 卡爾曼濾波算法的基本原理
卡爾曼濾波算法的基本原理
卡爾曼濾波(Kalman Filter)是一種遞歸的、自適應的濾波算法,廣泛應用于估計系統狀態和觀測過程中的噪聲。它最初在1960年被提出,被認為是控制理論和信號處理領域中最重要的發展之一。卡爾曼濾波器在許多領域,包括導航、機器人、金融和通信系統中都有廣泛的應用。
1,基本原理:
卡爾曼濾波器的核心思想是融合系統的動態模型和實際的觀測數據,通過對過程和測量噪聲的估計,提供對系統狀態的最優估計。其基本原理可以分為兩個步驟:預測(Predict)和更新(Update)。
預測(Predict):
在預測階段,卡爾曼濾波器使用系統的動態模型,以及先前的狀態估計來預測系統的下一個狀態。這一過程基于系統的狀態方程和控制輸入,考慮系統的動態演變。預測的結果是對系統狀態的先驗估計,其中考慮了系統的動態行為。卡爾曼濾波的狀態方程通常表示為:
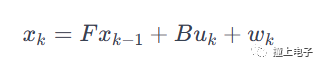
其中,Xk是系統狀態向量,F 是狀態轉移矩陣,B 是輸入矩陣,Uk是控制輸入向量,Wk是過程噪聲。
更新(Update):
在更新階段,卡爾曼濾波器使用實際的測量數據來校正先前的狀態估計。這一過程基于測量方程和測量噪聲,考慮了觀測到的系統輸出。更新的結果是對系統狀態的后驗估計,其中融合了測量信息。
卡爾曼濾波的測量方程通常表示為:
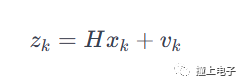
其中,Zk是測量向量,H是測量矩陣,Vk測量噪聲。
2,狀態估計的迭代過程:
卡爾曼濾波是一個迭代的過程,其更新步驟依賴于預測和測量的相互作用。以下是卡爾曼濾波的迭代過程:
初始化: 首先,需要初始化卡爾曼濾波器的狀態估計(X0)和協方差矩陣(P0)
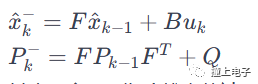
預測: 使用系統的狀態方程進行狀態的預測,并更新狀態的協方差矩陣。這一步考慮了系統的動態演變和過程噪聲。其中,Xk是先驗狀態估計,Pk是先驗協方差矩陣,Q是過程噪聲協方差矩陣。
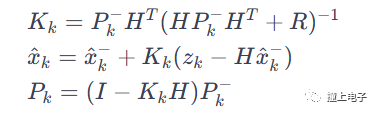
測量更新: 使用測量方程將預測的狀態與實際的測量數據進行比較,從而校正狀態估計,并更新協方差矩陣。這一步考慮了觀測到的系統輸出和測量噪聲。其中,Kk 是卡爾曼增益,R是測量噪聲協方差矩陣,Xk 是后驗狀態估計,Pk 是后驗協方差矩陣。
重復: 重復預測和測量更新步驟,將后驗狀態估計作為下一步的先驗狀態估計,持續迭代。
3,關鍵概念:
卡爾曼增益: 卡爾曼增益是一個關鍵的概念,它決定了預測和測量更新之間的相對權重。卡爾曼增益越大,系統對測量數據的依賴性越強,反之亦然。
協方差矩陣: 協方差矩陣描述了狀態估計的不確定性。通過在迭代過程中更新協方差矩陣,卡爾曼濾波器能夠動態調整對狀態估計的信任程度。
過程噪聲和測量噪聲: 過程噪聲和測量噪聲是卡爾曼濾波中的兩個關鍵參數,它們用于描述系統動態模型和測量過程中的不確定性。適當估計和調整這些噪聲是卡爾曼濾波器性能的關鍵。
4,示例代碼:
#include < stdio.h >
// 定義狀態向量的維度
#define STATE_DIM 2
// 定義測量向量的維度
#define MEASURE_DIM 1
// 定義卡爾曼濾波器結構體
typedef struct {
// 狀態估計向量
float x[STATE_DIM];
// 狀態協方差矩陣
float P[STATE_DIM][STATE_DIM];
// 過程噪聲協方差矩陣
float Q[STATE_DIM][STATE_DIM];
// 測量噪聲協方差矩陣
float R[MEASURE_DIM][MEASURE_DIM];
// 狀態轉移矩陣
float F[STATE_DIM][STATE_DIM];
// 測量矩陣
float H[MEASURE_DIM][STATE_DIM];
} KalmanFilter;
// 初始化卡爾曼濾波器
void kalmanFilterInit(KalmanFilter *kf, float initialX, float initialP);
// 卡爾曼濾波預測步驟
void kalmanPredict(KalmanFilter *kf, float controlInput);
// 卡爾曼濾波更新步驟
void kalmanUpdate(KalmanFilter *kf, float measurement);
int main() {
// 初始化卡爾曼濾波器
KalmanFilter kf;
kalmanFilterInit(&kf, 0.0, 1.0);
// 模擬輸入數據
float controlInput = 0.1;
float measurementNoise = 0.5;
// 模擬10次迭代
for (int i = 0; i < 10; ++i) {
// 預測步驟
kalmanPredict(&kf, controlInput);
// 模擬測量
float trueMeasurement = 2.0 * kf.x[0] + measurementNoise;
// 更新步驟
kalmanUpdate(&kf, trueMeasurement);
// 打印結果
printf("Iteration %d - True Value: %f, Estimated Value: %fn", i + 1, trueMeasurement, kf.x[0]);
}
return 0;
}
// 初始化卡爾曼濾波器
void kalmanFilterInit(KalmanFilter *kf, float initialX, float initialP) {
// 初始化狀態估計向量
kf- >x[0] = initialX;
kf- >x[1] = 0.0;
// 初始化狀態協方差矩陣
kf- >P[0][0] = initialP;
kf- >P[0][1] = 0.0;
kf- >P[1][0] = 0.0;
kf- >P[1][1] = initialP;
// 初始化過程噪聲協方差矩陣
kf- >Q[0][0] = 0.001;
kf- >Q[0][1] = 0.0;
kf- >Q[1][0] = 0.0;
kf- >Q[1][1] = 0.001;
// 初始化測量噪聲協方差矩陣
kf- >R[0][0] = 0.01;
// 初始化狀態轉移矩陣
kf- >F[0][0] = 1.0;
kf- >F[0][1] = 1.0;
kf- >F[1][0] = 0.0;
kf- >F[1][1] = 1.0;
// 初始化測量矩陣
kf- >H[0][0] = 1.0;
kf- >H[0][1] = 0.0;
}
// 卡爾曼濾波預測步驟
void kalmanPredict(KalmanFilter *kf, float controlInput) {
// 預測狀態估計
kf- >x[0] = kf- >F[0][0] * kf- >x[0] + kf- >F[0][1] * kf- >x[1] + controlInput;
// 預測狀態協方差矩陣
kf- >P[0][0] = kf- >F[0][0] * kf- >P[0][0] * kf- >F[0][0] + kf- >F[0][1] * kf- >P[1][0];
kf- >P[0][1] = kf- >F[0][0] * kf- >P[0][1] * kf- >F[0][1] + kf- >F[0][1] * kf- >P[1][1];
kf- >P[1][0] = kf- >F[1][0] * kf- >P[0][0] * kf- >F[0][0] + kf- >F[1][1] * kf- >P[1][0];
kf- >P[1][1] = kf- >F[1][0] * kf- >P[0][1] * kf- >F[0][1] + kf- >F[1][1] * kf- >P[1][1] + kf- >Q[1][1];
}
// 卡爾曼濾波更新步驟
void kalmanUpdate(KalmanFilter *kf, float measurement) {
// 計算卡爾曼增益
float K[STATE_DIM][MEASURE_DIM];
float S;
// 計算卡爾曼增益
S = kf- >H[0][0] * kf- >P[0][0] * kf- >H[0][0] + kf- >R[0][0];
K[0][0] = kf- >P[0][0] * kf- >H[0][0] / S;
K[1][0] = kf- >P[1][0] * kf- >H[0][0] / S;
// 更新狀態估計
kf- >x[0] = kf- >x[0] + K[0][0] * (measurement - kf- >H[0][0] * kf- >x[0]);
kf- >x[1] = kf- >x[1] + K[1][0] * (measurement - kf- >H[0][0] * kf- >x[0]);
// 更新狀態協方差矩陣
kf- >P[0][0] = (1 - K[0][0] * kf- >H[0][0]) * kf- >P[0][0];
kf- >P[0][1] = (1 - K[0][0] * kf- >H[0][0]) * kf- >P[0][1];
kf- >P[1][0] = -K[1][0] * kf- >H[0][0] * kf- >P[0][0] + kf- >P[1][0];
kf- >P[1][1] = -K[1][0] * kf- >H[0][0] * kf- >P[0][1] + kf- >P[1][1];
}
卡爾曼濾波的優勢在于它能夠提供對系統狀態的最優估計,同時適應于線性和高斯噪聲的系統。然而,卡爾曼濾波也有一些限制,例如對非線性系統的適應性較差,且需要對系統動態模型和噪聲參數進行良好的估計。
-
濾波器
+關注
關注
161文章
7817瀏覽量
178126 -
濾波算法
+關注
關注
2文章
89瀏覽量
13726 -
卡爾曼濾波算法
+關注
關注
0文章
12瀏覽量
2104
發布評論請先 登錄
相關推薦
卡爾曼濾波的原理和C代碼

卡爾曼濾波簡介
基于SOM降階卡爾曼濾波算法在組合導航上的應用





 工商網監
工商網監
評論