 Speos SSS傳感器特性與EMVA1288標準以及Lumerical傳感器驗證概述
Speos SSS傳感器特性與EMVA1288標準以及Lumerical傳感器驗證概述
概述
本文是Speos Sensor System exporter(SSS)的使用指南,這是一個強大的解決方案,用于camera sensor模擬結果的后處理。本文介紹了一組實際示例,以演示該工具基于EMVA 1288標準從傳感器的降階模型生成電子圖和Raw圖像的能力,使得Speos SSS的核心功能及其在camera模擬應用,提供更深層次的理解。
Speos SSS工具,專為使用Speos camera模擬結果的后處理。該工具將光譜曝光/輻照度圖轉換為Raw圖像、電子圖和顯影圖像。從光度結果到電子圖和原始圖像的轉換基于傳感器的降階模型,遵循EMVA 1288標準。EMVA 1288是一個行業標準規范,描述了機器視覺和成像應用的圖像傳感器性能。它為關鍵傳感器參數提供標準化測試,如響應、動態范圍、噪聲、暗電流和量子效率。
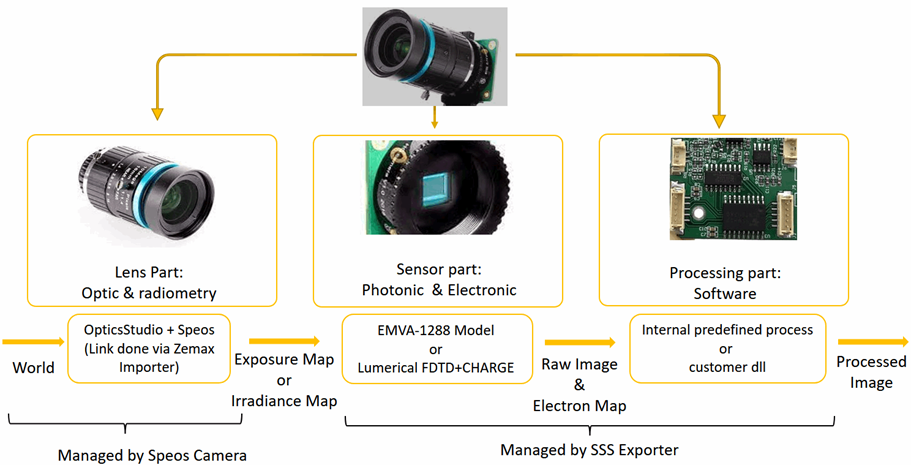
要使用SSS export,并生成Raw圖像和電子圖,需要有speos生成的光譜曝光圖exposure map,或輻照度圖Irradiance map,和EMVA 1288標準傳感器數據。然后,SSS工具自動處理這些數據,以創建有關camera傳感器采集的有價值的結果。為了生成電子圖,SSS利用外部量子效率(EQE)數據,該數據可以從Lumerical或數據表中獲得。
本文旨在展示SSS工具提供的廣泛性和可能性。每個功能都使用實際示例進行演示,并放入相應的文件夾中,以便于執行運算。SSS工具沒有圖形用戶界面,因此了解文件管理對于正確使用至關重要。
為了快速找到所需的示例,下面提供了一個目錄列表,以下案例的運行可根據需求尋找相應的板塊。
1.集成時間vs系統增益
2.暗噪聲
3.PRNU 和 DSNU
4.熱噪聲
5.隨機擾動噪聲
6.Lumerical耦合過程
在案例中并單擊“啟動Speos SSS.bat”文件。此操作將運行示例,生成的結果將存儲在“output”文件夾中,并利用相應的“Inputs”文件夾中的數據。通常不需要修改batch文件,可以正確的調用SSS可執行文件。如果需要,可以在Speos的安裝文件中找到SSS可執行文件(通常在“C:Program files ANSYS Incv232Optical ProductsViewersSSSExporter.exe”中)。注意:如果本地安裝不在上述路徑上,則需要在batch文件中調整位置。如果錯誤信息“無法連接到Virtual Photometric Lab”,需要以管理員身份運行相應版本的Virtual Photometric Lab一次。
傳感器參數
傳感器的參數在sensor.yaml文件中,在該文件中可以輸入填寫傳感器參數。
1.傳感器使用條件的信息,包括增益,偏移,曝光時間和溫度。
2.傳感器的屬性信息,包括分辨率、像素大小和位深度。
3.EMVA數據,描述了與EMVA 1288模型標準相關的傳感器性能,包括紅外和紫外濾波器,量子效率,拜耳矩陣,系統增益,時間暗噪聲,AST, DR,暗電流和空間非均勻性。注:量子效率可以是模擬的輸入,例如用Ansys Lumerical計算的數據導出到json文件。
案例說明
1.Integration time vs System Gain集成時間vs系統增益
在成像場景中,無論是在低光條件下,高對比度的場景,還是需要精細細節的情況下,在傳感器增益和曝光時間之間找到適當的平衡是至關重要的。這種平衡可以幫助實現最佳的圖像質量,減少噪點,并準確地表示場景的動態范圍。通過模擬不同的條件和場景,SSS能夠分析傳感器增益和曝光時間對圖像質量的影響,包括有和沒有暗噪聲。
傳感器增益放大捕獲的信號,使圖像變亮,但它也可能放大噪聲,降低圖像質量。同樣,更長的曝光時間可以讓更多的光線到達傳感器,從而產生更亮的圖像。然而,較長的曝光會導致動態場景中的運動模糊,因此需要與適當的增益設置進行仔細的平衡。
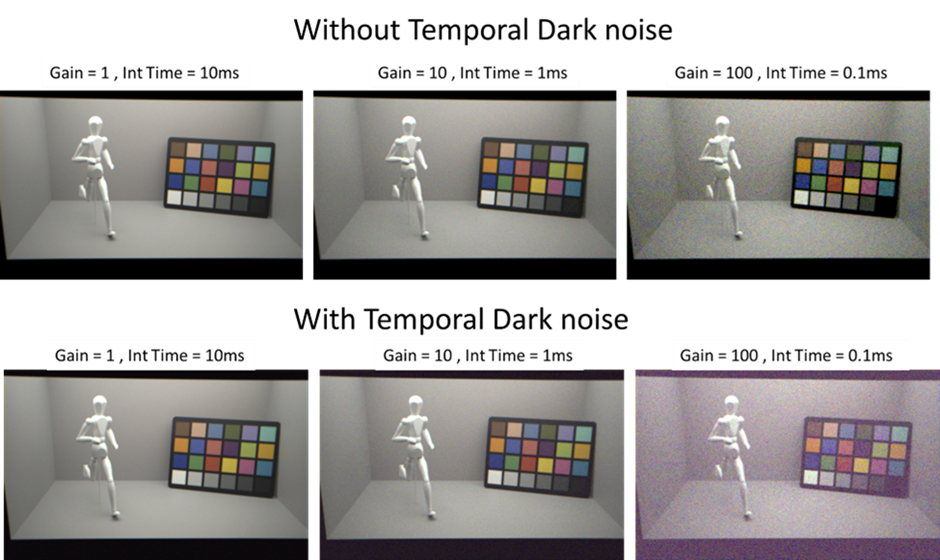
2.Temporal Dark Noise暗噪聲
時間暗噪聲的特征是當沒有光存在時,傳感器輸出信號的變化通常是由電子噪聲和溫度波動引起的。了解時間暗噪聲的影響對于評估傳感器的性能和各種應用的適用性至關重要。SSS export允許使用不同曝光條件下,傳感器輸出中的時間暗噪聲的影響,通過對傳感器YAML文件中的傳感器時間暗噪聲進行實驗,研究傳感器輸出中的噪聲行為。錄制的視頻展示了不同時間暗噪聲水平的顯影圖像結果。
3.PRNU 和 DSNU
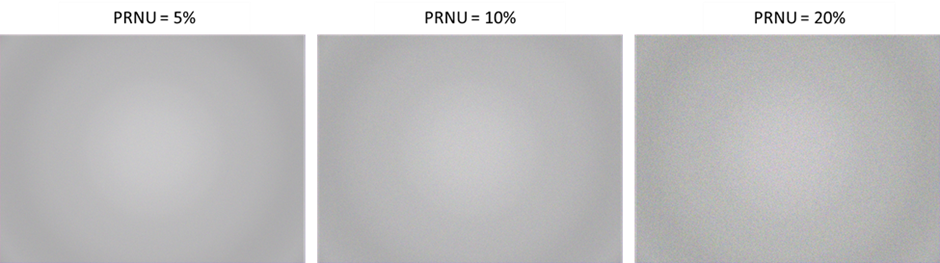
在圖像傳感器特性的背景下,到目前為止討論的大多數參數,都集中在單個像素或它們的平均行為上。但是,必須認識到像素數組的參數可以從一個像素變化到另一個像素。對于線性傳感器來說,光響應不均勻性(PRNU)和暗信號不均勻性(DSNU) 對圖像質量起著至關重要的作用。這些變化可以引入像素靈敏度和暗信號水平的不均勻性,導致圖像中不必要的噪聲和偽影。SSS提供了實驗和校準傳感器特性的能力,如PRNU和DSNU。通過將EMVA相關數據合并到其模擬中,探索這些不均勻性對圖像質量的影響。
PRNU是指圖像傳感器像素間的靈敏度變化,在相同的入射光強度下,會導致像素響應的微小差異。如本例所示,PRNU的校準可以對糾正這些靈敏度變化產生影響,從而獲得更準確和一致的像素響應。
DSNU是指當沒有光入射到傳感器上時,圖像傳感器中各個像素之間暗信號水平的變化。如下所示校準DSNU對于消除不需要的暗信號變化是有用的。這種校準有助于確保圖像數據的準確性和可靠性,特別是在具有挑戰性的照明場景中。
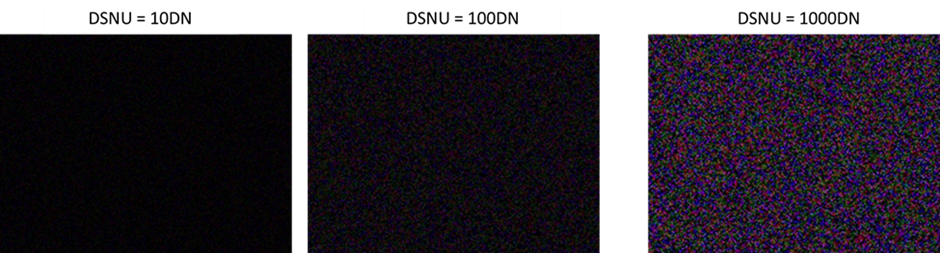
SSS export提供了探索光響應非均勻性和暗信號非均勻性的能力,增強了不同成像應用的圖像質量。
4.Thermal Noise熱噪聲
理解和量化熱噪聲對camera傳感器的特性和性能評估至關重要。這種噪聲的產生是由于存在于傳感器組件中的熱能,導致信號水平的隨機波動。在低光或高增益場景下,傳感器中的這種固有噪聲現象會嚴重影響圖像質量,導致信噪比(SNR)降低,影響圖像的整體清晰度。在需要高靈敏度和高精度的應用中,最小化熱噪聲是必不可少的。
SSS export提供了根據EMVA數據對傳感器熱噪聲進行驗證的功能。通過將熱噪聲模型納入模擬,SSS在不同的操作條件下評估和評估傳感器的熱噪聲性能。
5.Statistical noise隨機擾動噪聲
隨機噪聲是為了突出SSS光子噪聲而增加的參數。它被集成在工具中,可以在Speos map的均勻區域上給出更準確的結果,因為真正的傳感器很少能在多個像素上測量相同數量的光子。原始圖是只包含同質區域的曝光圖。輸出是XMP格式的Raw圖。可以看到面積不再是均勻的。
6.Lumerical耦合
SSS最初是基于EMVA1288標準生成傳感器圖像,用于表征傳感器圖像。然而,該標準對傳感器做了一個主要假設,即量子效率僅與波長有關,并且在傳感器區域內均勻。對于許多傳感器來說,這可能不是真的。實際上,像素的量子效率通常取決于光入射,而光入射在傳感器的每個像素上并不相同。因此,實際量子效率可以看作是波長和光入射(或在像素矩陣上的位置)的函數。這種先進的量子效率可以通過Ansys Lumerical計算出來。可以使用它來精確地設計像素矩陣,并將量子效率導出為JSON文件。
SSS將讀取這個JSON文件作為輸入,它將用于替換EMVA1288標準輸入。Lumerical文件有兩種可用的模式
模式一,QE作為光入射的函數,這種模式僅限于具有旋轉軸的透鏡系統。在JSON文件中,QE被定義為一個3D矩陣:入射vs波長vs拜耳矩陣。如例,2單色變化2種基本的顏色變化
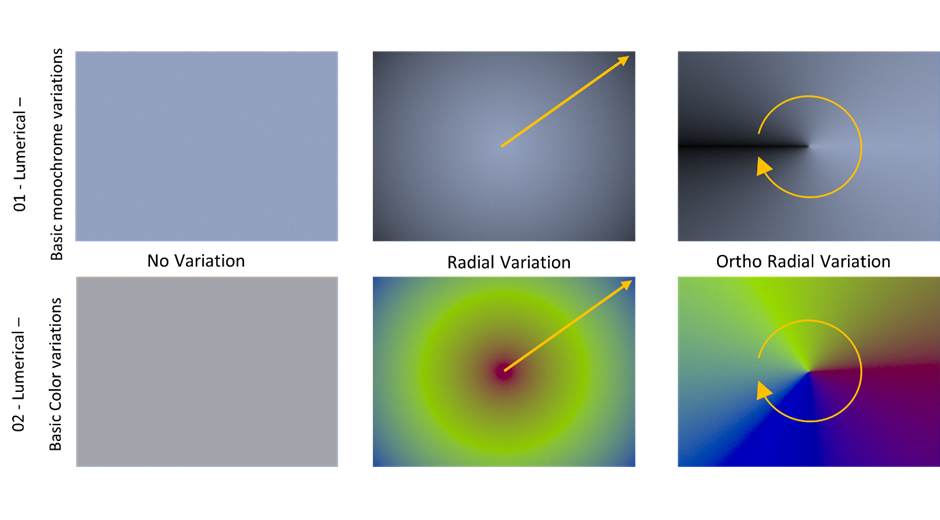
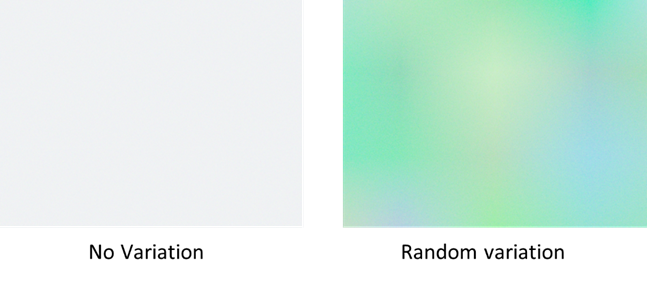
模式二,QE作為傳感器的函數,此模式可用于任何鏡頭系統。在JSON文件中,QE被定義為一個3D矩陣:像素位置vs波長vs拜耳矩陣。數值模式2的例子,隨機顏色變化。
通過這些例子可以看出,Lumerical仿真可以給出更先進、更準確的結果。
結論
本文介紹了Speos Sensor System export功能,用于在Speos中對camera模擬結果進行后期處理。本文展示了基于傳感器的降階模型創建電子圖和Raw圖像的實際示例,與EMVA 1288標準保持一致,涵蓋集成時間、噪聲、耦合等,生成的結果存儲在特定文件夾中。此外,lumerical也將為SSS的后處理,提供更準確的結果。
審核編輯:劉清
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753606 -
濾波器
+關注
關注
161文章
7817瀏覽量
178132 -
機器視覺
+關注
關注
162文章
4372瀏覽量
120325 -
暗電流
+關注
關注
0文章
28瀏覽量
10113 -
熱噪聲
+關注
關注
0文章
46瀏覽量
8159
原文標題:Speos SSS 傳感器特性與EMVA1288標準以及Lumerical傳感器驗證
文章出處:【微信號:光電資訊,微信公眾號:光電資訊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論