 SaberRD設計示例:汽車液壓減震系統設計
SaberRD設計示例:汽車液壓減震系統設計
介紹
本示例是一個簡單的液壓減振器系統的分層設計,利用這個設計用戶可以模擬車身垂直運動的變化,如道路上的凹凸不平或坑洼,同時還可以獨立仿真每個車輪變化的靈活性。這里要說的是,該系統的設計假設車輛或汽車的重量分布均勻。
設計實例使用了SaberRD的一些較新功能,如設計變量、實驗編輯器和故障分析器。由于要運行故障分析,因此需要具有故障分析器FAULT的license許可。
電路說明
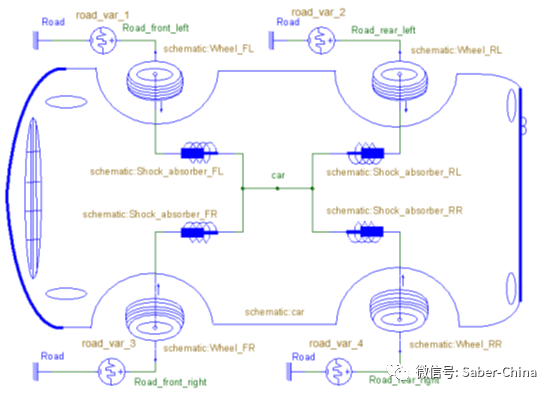
從上圖中可以看出,設計包括了每個車輪(如schematic:Wheel_FL)和每個減震器單元(如schematic:Shock_Wheel_FL的單獨分層示意圖。分層級別提供了為每個車輪和減震器單元獨立設置值的靈活性,因此可以模擬更真實的條件。
為便于說明,所有車輪和減震器單元均被視為具有相同的設置。與車輪和減震器單元的數量類似,單獨的pos_pwl.sin 模型用于單獨饋送道路變化。讓我們假設所有四個車輪的道路變化都相同,如下所示。

此設計示例中實現的重要功能之一是用戶可以自由選擇車輛行駛的速度和距離。用戶可以使用設計變量在設計的頂層將這些值設置為常量。本例中使用的設計變量是“speed”、“dist_travel”和“t”。
實現此功能的主要優點是可以輕松計算后輪的時間延遲。眾所周知,根據車輛的速度,后輪和前輪之間會有時間延遲,要研究車輛上的垂直運動的整體變化,這個時間延遲的因素是很重要的。
為此,引入了另外兩個設計變量,即 base(前輪中心和后輪中心之間的距離)和 td(時間延遲),并且在兩個后輪上都添加了td來模擬延遲。變量t 和td使用下面給出的等式計算。
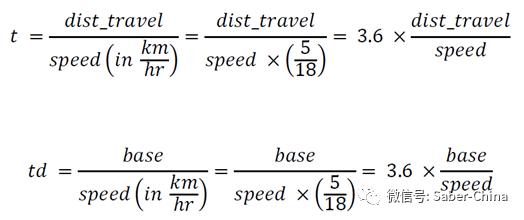
在這個示例中,車輛的速度設置為 10(以公里/小時為單位),base 設置為 1m,dist_travel 設置為 1m。
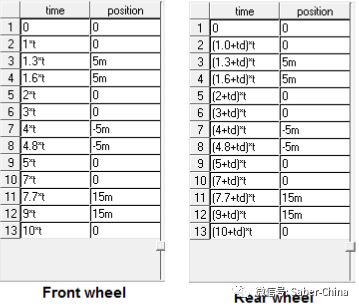
時間變量 t 和 td 分別用于計算連接到前輪和后輪的 pwl 源的 x 軸。下面給出了 pwl 源的 x(時間)和 y(位置)坐標。
安裝與使用:
1.下載shock_absorber.zip并解壓縮到本地光盤。
2.打開設計文件“shock_demo_1.ai_dsn”。
3.根據下面的仿真設置執行分析,并繪制列出的信號以了解設計的行為。
仿真設置:
結束時間:5
步長:1m
注意:如果比率,則趨向增加,同樣如果比率 ,那么趨向必須減少以獲得更好的結果。
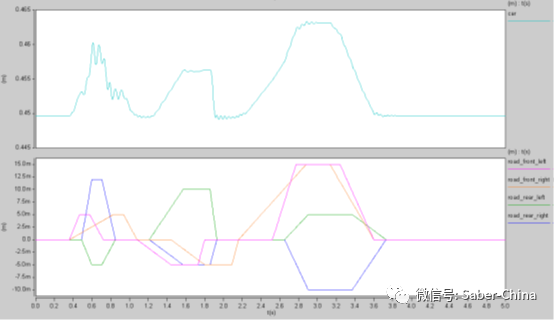
仿真結果:
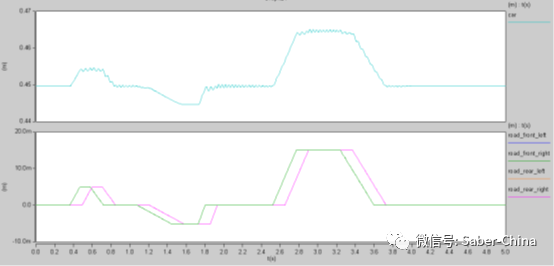
繪制四個車輪road_front_left、road_front_right、road_rear_left、road_rear_right的波形并相互附加。在繪制整車波形并檢查對車輛的影響,見下所示。
1.測試速度的變化。
1.1 轉到實驗選項卡并打開實驗“speed_alter_test”。
1.2 在實驗中,首先進行瞬態分析 (tr1),速度等于10公里/小時,然后速度更改為 20公里/小時。然后使用更改的速度值進行第二次瞬態分析 (tr2)。信號按進行的瞬態分析的順序繪制。
1.3 運行模擬并查看結果,如下所示。

2.減震器單元故障測試
為了能說明問題,對左前減震器單元進行了測試。現在考慮了三個故障,如螺旋彈簧失去剛度(故障ID:F1)、液壓失去位置(故障ID:F2)和螺旋彈簧失去位置(故障ID:F3)。
2.1 轉到實驗選項卡并打開實驗“fault_shock”。
2.2 實驗中增加故障分析。如果您將鼠標懸停在故障選項卡上,您可以看到帶有相應 ID 的故障。
2.3 運行仿真。
2.4 車身垂直運動的變化如下所示。

2.5信號“car_with_fault”具有三個波形。在信號上單擊鼠標右鍵并選擇“成員屬性”。現在您可以分別選擇每個故障。

3.假設每個車輪的道路變化不同,測試每個減震器單元。
3.1 開放式設計shock_demo_2.ai_dsn
3.2 打開實驗“alter_4_test”并運行仿真
3.3 得到的結果如下
-
仿真器
+關注
關注
14文章
1018瀏覽量
83746 -
汽車減震器
+關注
關注
0文章
5瀏覽量
6006
發布評論請先 登錄
相關推薦

AMT液壓系統仿真及其應用
汽車新型液壓離合器液壓操縱系統性能測試系統詳解
基于TMS320VC5409的汽車減震彈簧故障診斷系統
汽車減震彈簧故障診斷儀的設計方案解析
基于檢測減震器的智能車輛檢測系統
液壓系統的組成及優缺點_液壓系統的維護
基于ABS轉速檢測傳感器實現汽車減震檢測系統的設計





 工商網監
工商網監
評論