") 深入淺出地講解經(jīng)典軸承故障數(shù)據(jù)集
深入淺出地講解經(jīng)典軸承故障數(shù)據(jù)集
1 數(shù)據(jù)集解讀
1.1 振動(dòng)信號(hào)數(shù)據(jù)通常以時(shí)域顯示
在軸承故障數(shù)據(jù)集振動(dòng)信號(hào)的時(shí)域表示中,通常將時(shí)間作為橫軸,振動(dòng)信號(hào)的幅值作為縱軸。具體來(lái)說(shuō):
- 橫軸(X軸)代表時(shí)間: 時(shí)間是指振動(dòng)信號(hào)采集的時(shí)刻或時(shí)間序列中的時(shí)間點(diǎn)。它表示了信號(hào)采集的順序和時(shí)間間隔。橫軸上的單位通常是秒(s)或毫秒(ms),取決于信號(hào)采集的頻率和持續(xù)時(shí)間。
- 縱軸(Y軸)代表振動(dòng)信號(hào)的幅值: 振動(dòng)信號(hào)的幅值表示了在特定時(shí)間點(diǎn)或時(shí)間段內(nèi)的振動(dòng)強(qiáng)度或振幅。它反映了振動(dòng)信號(hào)的能量或振幅大小。在軸承故障數(shù)據(jù)集中,縱軸(Y軸)代表的是軸承的振動(dòng)信號(hào)的幅值,以加速度(Acceleration)作為單位。縱軸上的數(shù)值表示軸承在特定時(shí)間點(diǎn)或時(shí)間段內(nèi)的振動(dòng)加速度值。
振動(dòng)加速度是指物體在振動(dòng)過(guò)程中的加速度變化,它是描述振動(dòng)強(qiáng)度和振動(dòng)頻率的重要指標(biāo)之一。在軸承故障數(shù)據(jù)集中,通過(guò)對(duì)軸承進(jìn)行傳感器測(cè)量,可以獲取到軸承在運(yùn)行過(guò)程中產(chǎn)生的振動(dòng)信號(hào),其幅值通過(guò)加速度來(lái)表示。
通過(guò)時(shí)域顯示,我們可以觀察到振動(dòng)信號(hào)隨時(shí)間的變化情況,包括振動(dòng)的周期性、幅值的變化、脈沖或波形的形狀等。這有助于分析信號(hào)中的特征、頻率成分、周期性或隨機(jī)性等,并對(duì)振動(dòng)信號(hào)的特征進(jìn)行故障診斷、頻譜分析、波形分析等進(jìn)一步處理和解釋。
1.2 凱斯西儲(chǔ)大學(xué)軸承數(shù)據(jù)集 描述的是什么數(shù)據(jù)?
該數(shù)據(jù)集是一個(gè)常用的軸承故障數(shù)據(jù)集,用于故障診斷和預(yù)測(cè)的研究。該數(shù)據(jù)集包含了來(lái)自不同故障模式和工作條件下的軸承振動(dòng)數(shù)據(jù)。
數(shù)據(jù)集描述的是在旋轉(zhuǎn)機(jī)械系統(tǒng)中使用的軸承的振動(dòng)信號(hào)數(shù)據(jù)。軸承是旋轉(zhuǎn)機(jī)械中的重要組件,常常承受著高速和高負(fù)荷的工作環(huán)境,因此容易發(fā)生故障。自身內(nèi)部的缺陷有很多種像在加工生產(chǎn)時(shí)產(chǎn)生的或者在組裝過(guò)程中導(dǎo)致的形變,外部環(huán)境所導(dǎo)致的故障也有很多種例如變形、磨損、裂變等。通過(guò)監(jiān)測(cè)軸承的振動(dòng)信號(hào),可以獲得關(guān)于軸承運(yùn)行狀態(tài)的信息,進(jìn)而進(jìn)行故障診斷和預(yù)測(cè)。
1.3 實(shí)驗(yàn)平臺(tái)介紹
該實(shí)驗(yàn)臺(tái)如圖所示,其組成為:
- 一個(gè)1.5KW(2馬力)的電動(dòng)機(jī)(圖左側(cè));
- 一個(gè)扭矩傳感器/ 譯碼器(圖中間連接處);
- 一個(gè)功率測(cè)試計(jì)(圖右側(cè));
- 電子控制器(圖中沒(méi)顯示) 。
待測(cè)軸承:
- 基座數(shù)據(jù)
- 電機(jī)驅(qū)動(dòng)端
- 電機(jī)風(fēng)扇端
1.4 以上三個(gè)不同位置的振動(dòng)數(shù)據(jù)的區(qū)別解讀
通過(guò)在電機(jī)殼體的 驅(qū)動(dòng)端 、風(fēng)扇端和基座上放置加速度計(jì),可以獲取到三個(gè)不同位置的振動(dòng)數(shù)據(jù)。這些數(shù)據(jù)的區(qū)別在于它們所測(cè)量的振動(dòng)信號(hào)反映的是不同的物理現(xiàn)象和特征,因而可以提供不同的信息用于故障診斷和監(jiān)測(cè)。
- 驅(qū)動(dòng)端數(shù)據(jù): 位于電機(jī)殼體的驅(qū)動(dòng)端的加速度計(jì)測(cè)量的是電機(jī)驅(qū)動(dòng)端的振動(dòng)信號(hào)。這個(gè)位置上的振動(dòng)信號(hào)主要受到電機(jī)轉(zhuǎn)子的旋轉(zhuǎn)和傳動(dòng)系統(tǒng)的激勵(lì)影響,因此可以提供關(guān)于電機(jī)傳動(dòng)系統(tǒng)和驅(qū)動(dòng)端的故障信息,例如軸承故障、齒輪嚙合故障等。
- 風(fēng)扇端數(shù)據(jù): 位于電機(jī)殼體的風(fēng)扇端的加速度計(jì)測(cè)量的是電機(jī)風(fēng)扇端的振動(dòng)信號(hào)。這個(gè)位置上的振動(dòng)信號(hào)主要受到風(fēng)扇葉片的旋轉(zhuǎn)和風(fēng)扇系統(tǒng)的激勵(lì)影響,因此可以提供關(guān)于風(fēng)扇系統(tǒng)的故障信息,例如風(fēng)扇葉片失衡、風(fēng)扇軸承故障等。
- 基座數(shù)據(jù): 位于電機(jī)底座的加速度計(jì)測(cè)量的是整個(gè)電機(jī)系統(tǒng)的振動(dòng)信號(hào)。這個(gè)位置上的振動(dòng)信號(hào)受到電機(jī)整體結(jié)構(gòu)和運(yùn)行狀態(tài)的影響,可以提供關(guān)于整個(gè)電機(jī)系統(tǒng)的故障信息,例如電機(jī)不平衡、底座松動(dòng)等。
因此,通過(guò)收集不同位置上的振動(dòng)數(shù)據(jù),可以綜合分析不同位置所提供的故障特征,從而更全面地了解電機(jī)系統(tǒng)的健康狀況和故障狀態(tài)。這有助于提高故障檢測(cè)的準(zhǔn)確性和針對(duì)性,以便及時(shí)采取適當(dāng)?shù)木S護(hù)和修復(fù)措施。
1.4 官網(wǎng)數(shù)據(jù)集介紹
這是西儲(chǔ)大學(xué)軸承數(shù)據(jù)中心網(wǎng)頁(yè)下載數(shù)據(jù)的界面

- DE - 驅(qū)動(dòng)端加速度計(jì)數(shù)據(jù)
- FE - 風(fēng)扇端加速度計(jì)數(shù)據(jù)
- BA - 基座加速度計(jì)數(shù)據(jù)
- time - 時(shí)間序列數(shù)據(jù)
- RPM - rpm during testing 轉(zhuǎn)每分鐘
第一個(gè)數(shù)據(jù)集:正常基線數(shù)據(jù)

Motor Load (HP) 的中文意思是電機(jī)負(fù)載(馬力)。它表示施加在電動(dòng)機(jī)上的功率或負(fù)載,通常以馬力(HP)為單位進(jìn)行衡量。它代表電機(jī)所執(zhí)行的工作量或所生成的功率。在0、1、2和3馬力的電機(jī)負(fù)載工況工作條件下記錄振動(dòng)加速度信號(hào)數(shù)據(jù)。
Motor Speed (rpm):近似電機(jī)轉(zhuǎn)速(rpm)
在不同負(fù)載和轉(zhuǎn)速下一共有四組正常的數(shù)據(jù),數(shù)據(jù)文件為Matlab格式。用Python讀取第一個(gè)數(shù)據(jù)集結(jié)果如下:
data=loadmat('97_0.mat')
data
{'__header__': b'MATLAB 5.0 MAT-file, Platform: PCWIN, Created on: Mon Jan 31 15:28:20 2000',
'__version__': '1.0',
'__globals__': [],
'X097_DE_time': array([[ 0.05319692], [ 0.08866154], [ 0.09971815], ..., [-0.03463015], [ 0.01668923], [ 0.04693846]]),
'X097_FE_time': array([[0.14566727], [0.09779636], [0.05485636], ..., [0.14053091], [0.09553636], [0.09019455]]),
'X097RPM': array([[1796]], dtype=uint16)}
數(shù)據(jù)為字典格式,包括了創(chuàng)建版本信息、驅(qū)動(dòng)端、風(fēng)扇端、RPM轉(zhuǎn)速信息等
**第二個(gè)數(shù)據(jù)集:**12k 驅(qū)動(dòng)端軸承故障數(shù)據(jù)
采樣頻率為12 kHz,數(shù)據(jù)收集在12,000次/秒。

故障直徑(Fault Diameter):指軸承或其他機(jī)械部件上出現(xiàn)的故障或損傷的直徑尺寸。故障直徑通常用來(lái)描述故障的大小和程度,對(duì)于故障診斷和預(yù)測(cè)維護(hù)非常重要。單位為英寸,1英寸=25.4mm
- 0.007英寸=7 mils =0.177 8 mm
- 0.014英寸=14 mils =0.355 6 mm
- 0.021英寸=21 mils =0.533 4 mm
- 0.028英寸=28 mils =1.016 mm
Motor Load (HP)電機(jī)負(fù)載和Motor Speed (rpm)電機(jī)轉(zhuǎn)速同上。

在軸承中,"Inner Race"(內(nèi)圈)、"Ball"(滾珠)和"Outer Race"(外圈)是三個(gè)重要的組成部分,它們一起構(gòu)成了軸承的基本結(jié)構(gòu)。下面是它們的具體含
- Inner Race(內(nèi)圈):內(nèi)圈是軸承的一個(gè)環(huán)狀部件,通常位于滾珠或滾子之內(nèi),與軸相配合。內(nèi)圈通過(guò)與滾動(dòng)體接觸,在軸上旋轉(zhuǎn),承受和傳遞軸向和徑向負(fù)荷。
- Ball(滾珠):滾珠是軸承中的滾動(dòng)體,它們通常是小球狀的物體,可以在內(nèi)圈和外圈之間滾動(dòng)。滾珠在軸承中起到支撐和傳遞負(fù)荷的作用,減少摩擦和滑動(dòng)。
- Outer Race(外圈):外圈是軸承的另一個(gè)環(huán)狀部件,位于滾珠或滾子的外部。外圈與內(nèi)圈和滾珠配合,提供軸承的外部支撐和固定。
這三個(gè)部分共同工作,形成了軸承的基本結(jié)構(gòu),以支撐和傳遞軸上的負(fù)荷,減少摩擦,并使軸承能夠平穩(wěn)運(yùn)轉(zhuǎn)。它們的材料和設(shè)計(jì)會(huì)根據(jù)不同的應(yīng)用和軸承類(lèi)型而有所差異,以滿足特定的負(fù)荷和工作環(huán)境要求。
驅(qū)動(dòng)端和風(fēng)扇端軸承外圈的損傷點(diǎn)分別放置在3點(diǎn)鐘、6點(diǎn)鐘、12點(diǎn)鐘三個(gè)不同位置。所以外圈的損傷有三個(gè)數(shù)據(jù)集。
用Python讀取第一個(gè)數(shù)據(jù)集IR007_0結(jié)果如下:
data = loadmat('105.mat')
data
{'__header__': b'MATLAB 5.0 MAT-file, Platform: PCWIN, Created on: Mon Jan 31 13:49:59 2000',
'__version__': '1.0',
'__globals__': [],
'X105_DE_time': array([[-0.08300435], [-0.19573433], [ 0.23341928], ..., [-0.31642363], [-0.06367457], [ 0.26736822]]), 'X105_FE_time': array([[-0.40207455], [-0.00472545], [-0.10663091], ..., [ 0.31598909], [ 0.35091636], [ 0.03307818]]),
'X105_BA_time': array([[ 0.06466148], [-0.02309626], [-0.08852226], ..., [ 0.09648926], [ 0.08405591], [-0.02015893]]),
'X105RPM': array([[1797]], dtype=uint16)}
數(shù)據(jù)為字典格式,包括了創(chuàng)建版本信息、驅(qū)動(dòng)端、風(fēng)扇端、基座RPM轉(zhuǎn)速信息等
查看一下驅(qū)動(dòng)端數(shù)據(jù)條數(shù)
data1['X105_DE_time'].shape
(121265, 1)
將近12萬(wàn)條,也就是采集了近10秒的數(shù)據(jù)
第三個(gè)數(shù)據(jù)集:48k 驅(qū)動(dòng)端軸承故障數(shù)據(jù)
驅(qū)動(dòng)端軸承故障還包含采樣頻率為48 kHz 的數(shù)據(jù),數(shù)據(jù)收集在
48,000次/秒。

其分析同上。區(qū)別是采樣頻率不同,故障直徑(Fault Diameter)少一種。
第四個(gè)數(shù)據(jù)集:風(fēng)****扇端軸承故障數(shù)據(jù)
風(fēng)扇端采樣頻率為12 kHz 的數(shù)據(jù),數(shù)據(jù)收集在12,000次/秒。

其分析同上。區(qū)別是對(duì)象和采樣頻率不同,故障直徑(Fault Diameter)也少一種。
上述四種數(shù)據(jù)集下載后如下

2 數(shù)據(jù)集分類(lèi)與制作
2.1 數(shù)據(jù)集分類(lèi)解讀
凱斯西儲(chǔ)大學(xué)軸承數(shù)據(jù)集包含了以上四種不同故障模式的振動(dòng)數(shù)據(jù),包括內(nèi)圈故障、外圈故障、滾動(dòng)體故障。數(shù)據(jù)集提供了不同工作條件下的實(shí)驗(yàn)數(shù)據(jù),包括不同轉(zhuǎn)速、載荷和工作時(shí)間等參數(shù)。每個(gè)故障模式都有多個(gè)不同工況的樣本,按照不同條件約束,其分類(lèi)形式有多種。
當(dāng)然,如果需要處理這些數(shù)據(jù),來(lái)進(jìn)行故障診斷和分類(lèi)任務(wù),并不是需要網(wǎng)站中的所有數(shù)據(jù),可以只選擇我們需要的,比如選擇驅(qū)動(dòng)端+0HP的故障數(shù)據(jù)。
以 12k Drive End Bearing Fault Data 舉例說(shuō)明:
首先,有四種故障類(lèi)型 ,只取前三種,因?yàn)?.028沒(méi)有外圈故障。

其次,比如0.007文件,只取前三類(lèi),因?yàn)榈谌N負(fù)載 和第四種負(fù)載差不多。

最后 ,外圈故障 只取Outer Race _6,即6點(diǎn)鐘的數(shù)據(jù)集,因?yàn)槊總€(gè)文件都有,而且數(shù)據(jù)差別也不大。
綜上:三種直徑數(shù)據(jù)和三種故障數(shù)據(jù),所以每個(gè)工況共有3*3+1(正常數(shù)據(jù))=10種數(shù)據(jù)。所以根據(jù)工況的不同可以把數(shù)據(jù)分為A、B、C三種。每個(gè)工況有10種數(shù)據(jù)。如下:
- 正常0hp 為一類(lèi)
- 0.007 0hp 內(nèi)圈 滾珠 外圈
- 0.014 0hp 內(nèi)圈 滾珠 外圈
- 0.021 0hp 內(nèi)圈 滾珠 外圈
2.2 數(shù)據(jù)集處理與制作
第一步,數(shù)據(jù)讀取:
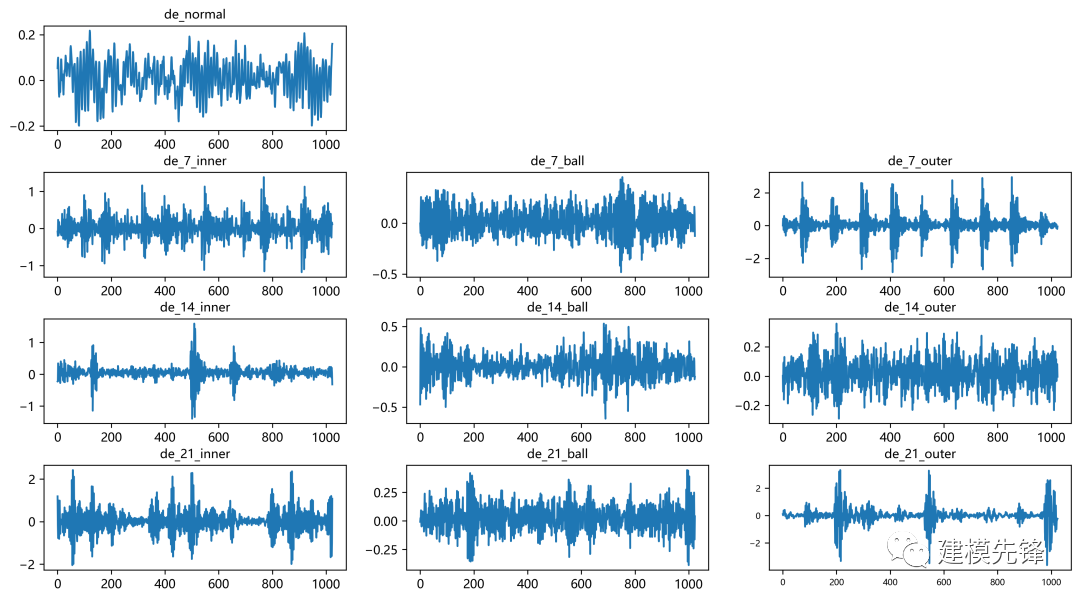
十類(lèi)數(shù)據(jù)集,每類(lèi)數(shù)據(jù)集中只獲取DE_time數(shù)據(jù),Python讀取數(shù)據(jù)如下所示:
# 采用驅(qū)動(dòng)端數(shù)據(jù)
data_columns = ['X097_DE_time', 'X105_DE_time', 'X118_DE_time', 'X130_DE_time', 'X169_DE_time',
'X185_DE_time','X197_DE_time','X209_DE_time','X222_DE_time','X234_DE_time']
columns_name = ['de_normal','de_7_inner','de_7_ball','de_7_outer','de_14_inner','de_14_ball','de_14_outer','de_21_inner','de_21_ball','de_21_outer']
data_12k_1797_10c = pd.DataFrame()
for index in range(10):
# 讀取MAT文件
data = loadmat(f'E:codeingVscodeProjectsDeepLearning故障診斷data_deal_1797{file_names[index]}')
dataList = data[data_columns[index]].reshape(-1)
data_12k_1797[columns_name[index]] = dataList[:119808] # 121048 min: 121265
print(data_12k_1797_10c.shape)
data_12k_1797_10c
把數(shù)據(jù)生成后放在一張表格里(矩陣形式)10列不同分類(lèi)故障數(shù)據(jù)標(biāo)簽,一共將近12萬(wàn)行數(shù)據(jù),如下圖所示

然后保存為CSV形式,以便后續(xù)處理。
data_12k_1797.set_index('de_normal',inplace=True)
data_12k_1797.to_csv('data_12k_1797_10c.csv')
對(duì)10分類(lèi)數(shù)據(jù)時(shí)序圖數(shù)據(jù)可視化,二維圖像辨識(shí)度比較高。
第二步,制作數(shù)據(jù)集:
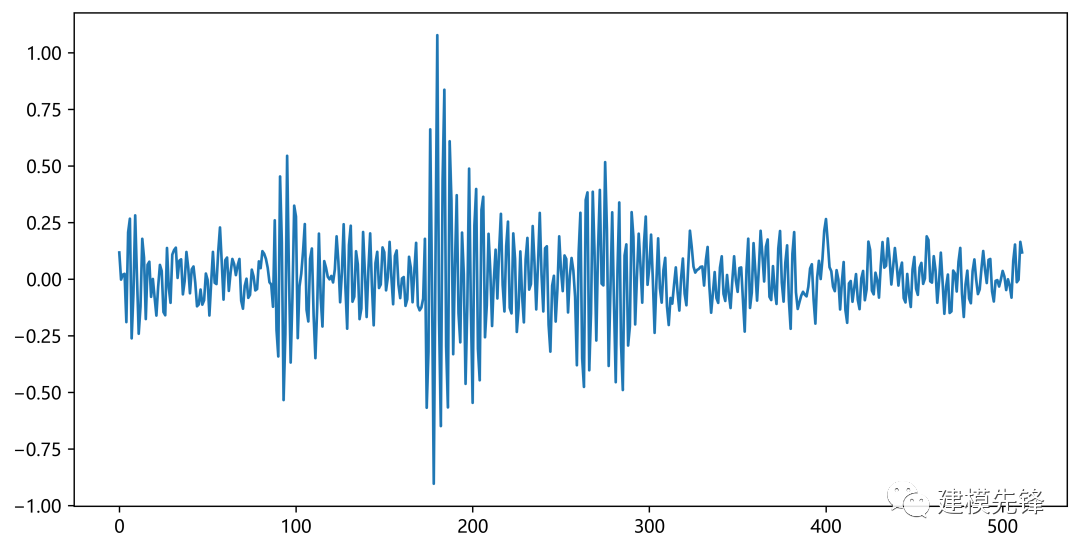
數(shù)據(jù)集的切分方式也多種多樣,切分步長(zhǎng)也具有多樣性,下面按照固定的參數(shù)設(shè)置進(jìn)行數(shù)據(jù)的切分:
- 步長(zhǎng) window_step:512 (每個(gè)樣本長(zhǎng)度為512個(gè)點(diǎn))
- 重疊率 overlap_ratio:0.5(切分相鄰兩個(gè)樣本重疊率)
怎么理解重疊率呢?舉例如下:

切分樣本點(diǎn)后,按照7:2:1劃分訓(xùn)練集、驗(yàn)證集、測(cè)試集,最后保存數(shù)據(jù):

3 基于Python的故障診斷和分類(lèi)的研究思路
3.1 關(guān)于軸承故障類(lèi)型分類(lèi)的方法探討
第一類(lèi)是對(duì)一維故障數(shù)據(jù)進(jìn)行分類(lèi)
- 一是直接對(duì)一維故障數(shù)據(jù),添加分類(lèi)標(biāo)簽進(jìn)行處理,送進(jìn)CNN、LSTM等網(wǎng)絡(luò)進(jìn)行分類(lèi);
- 二是先對(duì)一維故障數(shù)據(jù)做一些處理或者去噪,然后再進(jìn)行分類(lèi);
第二類(lèi)是把一維故障數(shù)據(jù)轉(zhuǎn)換為圖像進(jìn)行分類(lèi)
- 一是轉(zhuǎn)換為二維時(shí)序圖進(jìn)行分類(lèi);
- 二是轉(zhuǎn)換為時(shí)頻圖像進(jìn)行分類(lèi);
- 三是基于格拉姆角場(chǎng)(GAF)轉(zhuǎn)換為二維圖像進(jìn)行分類(lèi);
3.2 重點(diǎn)介紹關(guān)于軸承故障數(shù)據(jù)時(shí)頻圖像分類(lèi)的方法
滾動(dòng)軸承發(fā)生故障時(shí),其振動(dòng)信號(hào)往往具有非線性、非平穩(wěn)性特點(diǎn)。相比傳統(tǒng)的時(shí)域和頻域分析方法,在處理非線性、非平穩(wěn)信號(hào)時(shí),時(shí)頻分析方法更加有效。
時(shí)頻分析方法采用時(shí)域和頻域的二維聯(lián)合表示,可以實(shí)現(xiàn)非平穩(wěn)信號(hào)局部特性的精確描 述,具有時(shí)域和頻域等傳統(tǒng)方法無(wú)法比擬的優(yōu)勢(shì),已經(jīng)被廣泛地應(yīng)用于機(jī)械故障診斷領(lǐng)域。
常用的時(shí)頻分析方法有:
- 傅里葉變換(Fourier Transform,F(xiàn)T)
- 短時(shí)傅里葉變換(Short Time Fourier Transform,STFT)
- 小波變換(Wavelet Transform,WT)
- 連續(xù)小波變換(CWT)
下面以連續(xù)小波變換(CWT)作為軸承故障數(shù)據(jù)的處理方法進(jìn)行講解:
第一步,Python中連續(xù)小波變換(CWT)介紹
導(dǎo)入相關(guān)包,pywt 用于小波變換
import numpy as np
import matplotlib.pyplot as plt
import pywt
import pandas as pd
加載軸承數(shù)據(jù)集 驅(qū)動(dòng)端故障數(shù)據(jù)
data3 = loadmat(r'21_2.mat')
data_list3 = data3['X222_DE_time'].reshape(-1)
data = data_list3[0:512]
設(shè)置連續(xù)小波變換參數(shù) 設(shè)置采樣周期為 1/12000,總尺度為 128,小波基函數(shù)選擇 'cmor1-1'
sampling_period =1.0/12000
totalscal = 128
wavename = 'cmor1-1'
計(jì)算小波基函數(shù)的中心頻率 fc
fc = pywt.central_frequency(wavename)
然后根據(jù) totalscal 計(jì)算參數(shù) cparam
cparam = 2 * fc * totalscal
通過(guò)除以 np.arange(totalscal, 0, -1) 來(lái)生成一系列尺度值,并存儲(chǔ)在 scales 中
scales = cparam / np.arange(totalscal, 0, -1)

生成時(shí)頻圖

第二步,生成時(shí)頻圖像數(shù)據(jù)集

如圖所示為生成的圖像數(shù)據(jù)集

第三步, 定義數(shù)據(jù)加載器和VGG網(wǎng)絡(luò)模型
制作數(shù)據(jù)標(biāo)簽,保存數(shù)據(jù)

定義VGG網(wǎng)絡(luò)模型

第三步,設(shè)置參數(shù),訓(xùn)練模型
30個(gè)epoch,準(zhǔn)確率將近90%,繼續(xù)調(diào)參可以進(jìn)一步提高分類(lèi)準(zhǔn)確率

-
電機(jī)驅(qū)動(dòng)
+關(guān)注
關(guān)注
60文章
1219瀏覽量
86844 -
軸承
+關(guān)注
關(guān)注
4文章
2127瀏覽量
31265 -
python
+關(guān)注
關(guān)注
56文章
4801瀏覽量
84882 -
傅里葉變換
+關(guān)注
關(guān)注
6文章
442瀏覽量
42653 -
扭矩傳感器
+關(guān)注
關(guān)注
3文章
107瀏覽量
14583
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
深入淺出LabVIEW數(shù)據(jù)庫(kù)應(yīng)用.pdf
深入淺出Android—Android開(kāi)發(fā)經(jīng)典教材





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論