林波, 黃今輝, 尹峻松.
摘要:隨著戰(zhàn)爭(zhēng)向智能化方向演進(jìn)發(fā)展,分布式智能指揮控制正成為新的指揮控制模式,智能技術(shù)賦能網(wǎng)絡(luò)信息體系,作戰(zhàn)體系按需構(gòu)建和作戰(zhàn)能力即時(shí)生成成為可能。在“分布式作戰(zhàn)”“馬賽克戰(zhàn)”等概念分析基礎(chǔ)上,提出了分布式智能指揮控制的體系架構(gòu)、運(yùn)行機(jī)制和關(guān)鍵技術(shù),為分布式智能指揮控制研究提供了新的思路與借鑒參考。
人工智能技術(shù)不斷發(fā)展,智能技術(shù)效用不斷增強(qiáng),在“智能+”的作用下,智能化戰(zhàn)爭(zhēng)樣式愈加清晰,新型指揮控制模式更加凸顯。分布式智能指揮控制逐漸成為新的戰(zhàn)場(chǎng)指揮控制模式,其戰(zhàn)場(chǎng)作用和戰(zhàn)術(shù)運(yùn)用愈加突顯。隨著智能技術(shù)發(fā)展和賦能,作戰(zhàn)體系的戰(zhàn)術(shù)終端單元種類愈加繁多、單元功能愈加豐富、智能水平不斷提高,體系內(nèi)各戰(zhàn)術(shù)單元之間的聯(lián)結(jié)方式不斷增多,這將帶來(lái)更多樣化的組合方式和能力生成模式。自主按需整合作戰(zhàn)資源,綜合更多具有智能化功能的單元模塊,能夠?qū)崿F(xiàn)作戰(zhàn)系統(tǒng)的重構(gòu),具備獨(dú)立完成特定任務(wù)的本領(lǐng)和能力。
伴隨著可用作戰(zhàn)資源數(shù)量爆炸式增長(zhǎng)、功能階躍式增強(qiáng),作戰(zhàn)系統(tǒng)能力將出現(xiàn)質(zhì)的飛躍。 智能模型和算法的發(fā)展,又為快速構(gòu)建作戰(zhàn)系統(tǒng)、形成任務(wù)能力創(chuàng)造條件。快速的戰(zhàn)場(chǎng)分析計(jì)算、加速的觀察-判斷-決策-執(zhí)行(observe-orient-decide-act,OODA)閉合,能夠?yàn)閷?shí)施作戰(zhàn)任務(wù)的作戰(zhàn)系統(tǒng)提供自主適應(yīng)作戰(zhàn)任務(wù)和戰(zhàn)場(chǎng)環(huán)境的條件,作戰(zhàn)系統(tǒng)能夠根據(jù)戰(zhàn)場(chǎng)環(huán)境、作戰(zhàn)態(tài)勢(shì)和任務(wù)需要等適時(shí)調(diào)整系統(tǒng)構(gòu)成方式和構(gòu)成模塊,并可通過(guò)軟件定義的方式修改或增強(qiáng)系統(tǒng)某些要素功能以快速響應(yīng)任務(wù)需求變化。
隨著作戰(zhàn)資源的異構(gòu)形態(tài)和跨域分布,越來(lái)越多的作戰(zhàn)平臺(tái)和單元需要指揮控制,以分布的多元異構(gòu)平臺(tái)為基礎(chǔ),集成敏捷適應(yīng)的功能模塊,進(jìn)而形成作戰(zhàn)系統(tǒng),將成為未來(lái)作戰(zhàn)體系的構(gòu)建模式,分布式智能指揮控制必然成為主要指揮控制方式。
1概念發(fā)展
分布式智能指揮控制在“分布式作戰(zhàn)”“馬賽克戰(zhàn)”“智能指揮控制”等概念的發(fā)展中逐見雛形。
1.1分布式作戰(zhàn)
分布式作戰(zhàn)通常是指分散部署在戰(zhàn)場(chǎng)上的多種作戰(zhàn)力量或作戰(zhàn)單元,基于統(tǒng)一的網(wǎng)絡(luò)信息系統(tǒng),根據(jù)戰(zhàn)局和戰(zhàn)機(jī),在沒有上級(jí)指揮機(jī)構(gòu)的指揮控制下,獨(dú)立行使指揮控制功能,組織作戰(zhàn)行動(dòng)的作戰(zhàn)。 分布式作戰(zhàn)概念最早由美國(guó)海軍提出,初衷是將打擊能力分散配置到海域范圍內(nèi)大量分布的海上平臺(tái),使敵方C4ISR能力區(qū)域飽和,難以保持對(duì)己方打擊平臺(tái)的持續(xù)偵察、跟蹤和監(jiān)視,避免高價(jià)值、多功能的海上艦艇被敵方非對(duì)稱武器所摧毀,保證己方海上平臺(tái)的安全,同時(shí)能夠從多方向同時(shí)對(duì)敵方實(shí)施遠(yuǎn)程精確、集中、靈活、突然的打擊,增加對(duì)手的防御難度。隨著技術(shù)的更迭,分布式作戰(zhàn)概念在美軍中得到廣泛關(guān)注和認(rèn)可,并不斷向“靈巧化”方向轉(zhuǎn)變,分布式作戰(zhàn)執(zhí)行任務(wù)越來(lái)越多能,指控性能不斷提升,互操作性不斷增強(qiáng)。 未來(lái)戰(zhàn)場(chǎng),功能集中的高價(jià)值作戰(zhàn)平臺(tái)將逐漸減少,功能單一的低價(jià)值作戰(zhàn)單元逐漸增加,有人系統(tǒng)將不斷減少,無(wú)人平臺(tái)將不斷增加。
分布式作戰(zhàn)體系遵循“平臺(tái)分散、效果聚合”的設(shè)計(jì)理念,作戰(zhàn)體系的設(shè)計(jì)和構(gòu)建將不再?gòu)?qiáng)調(diào)功能高度集中于某型平臺(tái)或系統(tǒng),而是將作戰(zhàn)功能分解賦予大量不同種類的異構(gòu)作戰(zhàn)模塊,利用先進(jìn)的集成技術(shù),實(shí)現(xiàn)功能的整體輸出,具有編組靈活、組網(wǎng)敏捷、自主協(xié)同等特點(diǎn)。這樣的設(shè)計(jì)和構(gòu)建模式,提高了作戰(zhàn)體系的彈性和生存能力,避免遭到對(duì)手體系性的破擊和癱瘓,也能給對(duì)手帶來(lái)戰(zhàn)場(chǎng)不可預(yù)判、缺乏征兆的戰(zhàn)術(shù)突襲效果。 分布式作戰(zhàn)在信息化戰(zhàn)爭(zhēng)中萌芽,在智能化戰(zhàn)爭(zhēng)發(fā)展,特別是網(wǎng)絡(luò)信息技術(shù)和智能技術(shù)的突破,將促進(jìn)分布式作戰(zhàn)在戰(zhàn)爭(zhēng)中的廣泛運(yùn)用,成為戰(zhàn)爭(zhēng)新形態(tài)。與傳統(tǒng)的集中式作戰(zhàn)相比,分布式作戰(zhàn)在作戰(zhàn)平臺(tái)的互操作性能、協(xié)作水平、作戰(zhàn)速度、存活概率、毀傷程度、戰(zhàn)場(chǎng)態(tài)勢(shì)利用率等方面都有大幅度提升。
面向分布式作戰(zhàn)需求,分布式指揮控制應(yīng)運(yùn)而生。分布式指揮控制與集中式指揮控制相對(duì)應(yīng),相較于集中式指揮控制,分布式指揮控制具有層次結(jié)構(gòu)更扁平、任務(wù)部署更靈活、行動(dòng)控制更敏捷、作戰(zhàn)企圖更隱蔽等特征。在分布式指揮控制的體系中,感知、決策、行動(dòng)等作戰(zhàn)要素和作戰(zhàn)單元能夠更加靈活、動(dòng)態(tài)、多樣化、自適應(yīng)的組合,按需組合形成預(yù)期能力,讓對(duì)手摸不清、探不明,帶來(lái)決策上的突然、行動(dòng)上的突襲、效果上的突破。
1.2馬賽克戰(zhàn)
“馬賽克戰(zhàn)”是分布式作戰(zhàn)發(fā)展的新內(nèi)容,其核心思想是:通過(guò)綜合集成、有機(jī)結(jié)合、動(dòng)態(tài)調(diào)整的方式,將各類傳感器、武器終端以及低成本、功能單一的系統(tǒng)或平臺(tái)集成為按需定制、彈性魯棒、靈活機(jī)動(dòng)的作戰(zhàn)體系,以實(shí)現(xiàn)感知、決策及執(zhí)行等多重環(huán)節(jié)或行動(dòng)的按需配置。 “馬賽克戰(zhàn)”是基于系統(tǒng)工程思想的一種旨在滿足未來(lái)動(dòng)態(tài)戰(zhàn)略環(huán)境對(duì)作戰(zhàn)能力需求和作戰(zhàn)時(shí)效要求的作戰(zhàn)樣式。
“馬賽克戰(zhàn)”繼承和發(fā)展了分布式作戰(zhàn)理念,基于先進(jìn)網(wǎng)絡(luò)連接和實(shí)時(shí)共享技術(shù),在設(shè)計(jì)階段將過(guò)去作戰(zhàn)高價(jià)值平臺(tái)的作戰(zhàn)功能分解為更小的作戰(zhàn)模塊,在集成階段利用模塊的各種重組方式實(shí)現(xiàn)作戰(zhàn)能力的重構(gòu)。“馬賽克戰(zhàn)”是一種拼圖式的作戰(zhàn),其核心是“要素拼圖”,各作戰(zhàn)要素靈活拼組方式能很好地適應(yīng)作戰(zhàn)環(huán)境變化和任務(wù)要求。 “馬賽克戰(zhàn)”強(qiáng)調(diào)作戰(zhàn)指揮控制體系向戰(zhàn)術(shù)端放權(quán),將指揮決策向戰(zhàn)術(shù)末端轉(zhuǎn)移,可認(rèn)為是一種典型的邊緣作戰(zhàn),考慮由戰(zhàn)術(shù)邊緣完成指揮控制,由戰(zhàn)術(shù)節(jié)點(diǎn)能力的組合來(lái)編配戰(zhàn)場(chǎng)“殺傷網(wǎng)”,弱化核心指揮節(jié)點(diǎn)和跨域指揮節(jié)點(diǎn)的作用,推動(dòng)實(shí)現(xiàn)戰(zhàn)術(shù)端邊緣組織、跨域聯(lián)合、全域聚合。
“馬賽克戰(zhàn)”始終圍繞作戰(zhàn)決策展開,以分布式管理高效實(shí)現(xiàn)去中心化的多域聯(lián)合作戰(zhàn)能力,利用智能技術(shù)加快OODA循環(huán),結(jié)合全局的戰(zhàn)場(chǎng)態(tài)勢(shì)組織作戰(zhàn)行動(dòng),實(shí)現(xiàn)比對(duì)手更快、更高效的決策中心戰(zhàn)。其制勝核心主要在于決策制定和能力生成,以快速?zèng)Q策牽引能力生成,獲得時(shí)間優(yōu)勢(shì)和行動(dòng)優(yōu)勢(shì),累積決策優(yōu)勢(shì),實(shí)現(xiàn)認(rèn)知域的制勝突破,完成對(duì)信息域和物理域的優(yōu)勢(shì)控制。
1.3智能指揮控制
技術(shù)的迭代革新將推動(dòng)戰(zhàn)爭(zhēng)發(fā)展進(jìn)入智能化時(shí)代,智能化平臺(tái)與系統(tǒng)成為戰(zhàn)場(chǎng)主角,智能化戰(zhàn)爭(zhēng)將成為未來(lái)戰(zhàn)爭(zhēng)的主要樣式。人機(jī)共生對(duì)抗、有人/無(wú)人協(xié)同作戰(zhàn)、無(wú)人自主作戰(zhàn)、無(wú)人集群協(xié)同作戰(zhàn)等將成為智能化作戰(zhàn)的典型作戰(zhàn)樣式。智能化戰(zhàn)爭(zhēng)將呈現(xiàn)出作戰(zhàn)空間全域拓展、作戰(zhàn)時(shí)間極限壓縮、戰(zhàn)場(chǎng)情況全維透明、作戰(zhàn)決策人機(jī)共生、作戰(zhàn)武器智能自主等特點(diǎn)。 面向智能化戰(zhàn)爭(zhēng)的智能指揮控制將呈現(xiàn)自主高效、敏捷相應(yīng)、按需滿足、精準(zhǔn)調(diào)控實(shí)現(xiàn)等特征。在智能技術(shù)的影響下,指揮控制在一定程度上具備戰(zhàn)場(chǎng)目標(biāo)自動(dòng)識(shí)別、戰(zhàn)場(chǎng)態(tài)勢(shì)智能感知、情報(bào)信息智能處理、智能任務(wù)規(guī)劃和輔助決策等能力,可有效提升殺傷鏈的智能化水平。
同時(shí)以智賦能、以智聚能、以智釋能的智能指揮控制將實(shí)現(xiàn)對(duì)OODA的賦能和重塑,使得指揮控制更快更好更有效。以智賦能,即利用智能技術(shù)對(duì)作戰(zhàn)平臺(tái)賦能、對(duì)作戰(zhàn)環(huán)節(jié)賦能,使得平臺(tái)獲得更優(yōu)的性能指標(biāo)、環(huán)節(jié)實(shí)現(xiàn)更快的時(shí)效響應(yīng);以智聚能,即利用智能技術(shù)和算法快速構(gòu)建作戰(zhàn)系統(tǒng),聚合作戰(zhàn)平臺(tái),形成作戰(zhàn)能力,以更好的構(gòu)建方式、更優(yōu)的聚合模式,實(shí)現(xiàn)更充盈的作戰(zhàn)能力;以智釋能,利用智能算法和智能技術(shù),使得作戰(zhàn)體系能在最佳的時(shí)間、最恰當(dāng)?shù)目臻g,釋放作戰(zhàn)體系效能,產(chǎn)生最有利于完成作戰(zhàn)任務(wù)、實(shí)現(xiàn)作戰(zhàn)目標(biāo)的效果。 “馬賽克戰(zhàn)”的指揮控制是典型的智能指揮控制方式,一方面利用智能技術(shù)加快決策時(shí)間,提升指揮質(zhì)效,另一方面利用智能技術(shù)優(yōu)化控制實(shí)體和控制方式,降低控制負(fù)荷,為決策提供更多可能的選項(xiàng)支撐。目前已有利用空間抓取技術(shù)(spatial grasp technology, SGT)、基于主體方法、博弈方法和免疫系統(tǒng)分析等方法研究“馬賽克戰(zhàn)”指揮控制,利用多智能體強(qiáng)化學(xué)習(xí)、群體智能決策等算法研究戰(zhàn)術(shù)級(jí)指揮控制問(wèn)題,探索了大數(shù)據(jù)智能指揮控制的機(jī)理框架和模型等。
2分布式智能指揮控制體系架構(gòu)
分布式智能指揮控制將實(shí)現(xiàn)分布式指揮控制和智能指揮控制的融合,繼承分布式指揮控制的靈活適變和智能指揮控制的智能高效,形成新的優(yōu)勢(shì)指揮控制模式。 分布式智能指揮控制將以系統(tǒng)工程、網(wǎng)絡(luò)科學(xué)和智能技術(shù)為基礎(chǔ),實(shí)現(xiàn)作戰(zhàn)平臺(tái)抽象化、作戰(zhàn)任務(wù)編目化、作戰(zhàn)決策邊緣化、作戰(zhàn)行動(dòng)多樣化,利用算法和軟件定義作戰(zhàn)體系,基于模型和構(gòu)件生成作戰(zhàn)能力,實(shí)現(xiàn)作戰(zhàn)任務(wù)與作戰(zhàn)資源的優(yōu)化匹配,達(dá)到在最合適的時(shí)間、最有效的區(qū)域,利用最集約的手段,產(chǎn)生最有效的作戰(zhàn)效果。 分布式智能指揮控制的邏輯架構(gòu)如圖1所示。
作戰(zhàn)任務(wù)通過(guò)邏輯分解形成作戰(zhàn)任務(wù)集,作戰(zhàn)任務(wù)集是各類型任務(wù)的上下邏輯關(guān)系,及各類型任務(wù)完成狀態(tài)的指標(biāo)標(biāo)準(zhǔn)的集合,包含作戰(zhàn)任務(wù)及對(duì)應(yīng)的預(yù)期狀態(tài)指標(biāo)、標(biāo)準(zhǔn)和效果等。作戰(zhàn)單元抽象聚合形成作戰(zhàn)資源池,作戰(zhàn)資源池是所有可操作作戰(zhàn)單元的集合,包含作戰(zhàn)單元的能力指標(biāo)、性能參數(shù)、運(yùn)用規(guī)律等屬性,可根據(jù)功能分類形成觀察類資源、判斷類資源、決策類資源和執(zhí)行類資源。戰(zhàn)場(chǎng)態(tài)勢(shì)抽象表征為作戰(zhàn)約束條件,作戰(zhàn)約束集是各類作戰(zhàn)限制因素的集合,包含戰(zhàn)場(chǎng)物理環(huán)境、信息環(huán)境等限制作戰(zhàn)單元效能釋放的因素。進(jìn)一步,利用智能算法模型將作戰(zhàn)任務(wù)集、作戰(zhàn)約束集和作戰(zhàn)資源池中的元素進(jìn)行匹配整合,構(gòu)建形成任務(wù)映射表、資源組合包,利用指控算法將任務(wù)與資源進(jìn)行關(guān)聯(lián)映射,將對(duì)應(yīng)的任務(wù)表、資源包及時(shí)序邏輯、運(yùn)用規(guī)則等內(nèi)容打包封裝,輸出為作戰(zhàn)效應(yīng)集,完成分布式智能指揮控制。
智能算法模型支撐分布式指揮控制全過(guò)程。在抽象與分解階段,利用智能模型算法實(shí)現(xiàn)作戰(zhàn)任務(wù)集的顆粒度控制,選擇適宜的分解方法和顆粒度,為后續(xù)作戰(zhàn)任務(wù)的匹配整合提供條件;利用智能模型算法完成作戰(zhàn)單元屬性的抽象聚合,形成編目化資源池,為可匹配整合操作提供基礎(chǔ);利用智能模型算法實(shí)現(xiàn)戰(zhàn)場(chǎng)態(tài)勢(shì)的抽象表征,將描述性、定性化場(chǎng)景抽象為可量化可操作的約束條件,為后續(xù)優(yōu)化操作提供基礎(chǔ)條件。
在匹配整合階段,基于先進(jìn)的智能算法和模型,實(shí)現(xiàn)作戰(zhàn)任務(wù)集與作戰(zhàn)資源池中元素在戰(zhàn)場(chǎng)約束條件下的匹配整合,構(gòu)建形成任務(wù)映射表、指控算法庫(kù)和資源組合包,確定由任務(wù)映射到資源組合的對(duì)應(yīng)關(guān)系。在適配輸出階段,智能模型算法將預(yù)設(shè)的作戰(zhàn)效應(yīng)與現(xiàn)實(shí)條件進(jìn)行適應(yīng)性匹配,自動(dòng)選擇和調(diào)優(yōu)解決方案,實(shí)現(xiàn)適配的作戰(zhàn)效應(yīng)輸出。同時(shí)智能模型和算法還實(shí)時(shí)監(jiān)控指揮控制的作戰(zhàn)能力狀態(tài)和費(fèi)效情況,及時(shí)反饋,實(shí)時(shí)調(diào)整體系構(gòu)成,使體系始終處于優(yōu)化狀態(tài)運(yùn)轉(zhuǎn)。
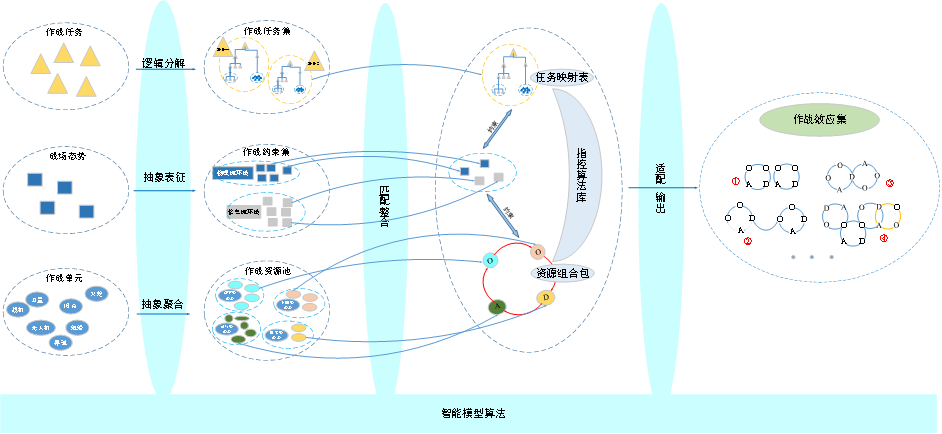
圖 1 分布式智能指揮控制邏輯架構(gòu)
Fig. 1 Distributed intelligent command and control logical architecture
基于分布式智能指揮控制的邏輯關(guān)系,設(shè)計(jì)了一種分布式智能指揮控制體系架構(gòu),如圖2所示。該體系架構(gòu)可分為三層:基礎(chǔ)層、集成層和應(yīng)用層。基礎(chǔ)層由作戰(zhàn)實(shí)體資源、數(shù)據(jù)模型資源和智能服務(wù)資源構(gòu)成,包含分布式作戰(zhàn)指揮控制的物質(zhì)基礎(chǔ);集成層是根據(jù)分布式作戰(zhàn)原理和作戰(zhàn)體系構(gòu)建邏輯,在智能算法和模型的支撐下,基于作戰(zhàn)資源構(gòu)建形成分布式作戰(zhàn)要素,包括分布式作戰(zhàn)任務(wù)管理、分布式作戰(zhàn)資源管理、分布式信息處理和分布式集成控制等內(nèi)容;應(yīng)用層是針對(duì)各類任務(wù),集成多個(gè)感知、決策和效應(yīng)等作戰(zhàn)要素,構(gòu)建形成多領(lǐng)域多維度的殺傷鏈/殺傷網(wǎng),生成作戰(zhàn)任務(wù)響應(yīng)能力,完成分布式指揮控制。
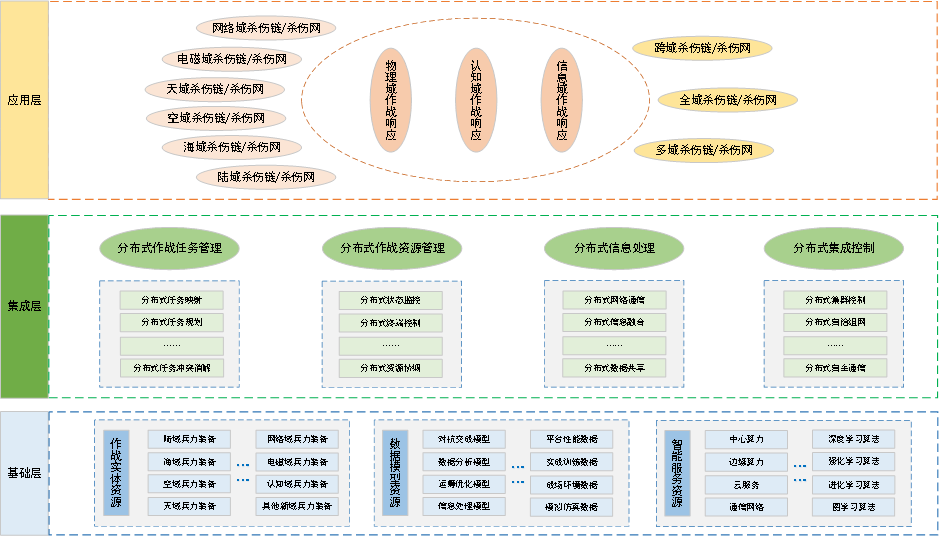
圖 2 分布式智能指揮控制體系架構(gòu)
Fig. 2 Distributed intelligent command and control system architecture
2.1任務(wù)映射表
任務(wù)映射是利用系統(tǒng)工程論思想將作戰(zhàn)任務(wù)逐級(jí)分解形成層次化或網(wǎng)絡(luò)化的任務(wù)體系,并與完成任務(wù)所需的能力指標(biāo)形成對(duì)應(yīng)關(guān)系的過(guò)程。對(duì)于層次化的總體任務(wù),總體作戰(zhàn)任務(wù)可按任務(wù)屬性或按要素構(gòu)成分解為分支作戰(zhàn)任務(wù),對(duì)分支作戰(zhàn)任務(wù)進(jìn)一步分解,可得到大量原子作戰(zhàn)任務(wù)。原子作戰(zhàn)任務(wù)可認(rèn)為是各類戰(zhàn)術(shù)單元群能夠獨(dú)立完成的任務(wù)形態(tài),通常由戰(zhàn)術(shù)指揮機(jī)構(gòu)進(jìn)行指揮控制。戰(zhàn)術(shù)指揮機(jī)構(gòu)可以圍繞原子任務(wù)構(gòu)建作戰(zhàn)系統(tǒng),組織作戰(zhàn)行動(dòng)。
對(duì)于網(wǎng)絡(luò)化的作戰(zhàn)任務(wù),不能完成逐層解耦,則可采用集中式指揮控制與分布式指揮控制相結(jié)合的方式,減少指揮控制層級(jí),聚焦全局實(shí)施越級(jí)跨域指揮控制。 完成作戰(zhàn)任務(wù)分解后,將形成作戰(zhàn)任務(wù)體系。該體系包含各類任務(wù)及任務(wù)的邏輯關(guān)系。指揮控制過(guò)程需將任務(wù)體系中的原子任務(wù)與完成該任務(wù)所需的能力狀態(tài)進(jìn)行關(guān)聯(lián)映射,如圖3所示,通過(guò)能力指標(biāo)進(jìn)行邏輯表征,為后續(xù)的基于能力需要構(gòu)建作戰(zhàn)體系提供條件,從而實(shí)現(xiàn)“馬賽克”式的分布式指揮控制與體系構(gòu)建。
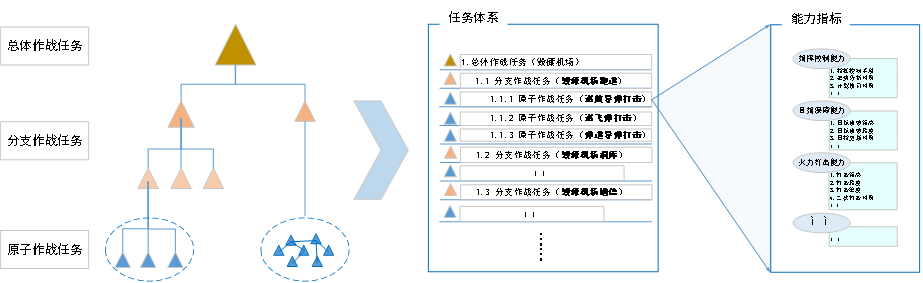
圖 3 作戰(zhàn)任務(wù)向能力映射示意圖
Fig. 3 Schematic diagram of mapping of operation tasks to capability
分布式智能指揮控制能在智能算法的支撐下,實(shí)現(xiàn)對(duì)任務(wù)的分解與解耦、任務(wù)與能力的映射與表征,并形成軟件定義的任務(wù)映射列表,能夠?yàn)楹罄m(xù)與作戰(zhàn)資源的匹配提供基礎(chǔ)。
2.2資源組合包
智能化戰(zhàn)場(chǎng)上,作戰(zhàn)單元不僅具備較高的智能水平,而且數(shù)量眾多,呈現(xiàn)類型多樣化、分布全域化、形態(tài)異構(gòu)化等特點(diǎn),直接運(yùn)用于作戰(zhàn)體系的設(shè)計(jì)和構(gòu)建將很難具有任務(wù)針對(duì)性和環(huán)境適應(yīng)性,且耗時(shí)費(fèi)力。遵循作戰(zhàn)任務(wù)需求牽引作戰(zhàn)能力生成的原則,在智能算法和模型的支撐下,將所有作戰(zhàn)資源數(shù)據(jù)化,構(gòu)建數(shù)據(jù)池,并根據(jù)任務(wù)匹配需求,選擇池中合適資源組合生成任務(wù)能力。 池化的作戰(zhàn)資源將包含特征屬性與忙閑狀態(tài),通過(guò)有效的任務(wù)規(guī)劃,完成資源屬性與任務(wù)需求的匹配,可避免作戰(zhàn)實(shí)體單位被任務(wù)重復(fù)分配或過(guò)度空閑所導(dǎo)致的資源利用率低、任務(wù)完成度低等情況。
2.3指控算法庫(kù)
指控算法庫(kù)是分布式智能指揮控制的重要內(nèi)容,其中包括作戰(zhàn)任務(wù)與作戰(zhàn)資源的映射關(guān)系、作戰(zhàn)時(shí)空約束與作戰(zhàn)資源調(diào)配的優(yōu)化策略、態(tài)勢(shì)變化趨勢(shì)與決策調(diào)整方向的影響關(guān)系、作戰(zhàn)實(shí)體與作戰(zhàn)行動(dòng)的邏輯時(shí)序關(guān)系等。利用指控算法庫(kù),分布式智能指揮控制能夠更快更好的完成態(tài)勢(shì)融入、應(yīng)變決策、資源整合、沖突消解、效果評(píng)估、組網(wǎng)共享等活動(dòng),有效支撐OODA環(huán)快速形成閉合。
2.4作戰(zhàn)效應(yīng)集
作戰(zhàn)效應(yīng)集包含戰(zhàn)場(chǎng)態(tài)勢(shì)下完成作戰(zhàn)任務(wù)的作戰(zhàn)行動(dòng)序列和邏輯時(shí)序關(guān)系、運(yùn)用條件規(guī)則等,包含感知、決策和行動(dòng)等內(nèi)容。指揮決策的基本過(guò)程是“觀察-判斷-決策-執(zhí)行”的過(guò)程(OODA環(huán)),對(duì)抗雙方的每一次決策行動(dòng)都是指揮控制過(guò)程的一次循環(huán)。因而,作戰(zhàn)任務(wù)與作戰(zhàn)行動(dòng)的關(guān)系可用OODA環(huán)的形式抽象表征。
在傳統(tǒng)的指揮控制模式下,作戰(zhàn)效應(yīng)輸出為多個(gè)獨(dú)立OODA環(huán)的串聯(lián)或并聯(lián)模式,環(huán)與環(huán)之間交叉作用較少。在分布式智能指揮控制模式中,其作戰(zhàn)效應(yīng)輸出模式多樣,既有傳統(tǒng)的OODA環(huán)串聯(lián)、并聯(lián)樣式,也有嵌入式、擴(kuò)展式的OODA環(huán),即某一個(gè)環(huán)的要素可能在另外的多個(gè)環(huán)中產(chǎn)生作用,影響多個(gè)環(huán)的形成和閉合,如圖4所示。圖4中,①示意兩個(gè)任務(wù)OODA環(huán)獨(dú)立閉合;②示意一個(gè)OODA環(huán)的D要素(決策要素)創(chuàng)建新的OODA環(huán)以完成另外的衍生任務(wù);③示意兩個(gè)耦合任務(wù)對(duì)應(yīng)的OODA環(huán)具有相同的決策要素;④示意多個(gè)耦合關(guān)聯(lián)的指揮控制任務(wù)將構(gòu)建嵌套的OODA環(huán)。 在智能算法和模型的作用下,指揮控制圍繞任務(wù)按需靈活地構(gòu)建OODA環(huán),各種類型的OODA環(huán)的集合,將形成OODA包絡(luò),即為作戰(zhàn)效應(yīng)集。作戰(zhàn)效應(yīng)集具備多種可選的行動(dòng)樣式,為分布式智能指揮控制模式提供多樣化的可選效應(yīng)手段。
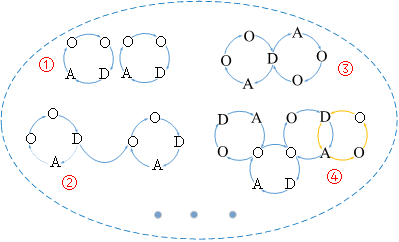
圖 4 作戰(zhàn)效應(yīng)示意圖
Fig. 4 Schematic diagram of operational effects
3分布式智能指揮控制體系運(yùn)行
分布式智能指揮控制將構(gòu)建形成按需配置、自適應(yīng)組合的作戰(zhàn)指揮控制體系,其體系運(yùn)轉(zhuǎn)主要包含兩種模式:任務(wù)驅(qū)動(dòng)式和事件觸發(fā)式。如圖5所示,任務(wù)驅(qū)動(dòng)式以作戰(zhàn)任務(wù)為原始驅(qū)動(dòng)力,由頂自下逐級(jí)分解任務(wù),驅(qū)動(dòng)體系形成,生成任務(wù)能力;事件觸發(fā)式以戰(zhàn)場(chǎng)事件為觸發(fā)條件,自底向上產(chǎn)生指揮控制需求,依據(jù)末端感知事件,構(gòu)建作戰(zhàn)體系,形成應(yīng)對(duì)策略。
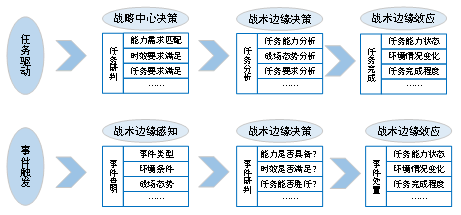
圖 5 分布式智能指揮控制體系運(yùn)行
Fig. 5 Distributed intelligent command and control systemoperation
3.1任務(wù)驅(qū)動(dòng)式指揮控制
任務(wù)驅(qū)動(dòng)式指揮控制是分布式智能指揮控制的一種樣式,是一種自上而下的指揮控制驅(qū)動(dòng)模式,主要面向主動(dòng)式作戰(zhàn)任務(wù)。以作戰(zhàn)任務(wù)為牽引,戰(zhàn)略中心決策要素根據(jù)作戰(zhàn)意圖、作戰(zhàn)任務(wù)和戰(zhàn)場(chǎng)環(huán)境,考慮能力需求匹配、時(shí)效要求滿足、任務(wù)要求滿足等因素,將任務(wù)分解并分配給戰(zhàn)術(shù)邊緣決策單元;戰(zhàn)術(shù)邊緣決策單元結(jié)合戰(zhàn)場(chǎng)實(shí)際情況,研判所需任務(wù)能力、戰(zhàn)場(chǎng)態(tài)勢(shì)、任務(wù)要求等因素,形成指揮決策;戰(zhàn)術(shù)邊緣效應(yīng)單元根據(jù)任務(wù)能力狀態(tài)、環(huán)境情況變化、任務(wù)完成程度構(gòu)建作戰(zhàn)體系、生成作戰(zhàn)能力,完成事件應(yīng)對(duì)。
3.2事件觸發(fā)式指揮控制
事件觸發(fā)式指揮控制模式是分布式智能指揮控制的另一種典型樣式,是一種自下而上的指揮控制需求驅(qū)動(dòng)模式,主要面向戰(zhàn)場(chǎng)實(shí)時(shí)情況,由戰(zhàn)術(shù)邊緣感知、戰(zhàn)術(shù)邊緣決策和戰(zhàn)術(shù)邊緣效應(yīng)組成,具有應(yīng)對(duì)戰(zhàn)場(chǎng)不確定性的能力。分布式智能指揮控制模式下,廣泛部署的戰(zhàn)術(shù)末端單元偵察監(jiān)視戰(zhàn)場(chǎng)動(dòng)向,突發(fā)的戰(zhàn)場(chǎng)事件將觸發(fā)戰(zhàn)術(shù)單元通過(guò)自主構(gòu)建OODA環(huán)進(jìn)行應(yīng)對(duì)處置。一旦戰(zhàn)術(shù)末端單元獲情,戰(zhàn)術(shù)邊緣感知單元即高效組織偵察行動(dòng),查明事件類型、環(huán)境條件、戰(zhàn)場(chǎng)態(tài)勢(shì)等內(nèi)容,形成決策輸入;戰(zhàn)術(shù)邊緣決策單元根據(jù)戰(zhàn)場(chǎng)事件和態(tài)勢(shì)信息,迅速研判作戰(zhàn)能力是否具備、時(shí)效是否達(dá)到、任務(wù)能否勝任,快速形成指揮決策;戰(zhàn)術(shù)邊緣效應(yīng)單元根據(jù)任務(wù)能力狀態(tài)、環(huán)境情況變化、任務(wù)完成程度構(gòu)建作戰(zhàn)體系、生成作戰(zhàn)能力,完成戰(zhàn)場(chǎng)事件應(yīng)對(duì)。對(duì)于戰(zhàn)術(shù)邊緣判斷不能處置和應(yīng)對(duì)的事件,戰(zhàn)術(shù)邊緣將向戰(zhàn)役中心提出指揮控制需求,由上一級(jí)指揮控制機(jī)構(gòu)組織實(shí)施指揮控制活動(dòng)。
4分布式智能指揮控制關(guān)鍵技術(shù)
分布式智能指揮控制是智能化戰(zhàn)爭(zhēng)的重要指揮控制模式,是智能技術(shù)賦能下的指揮控制,具有鮮明的技術(shù)特征。在分布式智能指揮控制架構(gòu)中,分布式作戰(zhàn)任務(wù)管理、分布式作戰(zhàn)資源管理、分布式信息處理和分布式集成控制模塊涉及的關(guān)鍵技術(shù)主要包括任務(wù)沖突消解、資源全時(shí)調(diào)控、態(tài)勢(shì)實(shí)時(shí)融合、數(shù)據(jù)信息共享、行動(dòng)實(shí)時(shí)仿真、效果即時(shí)評(píng)估等關(guān)鍵技術(shù)。
4.1任務(wù)沖突消解技術(shù)
相較于集中式指揮控制而言,任務(wù)沖突是分布式指揮控制面臨的主要問(wèn)題之一。作戰(zhàn)實(shí)體被賦予不同任務(wù)需求,帶來(lái)任務(wù)沖突,影響作戰(zhàn)任務(wù)的完成情況。避免任務(wù)沖突和任務(wù)長(zhǎng)時(shí)間的排隊(duì),是分布式指揮控制需要解決的重要問(wèn)題。任務(wù)沖突消解是分布式作戰(zhàn)任務(wù)管理的重要內(nèi)容。一種適宜的方法是將任務(wù)層次化、資源網(wǎng)格化,利用時(shí)間上切片、空間上區(qū)域化,將任務(wù)和資源概略區(qū)分,然后再以此為基礎(chǔ)綜合考慮費(fèi)效和任務(wù)完成情況進(jìn)行優(yōu)化調(diào)整。智能技術(shù)將優(yōu)化任務(wù)匹配過(guò)程,盡力從源頭避免任務(wù)沖突。在任務(wù)沖突消解中,利用智能算法實(shí)現(xiàn)全要素的任務(wù)與能力匹配,貫穿于任務(wù)規(guī)劃、任務(wù)完成的全過(guò)程,消解任務(wù)沖突,減少任務(wù)存量。主要包括基于博弈論的時(shí)空和時(shí)頻沖突消解、基于運(yùn)籌的任務(wù)優(yōu)化匹配等技術(shù)。
4.2資源全時(shí)調(diào)控技術(shù)
資源全時(shí)調(diào)控是分布式智能指揮控制的基礎(chǔ),是分布式智能指揮控制體系架構(gòu)中分布式作戰(zhàn)資源管理的核心。未來(lái)智能化戰(zhàn)爭(zhēng)中,大量多樣化異構(gòu)的作戰(zhàn)資源是作戰(zhàn)的基礎(chǔ)和核心,對(duì)于資源的管理和運(yùn)用將是指揮控制面臨的首要問(wèn)題。智能技術(shù)將促使資源管理與調(diào)控實(shí)時(shí)化、自動(dòng)化。利用智能技術(shù)和算法,將作戰(zhàn)資源數(shù)據(jù)化,構(gòu)建形成資源池,并進(jìn)行編目編碼、標(biāo)記屬性狀態(tài),自動(dòng)實(shí)時(shí)更新保鮮。通過(guò)對(duì)資源的全時(shí)管理和調(diào)控,對(duì)數(shù)據(jù)的自動(dòng)挖掘分析處理,實(shí)現(xiàn)對(duì)底數(shù)的掌握,方便為作戰(zhàn)資源適配作戰(zhàn)任務(wù)提供條件。主要包括時(shí)空基準(zhǔn)自動(dòng)調(diào)校技術(shù)、時(shí)頻監(jiān)視自主管控技術(shù)、資源狀態(tài)自動(dòng)監(jiān)視技術(shù)、資源數(shù)據(jù)自動(dòng)標(biāo)簽技術(shù)、數(shù)據(jù)自定義周期迭代更新技術(shù)等。
4.3態(tài)勢(shì)實(shí)時(shí)融合技術(shù)
分布式信息處理是分布式指揮控制的基礎(chǔ),戰(zhàn)場(chǎng)態(tài)勢(shì)的實(shí)時(shí)融合是其中關(guān)鍵內(nèi)容。在智能技術(shù)的賦能下,全域分布的感知節(jié)點(diǎn)將與全局的態(tài)勢(shì)感知中心實(shí)時(shí)連接與交互,終端態(tài)勢(shì)感知與全局態(tài)勢(shì)將實(shí)時(shí)融合。同時(shí)在統(tǒng)一的時(shí)空基準(zhǔn)下,戰(zhàn)場(chǎng)感知信息通過(guò)實(shí)時(shí)接入、精準(zhǔn)融合,實(shí)現(xiàn)戰(zhàn)場(chǎng)態(tài)勢(shì)的動(dòng)態(tài)生成、理解認(rèn)知、分布處理和可視化呈現(xiàn)等。在全局的指揮決策中樞形成態(tài)勢(shì)一張圖、終端部位形成戰(zhàn)場(chǎng)局部圖,為全局掌控態(tài)勢(shì)、局部利用態(tài)勢(shì)提供基礎(chǔ)。主要包括基于多源異構(gòu)數(shù)據(jù)的自動(dòng)分析與融合處理、基于大數(shù)據(jù)挖掘的關(guān)鍵信息提取、基于因果發(fā)現(xiàn)與知識(shí)圖譜技術(shù)的數(shù)據(jù)關(guān)聯(lián)分析、基于歸納推理的數(shù)據(jù)實(shí)時(shí)校準(zhǔn)、基于注意力機(jī)制的態(tài)勢(shì)推送與可視化呈現(xiàn)等技術(shù)。
4.4數(shù)據(jù)信息共享技術(shù)
信息化戰(zhàn)爭(zhēng)中,信息是指揮控制的基礎(chǔ)和核心,通過(guò)信息的聯(lián)系,能實(shí)現(xiàn)各類物理作戰(zhàn)單元或平臺(tái)的統(tǒng)一和連接。在智能化戰(zhàn)爭(zhēng)中,信息是智能的載體和體現(xiàn),各類分布式部署的作戰(zhàn)平臺(tái),必然伴隨能將分布式平臺(tái)聯(lián)系融合集成的信息手段和工具,實(shí)現(xiàn)融合統(tǒng)一。分布式智能指揮控制中,數(shù)據(jù)信息是基礎(chǔ),只有具備信息融合、實(shí)時(shí)共享才能實(shí)現(xiàn)作戰(zhàn)指揮控制的協(xié)調(diào)統(tǒng)一。主要包括自適應(yīng)通信鏈路構(gòu)建、通信風(fēng)險(xiǎn)自動(dòng)發(fā)現(xiàn)、智能網(wǎng)關(guān)控制、自主信息查驗(yàn)、實(shí)時(shí)信息共享、時(shí)空基準(zhǔn)自動(dòng)標(biāo)定、信道自動(dòng)加密傳輸?shù)燃夹g(shù)。
4.5行動(dòng)實(shí)時(shí)仿真技術(shù)
行動(dòng)仿真能為作戰(zhàn)計(jì)劃制定和作戰(zhàn)行動(dòng)設(shè)計(jì)提供決策參考,輔助實(shí)現(xiàn)優(yōu)化的分布式集成控制。智能化技術(shù)的發(fā)展,讓戰(zhàn)場(chǎng)具備利用平行世界、元宇宙等新型數(shù)字技術(shù)的條件,讓實(shí)時(shí)仿真成為可能。在分布式集成控制前,引接實(shí)時(shí)戰(zhàn)場(chǎng)態(tài)勢(shì),模擬行動(dòng)方案,評(píng)估行動(dòng)效果,為實(shí)時(shí)的計(jì)劃制定和行動(dòng)設(shè)計(jì)提供參考,支撐分布式智能指揮控制的有效組織和實(shí)施。主要包括戰(zhàn)場(chǎng)環(huán)境構(gòu)設(shè)、行為抽象仿真、智能仿真引擎等技術(shù)。
4.6效果即時(shí)評(píng)估技術(shù)
效果評(píng)估是指揮控制形成閉環(huán)的必要環(huán)節(jié)。分布式智能指揮控制中,全域部署的智能化戰(zhàn)場(chǎng)終端為效果評(píng)估即時(shí)完成提供條件。大量的戰(zhàn)場(chǎng)感知要素,可以即時(shí)跟蹤和掌握戰(zhàn)場(chǎng)動(dòng)態(tài),回傳戰(zhàn)場(chǎng)信息,評(píng)估行動(dòng)效果,為后續(xù)作戰(zhàn)決策和行動(dòng)提供觸發(fā)條件,保證指揮控制的效果。主要包括目標(biāo)情報(bào)自動(dòng)偵察、遙感圖像智能解譯、目標(biāo)動(dòng)向智能研判、關(guān)鍵信息提取分析、數(shù)據(jù)自動(dòng)分析比對(duì)等技術(shù)。
5結(jié)論
分布式智能指揮控制是適應(yīng)未來(lái)智能化戰(zhàn)爭(zhēng)發(fā)展的指揮控制方式,是實(shí)現(xiàn)作戰(zhàn)體系按需構(gòu)建、作戰(zhàn)能力即時(shí)生成的基礎(chǔ)條件。本文提出了一種分布式智能指揮控制體系架構(gòu),是對(duì)未來(lái)以決策為中心的“馬賽克戰(zhàn)”作戰(zhàn)樣式的指揮控制方式的探索,適應(yīng)了智能化戰(zhàn)爭(zhēng)的需要。在分布式智能指揮控制中,決策權(quán)限向戰(zhàn)術(shù)末端靠近,自主的戰(zhàn)場(chǎng)決策方式,更容易形成決策優(yōu)勢(shì),構(gòu)建形成的作戰(zhàn)體系更能應(yīng)對(duì)戰(zhàn)場(chǎng)態(tài)勢(shì)的瞬息萬(wàn)變,并能適時(shí)作出及時(shí)可靠的響應(yīng),實(shí)現(xiàn)殺傷鏈和“殺傷網(wǎng)”的敏捷構(gòu)建,推動(dòng)戰(zhàn)術(shù)端的多域融合攻擊與全域降維打擊。戰(zhàn)術(shù)單元平常以分散狀態(tài)存在,戰(zhàn)時(shí)按需動(dòng)態(tài)組合,能夠?qū)崿F(xiàn)戰(zhàn)術(shù)意圖隱藏,讓對(duì)手難以摸清己方戰(zhàn)術(shù)意圖,制造新的“戰(zhàn)爭(zhēng)迷霧”,在認(rèn)知域中累積新的優(yōu)勢(shì),最終實(shí)現(xiàn)物理域、信息域和認(rèn)知域的全面聯(lián)合攻防優(yōu)勢(shì)。
審核編輯:黃飛
-
人工智能
+關(guān)注
關(guān)注
1791文章
47279瀏覽量
238513 -
智能算法
+關(guān)注
關(guān)注
0文章
77瀏覽量
11933 -
指揮控制
+關(guān)注
關(guān)注
0文章
5瀏覽量
6059
原文標(biāo)題:一種分布式智能指揮控制體系架構(gòu)
文章出處:【微信號(hào):AI智勝未來(lái),微信公眾號(hào):AI智勝未來(lái)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
分布式軟件系統(tǒng)
一文讀懂分布式架構(gòu)知識(shí)體系(內(nèi)含超全核心知識(shí)大圖)
集中式電源架構(gòu)和分布式電源架構(gòu)
基于MVC模式的分布式作戰(zhàn)指揮系統(tǒng)研究
基于MapReduce架構(gòu)的分布式母線保護(hù)
什么是分布式系統(tǒng) 分布式架構(gòu)有哪些
訊維分布式可視化控制系統(tǒng)大大提高指揮決策的準(zhǔn)確性
分布式智能電網(wǎng)的核心意義
訊維分布式智能控制系統(tǒng)助力應(yīng)急指揮調(diào)度系統(tǒng)快速發(fā)展!

分布式智慧指揮系統(tǒng):訊維引領(lǐng)未來(lái)作戰(zhàn)方式的創(chuàng)新之舉
分布式智慧指揮系統(tǒng):引領(lǐng)指揮控制系統(tǒng)轉(zhuǎn)型升級(jí)的新篇章
基于邏輯分析的分布式PLC設(shè)計(jì)

什么是分布式架構(gòu)?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論