

隨著低功耗藍牙(BLE)技術的不斷發展,藍牙定位的測距算法也越來越多,比如RSSI(接收信號強度指示)、AoA(到達角)、AoD(出發角)、ToA (到達時間)、TDoA(到達時間差)、ToF(飛行時間)等。不同測距算法的實現難度、功耗及精度不一樣,大家可以根據自己的預算及精度要求選擇相應的測距算法。在眾多測距算法中,RSSI是最具性價比的,其具有功耗低、成本低、使用簡單的優勢。本文將介紹RSSI定位系統的原理。
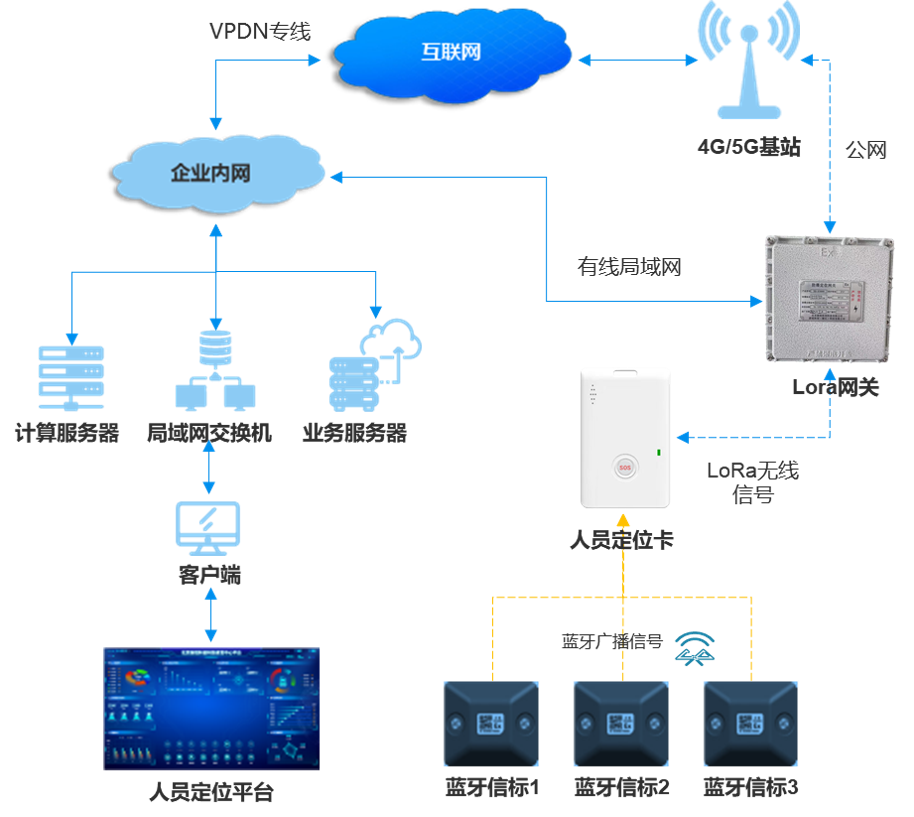
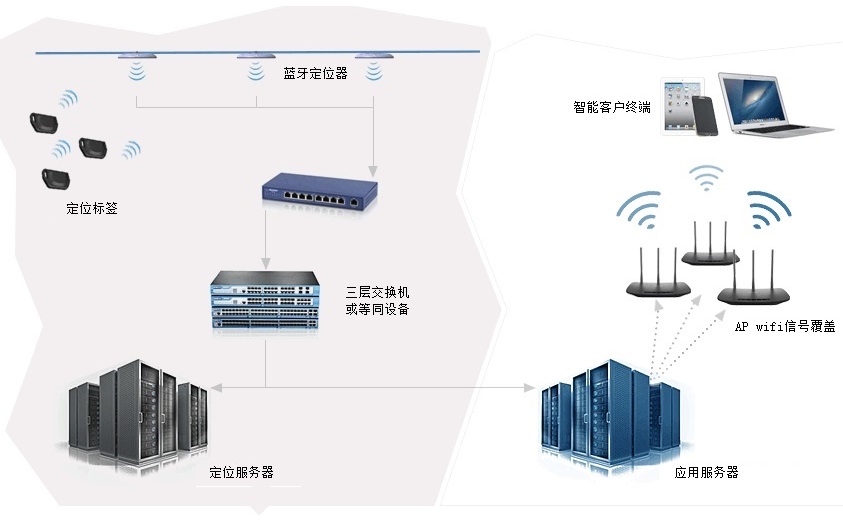
RSSI是Received Signal Strength Indication的簡稱,是接收的信號強度指示,無線發送層的可選部分,用來判定連接質量以及是否增大廣播發送強度。通過接收到的信號強弱測定信號點與接收點的距離,進而根據相應數據進行定位計算的一種定位技術。 藍牙RSSI定位是指基于藍牙4.0以上協議,利用藍牙RSSI信號衰減與距離之間的相關性關系來計算出藍牙終端所在位置的一種定位方式。在實際應用過程中,發射端通常為藍牙信標,接收端通常為智能手機。
藍牙設備在廣播中,信號接收端離發射端越遠,接收到的RSSI場強值就越弱;信號接收端離發射端越近,接收到的RSSI場強值就越強。接收端收到的無線信號dBm一般都是負值,信號值越大代表信號越強,RSSI信號范圍在0~-100之間,0是理想情況,在實際應用中并不存在。
根據不同的應用要求,藍牙定位一般可分為存在性檢測定位和三角精準定位。存在性定位通常應用于巡更考勤,一個發射端和一個接收端即可完成應用,即可證明存在于某個區域,應用原理簡單;接下來重點介紹下RSSI三角定位原理。
三角定位原理:發射端的位置是固定的,比如一個區域有3個 發射端,也即鋪設了三個藍牙信標,BS1(x1,y1),BS2(x2,y2)以及BS3(x3,y3)。
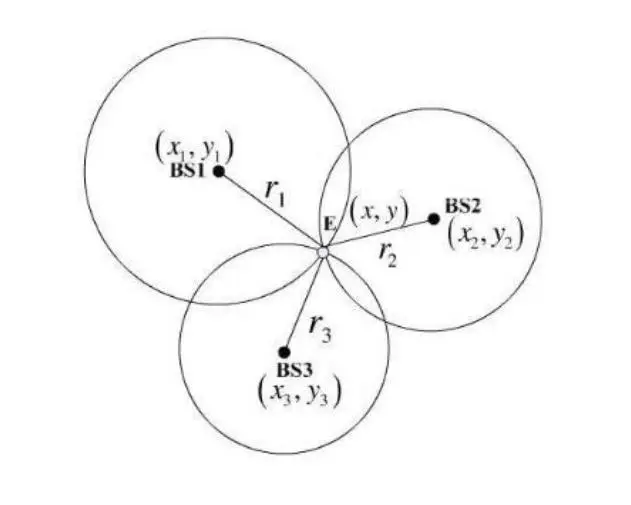
如圖:E點接收 BS1、BS2、BS3發出的信號,獲取到不同點位的RSSI,三角定位算法通過已知的三個坐標反推出E點的坐標。
三個發射端(BS1,BS2,BS3)的坐標是固定的,利用三點定位原理即可近似計算出接收端所在的位置,也即發射端信號向外360度擴散形成球面的交點,進而計算出E(x,y)所在的位置;
在實際應用中算法可不只如此簡單,還要考慮到不同環境的不同衰減因子,以及利用濾波算法過濾信號的干擾,讓定位點更加平穩。在有些定位算法中,還會加入慣導算法。即便如此,利用藍牙RSSI場強計算出的位置仍是近似位置。
-
定位
+關注
關注
5文章
1375瀏覽量
35726 -
RSSI
+關注
關注
2文章
96瀏覽量
28062 -
藍牙信標
+關注
關注
1文章
64瀏覽量
6429
發布評論請先 登錄
相關推薦
藍牙AOA定位的優勢有哪些
藍牙信標人員定位系統 Soc藍牙5.2低功耗芯片PHY6252
主動式藍牙RSSI定位系統和被動式藍牙RSSI定位系統的原理
藍牙定位的三種技術:RSSI、AoA/AoD、CS定位

防爆定位信標與防爆定位基站有什么區別?
藍牙信標為什么成了眾多企業必要的設備?
防爆定位信標的適用范圍與方法?防爆定位信標的優勢在哪

防爆定位信標有哪些功能?防爆定位信標適用于哪些位置?

室內藍牙導航定位技術獨特的優勢
藍牙定位:藍牙定位技術有什么用?
藍牙定位技術在智慧養老中的應用
藍牙信標室內定位算法如何確定 A,n 值

正在推進的藍牙CS定位規范,能馬上大展拳腳嗎?






 工商網監
工商網監

評論