 如何使用StateAMS狀態機對具有閾值和滯后的理想開關進行建模?
如何使用StateAMS狀態機對具有閾值和滯后的理想開關進行建模?
描述
理想開關的打開(關閉或停用)關閉(打開或激活)由施加在開關控制端子上的控制信號控制,用戶可以根據閾值電平和滯后定義的操作區域進一步提高可控性。
具有閾值和滯后的開關通常用于開關應用中,以避免系統振蕩。它們有助于減少具有機械負載(泵或電機)的系統不穩定性并減少磨損。它們通過啟用穩定的控制回路來幫助提高系統的可靠性。
在理想的開關中,開關的電阻是根據其工作狀態選擇的。在導通狀態期間,開關的電阻將非常低,因此滿載電流流過開關,同時在器件上施加的壓降最小。在關斷狀態期間,開關的電阻將非常高,因此流過開關的電流非常低,并且在開關兩端施加了全壓降。
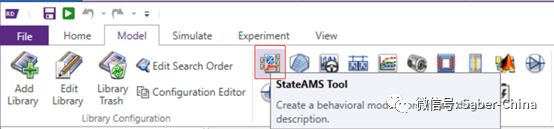
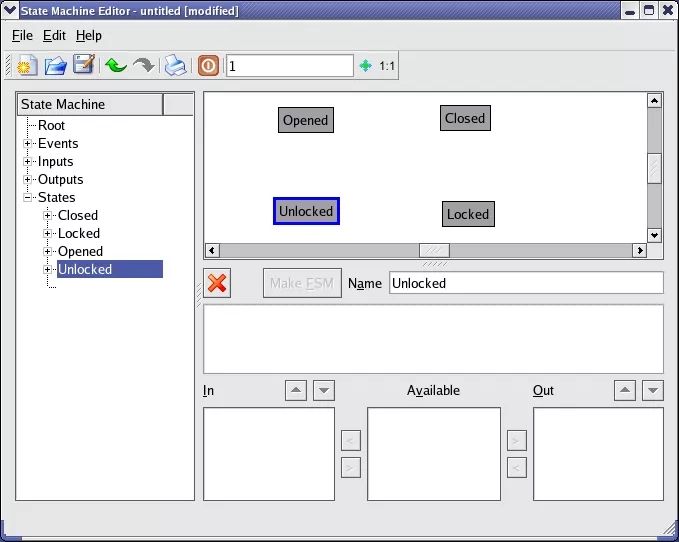
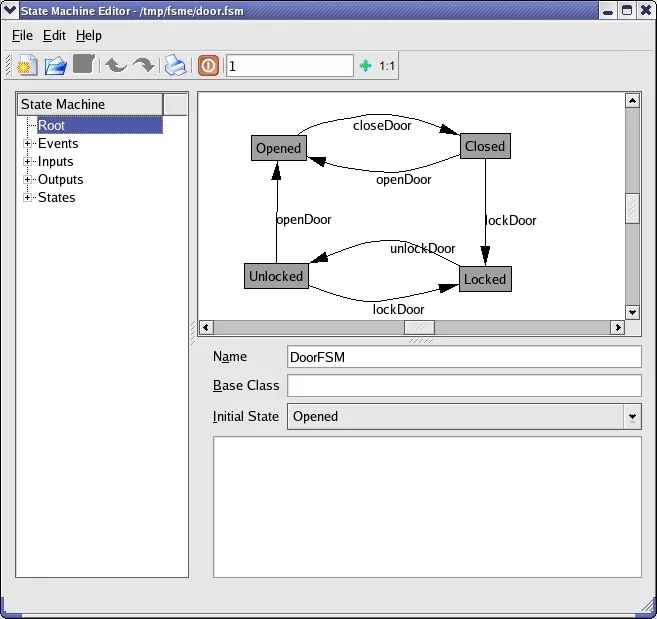
使用SaberRD中的StateAMS狀態機建模工具直觀地對具有閾值和滯后的理想開關進行建模。StateAMS 工具允許從基于狀態圖和方程的獨立于語言的描述中創建混合信號有限狀態機模型。有關詳細的建模技術,請參閱工具幫助文檔。
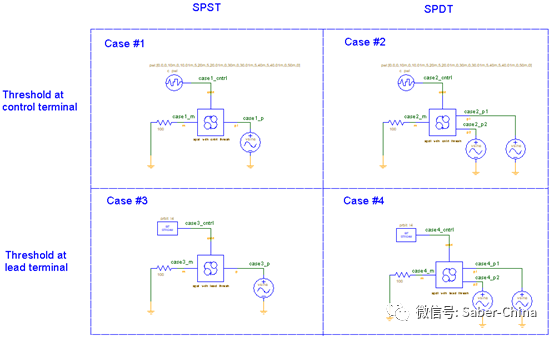
您可以根據您的應用設計不同類型的開關。本文描述了四種不同的用例。
Case 1 - 單刀單擲開關在控制終端進行閾值檢查
Case 2 - 單刀雙擲開關在控制終端進行閾值檢查
Case 3 - 單刀單擲開關在引線端子處進行閾值檢查
Case 4 - 單刀雙擲開關在引線端子處進行閾值檢查
向下滾動到每個用例以了解使用 StateAMS 建模工具實現的開關行為和建模技術。
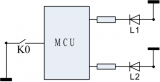
文后提供了test_design.zip示例下載,使用示例中提供的測試設計文件和實驗測試文件,可以驗證上述四種不同開關的實現。在SaberRD中打開測試設計test.ai_dsn,下圖1是四種案例的電路原理圖,運行實驗測試文件 test_bench.ai_expt即可。
1、Case 1
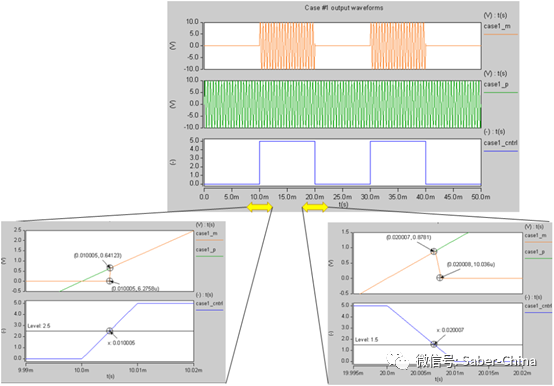
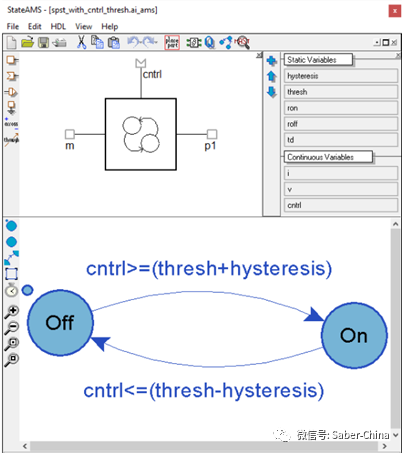
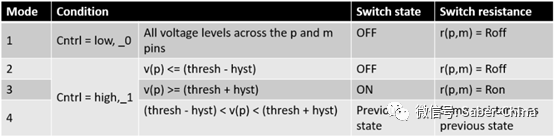
單刀單擲開關 (SPST) 是通過控制終端提供的閾值檢查創建的。SPST開關常開。當控制信號值 v(cntrl) 變得大于或等于提供的閾值和滯后的總和 (v(cntrl) >= (thresh + hyst)) 時,開關閉合。表1給出了在控制端帶有閾值檢查的SPST的不同操作模式。
在模式3中,當控制信號值落在這兩個檢查點之間,即 ((thresh - hyst) < v(cntrl) < (thresh + hyst)) 時,開關將根據之前的狀態保持打開或關閉施加控制信號的開關。例如,假設開關閉合(ON 狀態),即 (v(cntrl) >= (thresh + hyst))。
現在,要打開開關(關閉),控制信號電平必須小于或等于 (thresh-hyst)。因此,直到控制信號電平從 ON 狀態下降到 v(cntrl) <= (thresh - hyst) 的電平之前,開關仍像之前的狀態一樣處于 ON 狀態。同樣,一旦開關打開(OFF),開關將保持OFF,直到控制信號大于或等于(thresh+hyst)。
因此,當控制信號電平從關閉狀態上升到 v(cntrl) >= (thresh + hyst) 的電平時,開關仍像之前的狀態一樣處于關閉狀態。模式3的存在是由于模型中存在滯后。當滯后為零時,模式3不存在。
表1控制端帶有閾值檢查的SPST操作模式

下面是StateAMS 狀態機模型。

下面是實驗結果。仿真完成后,從結果窗格中打開圖表 Case1。
2、Case 2
單刀雙擲開關 (SPDT) 是通過控制終端提供的閾值檢查創建的。SPDT 在p1端子處常閉 (NC),在p2端子處常開 (NO)。開關根據控制信號值切換p1和p2端子之間的連接。控制信號必須大于或等于(閾值 + 遲滯)才能使開關從p1切換到p2。
然后,控制信號值必須小于或等于(閾值 - 滯后),以便開關從p2切換回p1。表2給出了在控制終端進行閾值檢查的SPDT的不同操作模式。模式3的存在是由于模型中存在滯后現象,如Case1 所述。
表2控制端帶有閾值檢查的SPDT操作模式

下面是StateAMS 狀態機模型。
下面是實驗結果,從結果窗格中打開圖表 Case2。

3、Case 3
單刀單擲開關 (SPST) 是通過引線端子處提供的閾值檢查創建的。除了提供的控制信號外,該模型還會在關閉和打開開關之前檢查 p 端子的閾值電平。
在此模型中,控制端子是數字的,必須由數字源驅動。只有當控制信號為高電平或l4_1,且p端電壓大于等于(thresh+hyst)時,開關才閉合。表 3 給出了在 p 端進行閾值檢查的 SPST 的不同操作模式。模式 4 的存在是由于模型中存在滯后,如案例 #1 的模式 3 中所述。
表3在 p 端進行閾值檢查的SPST的不同操作模式
下面是StateAMS模型。
注意:L4_0和l4_1等MAST數字值在StateAMS建模工具中分別表示為“0”和“1”。

下面是實驗結果,從結果窗格中打開圖表 Case3。

4、Case 4
單刀雙擲開關 (SPDT) 是通過引線端子處提供的閾值檢查創建的。除了提供的控制信號外,模型還會在切換連接之前檢查p1和p2端子的閾值電平。
在這個模型中,控制端是數字的,它必須由數字源驅動。該模型的初始狀態是在p1和p2端常開。表4給出了在引線端子處進行閾值檢查的SPDT的不同操作模式。模式3和6的存在是由于模型中存在滯后現象,如Case1中模式3所述。
表4在引線端子處進行閾值檢查的SPDT的不同操作模式
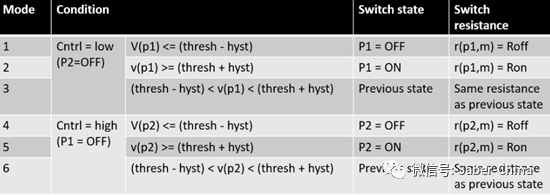
下面是StateAMS模型。
注意:L4_0和l4_1等MAST數字值在StateAMS建模工具中分別表示為“0”和“1”。

從結果窗格中打開圖表 Case4查看結果:

-
SPST
+關注
關注
0文章
39瀏覽量
11503 -
有限狀態機
+關注
關注
0文章
52瀏覽量
10357 -
狀態機
+關注
關注
2文章
492瀏覽量
27574
發布評論請先 登錄
相關推薦
SaberRD狀態機建模工具介紹(二)狀態機建模工具使用示例
有限狀態機的建模與優化設計
用狀態機原理進行軟件設計
如何對狀態機的程序進行靈活修改


什么是狀態機?狀態機5要素
自動生成程序狀態機代碼狀態機建模方法
如何生成狀態機框架





 工商網監
工商網監
評論