 TMTS汽車電子仿真及測試研討會筆記請查收!
TMTS汽車電子仿真及測試研討會筆記請查收!
11月29日,德思特2023年度TMTS汽車電子仿真及測試研討會圓滿結束。感謝大家的觀看與支持!
在直播間收到一些觀眾的技術問題,我們匯總了熱點問題并請講師詳細解答,在此整理分享給大家,請查收!
面向汽車T-BOX與域控制器的HIL測試新方案
Q:目前全球一共只有100多顆衛星,為什么你們的模擬器需要模擬那么多的通道?有什么應用嗎?
衛星數量和模擬仿真通道不是等同的,我們一般在GNSS模擬仿真中的搜星通道一般指的是:每個通道代表一顆衛星輸出的一個星座的一個頻點。這樣算下來的話,如果需要同時仿真世界上所有的衛星與頻點,則一共需要上百個通道。此外伴隨著多徑效應模擬、多待測件/多車模擬,以及一些新的應用,需要的通道數就會更多,我們保證了用戶模擬的全面性,以及對于未來的擴展性。此外,這些通道是免費開放給用戶的,無需額外付費。

Q:軟件定義形式有什么優勢呢?我自己也可以搭建?
軟件定義顧名思義,就是以軟件為核心,一方面他帶來了靈活性、擴展性以及經濟效益;此外核心軟件Skydel帶來了大量獨特的功能,他不因為硬件的變化而改變,最大程度上提供了高性能仿真能力。我們也歡迎用戶自己去搭建GNSS模擬器,在Skydel的基礎上,采用自己的硬件,我們有提供豐富的指導文件。
Q:能詳細介紹下軟件定義架構與硬件驅動的區別嗎?
軟件定義架構(Software-Defined Architecture)和硬件驅動之間有幾個主要的區別:
● 抽象層級:軟件定義架構通過在軟件中定義和管理資源,引入了一個抽象層級,使得應用程序可以通過軟件界面來訪問和管理底層資源。而硬件驅動是直接與硬件設備交互的程序。
● 靈活性和可編程性:軟件定義架構通過軟件配置和管理資源,具有更高的靈活性和可編程性,可以根據需求動態改變資源分配和配置。相比之下,硬件驅動的功能和性能通常是固定的,不容易變更。
● 硬件依賴性:軟件定義架構減少對特定硬件的依賴,通過引入抽象層級可以在不同的硬件環境中運行。而硬件驅動通常是為特定硬件設備或芯片定制的,對其他硬件可能不適用。
簡而言之,軟件定義架構通過軟件對資源進行配置和管理,具有靈活性和可編程性,并減少對特定硬件的依賴。而硬件驅動直接與硬件設備交互,是硬件資源的控制和管理。
Q:請問軟件在環與硬件在環的具體操作是?
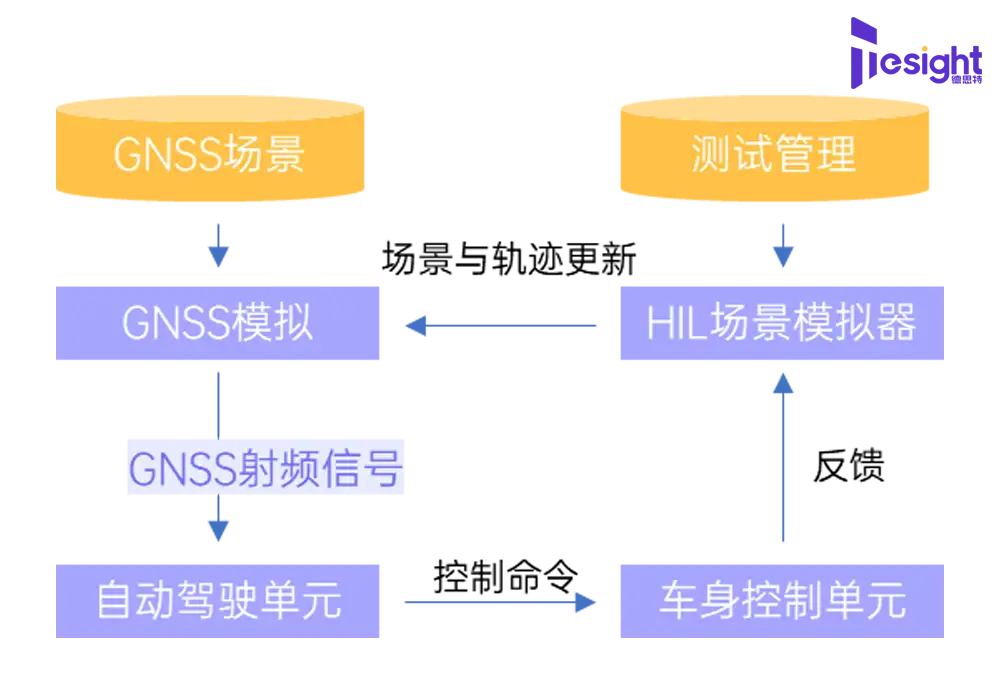
GNSS模擬器在軟件在環與硬件在環中的使用方法類似,區別在于是否真正地輸出了射頻信號。這里我以硬件在環為例進行介紹。
用戶實時發送真實的車輛軌跡,并生成相應的GNSS射頻信號。圖中描繪了一個閉環,其中真實位置傳輸到系統中,自動駕駛儀應用命令實時影響車輛軌跡。系統中的HIL模擬器和Skydel GNSS模擬器造成的附加延遲必須足夠小,來保障不會對自動駕駛儀和GNSS接收器性能的測試和測量產生負面影響。整體系統框圖如下:
物理連接上:
b) 通信協議采用TCP/IP,真實位置信息傳輸通過UDP協議
c) 提供開放API用于Skydel軟件的開放編程與遠程控制
d) 另外需要借助時鐘裝置對HIL模擬器與GNSS模擬器做同步
此外, 德思特提供了一個Skydel HIL客戶端(Skydel HIL Client),這是一個提供簡單API的庫。強烈建議使用此庫,不要嘗試與Skydel重新實現通信協議。Skydel HIL客戶端需要以太網連接,并且對大多數命令混合使用TCP/IP,對真實位置數據使用UDP。Skydel HIL客戶端增加了延遲,延遲主要由以太網連接定義。
 軟件定義的GNSS模擬器
軟件定義的GNSS模擬器Q:多實例和多輛車是一個概念嗎?
這是一個包含概念,多輛車屬于多實例仿真的一種,我們認為在同一臺設備內進行的多個獨立且實時的仿真場景或軌跡,就是多個實例。因此,多實例可能的情況是:
● 多天線:例如同一輛車或者飛機的多個天線,每根天線獨立使用,具有獨立的信號采集與分析功能,因此是多實例。
● 多車或多無人機:模擬場景下多個實體的交互、運行等,屬于多個獨立信號的運行,因此是多實例。
● RTK:因為同時具有基準站與流動站兩個獨立實體,因此是多實例。

汽車總線物理層測試方案
Q:你們的數字化儀是PCIe什么標準?是不是主機帶有匹配的插槽就可以開始使用?對工控機有什么要求嗎?
我們不同的數字化儀對應的PCIe標準不一樣,低速采集的板卡是4.0的標準, 中高速的采集卡是PCIe8.0或者16.0. 主板帶有對應插槽就可以,并且您有8.0的插槽條,可以兼容4.0的插槽。
 德思特數字化儀
德思特數字化儀Q:這個數字化儀有觸發輸入接口嗎?只能采集模擬信號嗎?
有的,我們有觸發輸入的接口,本身的采集通道也可以作為觸發通道。數字化儀除了模擬信號,我們還有預留的16個數字IO通道,數字IO和模擬IO可以同時采集。當然如果您只是想獲取數字IO,我們也有很多數字IO板卡提供。
汽車大電流注入測試
Q:開環和閉環法怎么選擇?依據是什么?
開環和閉環方法是以測試布置為依據來做區分,不同的方法測試布置要求明顯不同,測試結果也有差異,相對而言,閉環測試法的要求更加嚴苛。一般來說,我們測試標準中會有規定需要用哪種測試方法,如果沒有規定需要自己選擇,那么選擇開環還是閉環法主要取決于你的產品設計和測試要求。如果你的產品設計和測試要求較為嚴格,那么可能需要選擇閉環法。如果你的產品設計和測試要求相對較為寬松,那么開環法可能是一個更好的選擇。總的來說,選擇哪種方法主要取決于你的具體需求和情況。在做出選擇時,你可能需要考慮你的產品設計、測試要求以及你的資源和能力。
Q:你們的報告生成器可以生成的文件有哪些內容呢?
生成報告分為三個步驟。首先,創建或者選擇一個模板文件作為報告的基礎。然后設置所需的報告生成器設置。最后生成并檢查測試報告。
①模板文件可以采用Microsoft Word、Microsoft Excel或文本格式制作。
②選擇模板文件并確定報告內容后即可生成報告,模板文件中包含各個測試的代碼(只列舉了幾項)。
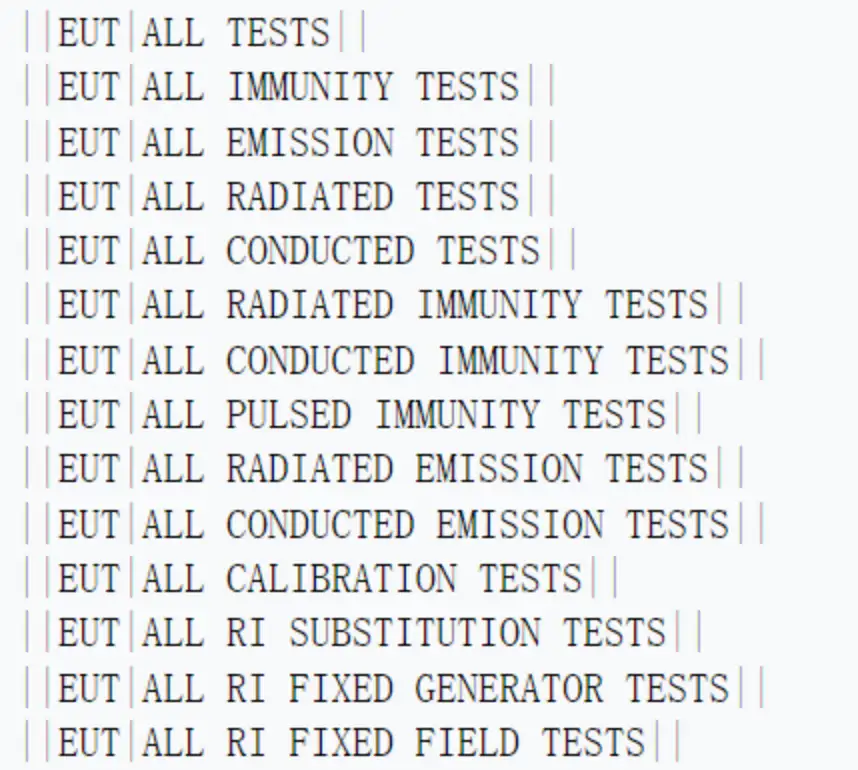
③報告生成器可以生成圖形文件和表格文件,報告生成器已進行擴展,不僅可以更輕松地指定應包含哪些圖表,而且甚至可以在一個圖表中包含多條“線”。可以生成不限于以下內容:
● 組合多條圖表線
● 單頻段多頻段測試中產生的所有數據的記錄,包括像輻射抗擾中生成的磁場圖
● 可定制的AD通道測量表
Q:請問你們的套裝支持什么標準呢?

從上圖可以看出,我們的套裝支持,國際標準,國家標準,除了表格中說到的這一些,由于我們能產生大于200 mA的電平等級且產生的頻率范圍覆蓋我國車企的標準。那么我們還支持絕大部分車企的標準。
 德思特汽車大電流注入測試方案
德思特汽車大電流注入測試方案汽車傳感器仿真和信號分析
Q:我看直播里面講的傳感器仿真是基于壓阻式的基本傳感器,那對于智能傳感器,比如MEMS這種可以仿真嗎?
這個比較復雜的智能傳感器集成了部分芯片,主控在里面,這個是我們仿真板卡做不到的。不過這種情況,一般是針對于自動駕駛里面應用居多,都是在軟件層上去做仿真模擬。如果您有這種仿真測試的集成需求,也可以找我們,我們背靠研發團隊,是可以給您完全的解決方案的。
Q:如果我想做一套故障注入的測試系統,但是想用網線去控制,可以實現嗎?
這個也是可以做到的,我們有這種LXI機箱,插入PXI板卡,可以通過以太網或者USB去控制。
面向自動駕駛與智慧城市的C-V2X與C-ITS方案
Q:Sdk 支持哪些軟件語言,或者軟件集成開發環境?
支持C和Python的語言。軟件集成開發環境要求如下:
1.操作系統要求:Ubuntu Linux 18.04或更高版本。
2.V2X設備要求:安裝、授權并運行德思特V2X軟件堆棧。
3.Python SDK要求:
- pip3包管理器,用于安裝Python軟件包。
- Python 3.7或更高版本,用于運行Python示例。
4.C SDK要求:
- 開發者環境,例如build-essentials、cmake等,可以從.c源代碼生成可執行文件并運行
Q:你們提供的這個應用程序和高德、百度這些有什么區別?
最大的區別就是它顯示基于V2X的數據,并顯示情境警告。例如前方碰撞警告等一系列的應用場景,可以在車載顯示屏上顯示,也可以與后視鏡集成,相較于直接使用手機會有更大的安全性,不易分散注意力。而且是不需要蜂窩網絡連接就能實現提醒,在沒有信號的情況下或者信號差的情況下也可以使用。
Q:你們的V2X協議棧有指定的硬件?
我們的V2X協議棧沒有指定硬件,它支持國際上目前常用的ETSl、ISO、IEEE、SAE、CAICT、CAICV、CCSA定義的標準和指令,以及C2C-CC、C-Roads、NISSTC的配置文件。
 德思特C-V2X與C-ITS方案
德思特C-V2X與C-ITS方案Q:V2X消息接口怎么訪問呢?
我們的V2X堆棧提供了SDK,可以整合車輛數據(例如CAN接口提取的專有車輛數據等)發送來源更加豐富的V2X消息,也可以是發送自定義的V2X消息,同時可以處理接收到的設備消息(包括其他車輛和道路基礎設施、傳感器等)和自定義消息。更多詳細信息可以聯系德思特技術工程師獲取《德思特V2X軟件棧和SDK的使用指南》,其中對于具體案例和訪問方法都有介紹。
-
汽車電子
+關注
關注
3026文章
7962瀏覽量
167072 -
GNSS
+關注
關注
9文章
771瀏覽量
47947 -
串行總線測試
+關注
關注
0文章
3瀏覽量
6205
發布評論請先 登錄
相關推薦
2025電子設計與制造技術研討會
Imagination 系列研討會 |中國生成式 AI 的發展

飛騰成功舉辦散熱技術應用發展研討會
LitePoint創新測試技術研討會圓滿結束
LitePoint將亮相藍牙技術研討會亞洲站

是德科技半導體芯片與無線通信測試技術研討會完美收官
開始報名!PCB/封裝設計及系統 SI/PI/Thermal 仿真專場研討會——2024 Cadence 中國技術巡回研討會

集成電路測試人才培養主題研討會圓滿舉行

SGS受邀參加Ansys車規芯片功能安全和可靠性研討會

光峰科技出席DVN底特律汽車照明研討會
是德科技智能算力‘芯’技術研討會回顧
經緯恒潤2023年汽車電子軟件研發技術研討會圓滿落幕!






 工商網監
工商網監
評論