") 水下無人航行器的研究現(xiàn)狀與展望
水下無人航行器的研究現(xiàn)狀與展望
近年來,隨著新能源等各項(xiàng)新興科學(xué)技術(shù)的發(fā)展,對(duì)海洋工程和海洋軍事等的發(fā)展需求也變得日益強(qiáng)烈。對(duì)海洋的開發(fā)和利用的前提是認(rèn)識(shí)海洋,認(rèn)識(shí)海洋就必須對(duì)海洋進(jìn)行調(diào)查研究。
對(duì)海洋環(huán)境的調(diào)查主要包括軍用和民用兩部分。軍用調(diào)查主要是與反水雷、反魚雷、反水下偵聽等軍用相關(guān)的調(diào)查;民用調(diào)查主要是與海洋科考、海洋資源勘探和利用、海底光纜和管線等民用相關(guān)的調(diào)查。軍用和民用海洋聲學(xué)調(diào)查都是通過聲納等設(shè)備對(duì)水下環(huán)境進(jìn)行成像以及后繼的數(shù)學(xué)分析處理來完成的。然而,一個(gè)獨(dú)立的聲納系統(tǒng)無論如何是不可能完成海洋調(diào)查任務(wù)的,它必須被搭載在一個(gè)載體上,在載體的幫助下才可能完成調(diào)查任務(wù)。
常見的搭載平臺(tái)經(jīng)歷了從水面艦船到載人潛器(HOV)到水下無人航行器(UUV)的歷程。HOV和UUV的研究分別起步于1890年和1960年左右。它們具有活動(dòng)范圍大、機(jī)動(dòng)性強(qiáng)和作業(yè)效率高等優(yōu)點(diǎn)。近年來,隨著深遠(yuǎn)海海洋調(diào)查的需求,HOV和UUV扮演著越來越重要的角色。
UUV又分為遙控潛器(ROV)和自主式潛器(AUV)。AUV具備不依賴母船供電、擺脫了ROV中光纜/電纜等的束縛,以無人自主控制為主要控制方式等優(yōu)點(diǎn)下環(huán)境的復(fù)雜性,ROV由于有人的參與,執(zhí)行任務(wù)相比AUV更加靈活便捷。
以上就是UUV研究的背景介紹。接下來,本文將對(duì)UUV的分類、發(fā)展歷史、知名的研究機(jī)構(gòu)、典型產(chǎn)品概況、國(guó)內(nèi)研究現(xiàn)狀、未來發(fā)展方向等進(jìn)行詳細(xì)論述。最后,對(duì)全文進(jìn)行了總結(jié)。本文的論述側(cè)重UUV中最重要的兩類:AUV和ROV。
一、分類、發(fā)展歷史與典型產(chǎn)品概述
⒈無人航行器的分類
每類UUV都有一種或數(shù)種特定的用途。對(duì)不同的用途,UUV的設(shè)計(jì)和技術(shù)指標(biāo)都有一定的針對(duì)性。UUV按體積可分為便攜型、輕型、重型和巨型幾大類。各類UUV的相關(guān)基本技術(shù)指標(biāo)見表1。其中,便攜型和輕型主要用于港口、航道和近海淺海的防務(wù)與調(diào)查等等。重型和巨型由于航程大和載重量大等優(yōu)點(diǎn)可以用于遠(yuǎn)海深海的調(diào)查等。
表1 按體積分類的各類UUV的基本技術(shù)指標(biāo)
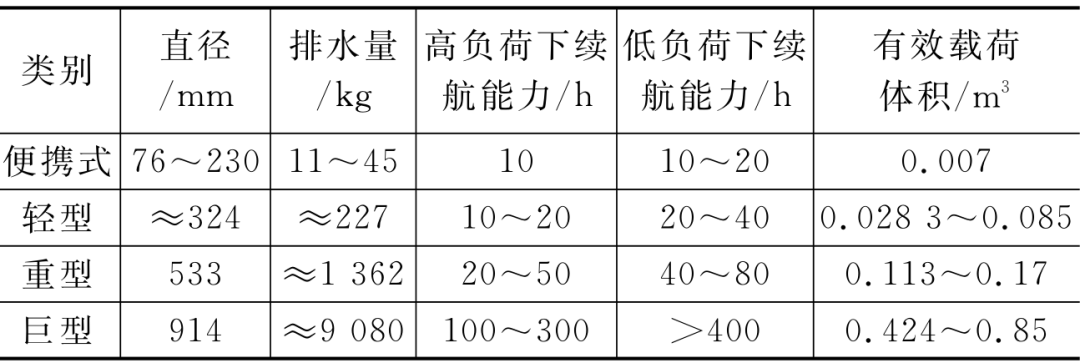
對(duì)于用作海洋聲學(xué)調(diào)查的UUV,要求其具有較高的姿態(tài)角、姿態(tài)角速度、位置、航速等控制精度,并且還要兼顧穩(wěn)定性與機(jī)動(dòng)性。同時(shí),還要求該類UUV對(duì)各類聲學(xué)設(shè)備有較強(qiáng)的搭載能力,較強(qiáng)的聲學(xué)圖像處理和后處理能力,一定的目標(biāo)自主判讀能力和高速大寬帶通信能力等等。
ROV在UUV中屬于比較特殊的一類,下面重點(diǎn)介紹ROV系統(tǒng)的組成和分類。ROV系統(tǒng)主要包括水面和水下兩個(gè)主體單元。水面單元包括絞車和集控操作臺(tái)(一般為一個(gè)集裝箱),水下單元就是ROV機(jī)器人。水面單元與水下單元通過電纜或光纜連接,水面部分可以向ROV發(fā)送控制指令、導(dǎo)航定位信息等。而ROV可以向水面單元反饋?zhàn)陨頎顟B(tài)、水下探測(cè)的圖像信息等。由于ROV可以接收水面單元發(fā)送的導(dǎo)航定位信息,所以ROV通常搭載低成本的微機(jī)光電(MEMS)慣性導(dǎo)航裝置,而AUV由于沒有水面單元進(jìn)行輔助導(dǎo)航,一般搭載高精度的光纖或激光慣性導(dǎo)航裝置。ROV系統(tǒng)由于有人參與控制、通信與水下圖像判別等,所以可以執(zhí)行更加復(fù)雜、艱巨的水下作業(yè)任務(wù)。這是相比AUV的一個(gè)較明顯的優(yōu)勢(shì)。當(dāng)然,相對(duì)AUV的劣勢(shì)就是活動(dòng)范圍受纜長(zhǎng)等因素的限制。
ROV可以分為3種形式:底部爬行式、中水層浮游式以及混合式。
⑴底部爬行式:只能在海底作爬行,它的設(shè)計(jì)總是為某一個(gè)特定的工作而設(shè)計(jì)的,而不是為一個(gè)籠統(tǒng)的目的,早期主要用來進(jìn)行海底挖溝,用于掩埋管道、電纜等。
⑵中層浮游式:可通過電纜給潛水器提供動(dòng)力及控制信號(hào),潛水器只能在水中進(jìn)行前后左右上下運(yùn)動(dòng),同時(shí)可以向左或向右旋轉(zhuǎn),這種ROV作業(yè)任務(wù)廣泛。
⑶混合式:這種系統(tǒng)仍然是靠水面提供能源并提供控制,推動(dòng)力是從輪子、軌道或者拖拉撞擊某一個(gè)結(jié)構(gòu)來獲取的。
⒉發(fā)展歷史與典型產(chǎn)品概述
1957年,第1臺(tái)真正意義的AUV-SPURV在美國(guó)華盛頓大學(xué)發(fā)明。UUV技術(shù)比較先進(jìn)的國(guó)家包括美國(guó)、加拿大、挪威、英國(guó)、法國(guó)、德國(guó)、俄羅斯和日本等。美國(guó)的UUV主要包括先進(jìn)無人搜索系統(tǒng)(AUSS),曼塔(Manta)航行器、Remus6000等系列航行器、藍(lán)鰭金槍魚(Bluefin)系列航行器、MK30潛艇模擬器、Odyssey、Cayibou、遙控環(huán)境測(cè)量裝置、戰(zhàn)場(chǎng)準(zhǔn)備自主式水下航行器、近期水雷偵察系統(tǒng)、遠(yuǎn)期水雷偵察系統(tǒng)和任務(wù)重組式航行器等等。美國(guó)配套的UUV試驗(yàn)平臺(tái)有21UUV、大直徑UUV(LDUUV)和STDV等等。
AUSS是美國(guó)海軍空海戰(zhàn)系統(tǒng)中心(SPAWAR)研制的高級(jí)水下搜索系統(tǒng),它首次徹底摒棄了典型的長(zhǎng)電纜深潛器方法。AUSS的外形圖見圖1。Menta是一個(gè)以最下危險(xiǎn)來擴(kuò)展海軍力量范圍的概念系統(tǒng),目前有一個(gè)技術(shù)驗(yàn)證系統(tǒng),其全長(zhǎng)約10.36m,水面排水量7.25t,負(fù)載能力1500kg,最大速度10kn,續(xù)航力5h(5kn時(shí))。Menta的外形圖見圖2。Remus6000自主無人水下航行器是Hydroid公司系列AUV產(chǎn)品中工作深度最大的一型。由于Remus6000型AUV采用跟蹤海底的自主作業(yè)模式,它可攜帶有效載荷達(dá)到很大水深,以測(cè)量海水特性,包括電導(dǎo)率、溫度及化學(xué)成分,并且通過測(cè)深、側(cè)掃聲納、磁學(xué)、重力學(xué)以及照相等測(cè)繪和海底成像。2009年6月1日法航AF447航班在大西洋失事,2011年2套R(shí)emus6000在失事海域進(jìn)行了深海搜尋、探測(cè)。2011年4月3日Remus6000的側(cè)掃聲納以700m的量程、120KHz頻率,發(fā)現(xiàn)了一個(gè)600m×200m的失事航班遺骸散落區(qū)。BluefinAUV系列包括Bluefin-9、Bluefin-12、Bluefin-21、Bluefin-21BP等4個(gè)AUV產(chǎn)品,在科學(xué)、軍事和商業(yè)等應(yīng)用領(lǐng)域均擁有較高的聲譽(yù)。在馬航失聯(lián)事件水下搜尋過程中,澳大利亞使用了美國(guó)生產(chǎn)的“Bluefin-21”進(jìn)行搜尋。“Bluefin-21”代表了目前深水搜索的先進(jìn)水平,該產(chǎn)品裝備有聲學(xué)探測(cè)和光電成像設(shè)備,能夠?qū)崿F(xiàn)對(duì)海底大范圍、高分辨的搜尋與掃描,確定遇險(xiǎn)目標(biāo)位置,并根據(jù)水下遇險(xiǎn)目標(biāo)的高清晰光學(xué)圖像能夠?yàn)榫戎驌频臎Q策提供技術(shù)支撐。
加拿大的UUV主要包括探索者級(jí)系列、ARCS和Theseus等等。其中,探索者級(jí)AUV長(zhǎng)約4.5m,直徑0.69m。在該AUV的負(fù)載段可攜帶各種不同的負(fù)載,根據(jù)搭載負(fù)載的不同,其空氣中的重量在580~800kg之間,其最大潛深為300~500m,其巡航速度在0.5~2.5m/s之間。其攜帶的1.1m長(zhǎng)可伸縮通信天線,有助于任務(wù)的再規(guī)劃,并且可以增加母船和航行器之間的通信距離。
挪威的UUV主要有Hugin(休金)系列。英國(guó)的主要包括Autosub和護(hù)身符等。法國(guó)的主要是Alister系列。德國(guó)的主要是海獺系列。俄羅斯的主要包括SKAT、L-2和MT-88等等。日本的主要有R-one、R2D4、URASHIMA和深海6500等等。
國(guó)內(nèi)多家單位開展了UUV相關(guān)研究。目前,中國(guó)已經(jīng)研制出了潛深100~11000m的全海深的各類UUV。例如,研制出的“潛龍一號(hào)”自主水下航行器最大工作水深為6000m、巡航速度為2kn、最大續(xù)航能力24h、空氣中重量1500kg。“潛龍一號(hào)”已經(jīng)完成了大洋第29航次的應(yīng)用性試驗(yàn)任務(wù),任務(wù)包括近海底聲學(xué)和水文等綜合調(diào)查。
下面,介紹一下ROV的發(fā)展歷史:
⑴嬰兒階段(1953-1965年)。F.Busby R等學(xué)者認(rèn)為第一個(gè)ROV很可能是1853年由Dimitri Rebikoff制造的。它叫做POODLE,它是Rebikoff的潛水傳送器PEGASUS的改進(jìn)產(chǎn)品。隨著水下攝像機(jī)的發(fā)展和應(yīng)用,尋找目標(biāo)的方法是通過將一艘船只系固在某一區(qū)域并且移動(dòng)或牽引一個(gè)三角架,這個(gè)三角架在一個(gè)平底容器中承載著攝像機(jī),并且沿著海底傾斜。用打撈機(jī)尋找丟失的物體是一種即沒有效率又很艱苦的方法,但它確實(shí)能找到。J.R.R.(Bob)Harter同海軍艦隊(duì)局共同找到了減小低效性的一個(gè)方法,研制一個(gè)易操作的水下攝像系統(tǒng)———移動(dòng)水下機(jī)器人系統(tǒng)。需要構(gòu)建出一些單元,隨著試驗(yàn)成功的程度改變,最終形成了一個(gè)理想工作的單元———6號(hào)系列。它于1961年被交給海軍軍事用品測(cè)試局。它被稱作是VARE機(jī)器人,它裝有一個(gè)蛤殼狀的爪,由海軍實(shí)驗(yàn)室操作和管理。不幸的是,這臺(tái)機(jī)器有太多的問題而且可靠性較低,所以,它很難離開實(shí)驗(yàn)室被產(chǎn)業(yè)化。隨后,它的改進(jìn)型———纜控水下探索機(jī)器人(CURV)被研制出來并得到了一定的推廣應(yīng)用。
⑵兒童階段(1966-1974年)。在美國(guó)海軍大量的搜索和恢復(fù)努力下,CURV1996年在西班牙沿海從水下2850英尺(869m)深處確定位置并成功找回一個(gè)遺失的氫彈的事件中扮演了重要的角色。在超過它的最大潛水深度的水深眾,而且炸彈還與降落傘的傘繩纏到儀器的情況下,它成功地巡回炸彈并因此立刻名聲大噪。早期的CURV在軍事上很是得意,并以增大其家族成員作為回報(bào)。海軍實(shí)驗(yàn)室的資金開始慢慢流向支持額外工作,技術(shù)開始進(jìn)步。為了在淺水環(huán)境下工作,更小型的機(jī)器被研制,它是用水面上來的液壓控制,它是繼電子SNOOPY之后的產(chǎn)品。隨同其他機(jī)器儀器,CURV的功能繼續(xù)進(jìn)化,攜帶單元越來越多。ROV的發(fā)展很不幸,它們?nèi)匀粓?jiān)持載人潛水器,需要操作人員在遠(yuǎn)程位置進(jìn)行工作的能力。隨著ROV慢慢地持續(xù)發(fā)展,最大潛水和載人潛水器盛行起來,到1974年為止,制造了20多臺(tái)機(jī)器。但是,并沒有真正的大事件讓新型機(jī)器和潛水器和載人潛水器去爭(zhēng)奪大家的注意中心,直到1973年,在水深1575英尺下,PISCES3型載人潛水器載著它的兩個(gè)乘坐人員慢慢到了氧氣耗盡的底部。最后通過海軍無人系統(tǒng)CURV3營(yíng)救成功后,達(dá)到了轟動(dòng)性的影響。
⑶青春期階段(1975-1982年)。成熟階段總體來說就是數(shù)目的猛然增長(zhǎng),重點(diǎn)是令人莫名其妙獲知無理性的行為的那段時(shí)間。盡管ROV迅速發(fā)展這段時(shí)期是有爭(zhēng)論的,而且很多人還說現(xiàn)在還在繼續(xù)著,然而他卻是一座里程碑,發(fā)展曲線幾乎成級(jí)數(shù)增長(zhǎng),到1982年為止已經(jīng)生產(chǎn)了500多臺(tái)機(jī)器。
⑷“不成熟階段”(1982-1989年)。盡管ROV在發(fā)展和被認(rèn)同上都有了進(jìn)步,仍被許多人認(rèn)為在一段長(zhǎng)時(shí)間是“不成熟階段”。在這個(gè)時(shí)期內(nèi),ROV出現(xiàn)了一些反復(fù)狀態(tài),技術(shù)在進(jìn)步,系統(tǒng)也正在升級(jí)中。
⑸成熟階段(1990年至今)。自20世紀(jì)90年代到來為止,ROV工業(yè)到達(dá)了它的成熟期,形成了一個(gè)巨大的互動(dòng)產(chǎn)業(yè),全球有超過100家的制造商。
下面,對(duì)本節(jié)內(nèi)容進(jìn)行歸納總結(jié)。水下無人航行器等海洋裝備包含的關(guān)鍵技術(shù)有:導(dǎo)航算法、水下對(duì)接、布放與回收、浮力調(diào)節(jié)、綠色低功耗推進(jìn)、軌跡跟蹤與路徑規(guī)劃、總體技術(shù),等等。其中,導(dǎo)航與控制是自主式航行器的核心技術(shù)。近年來,涌現(xiàn)出大量的導(dǎo)航新技術(shù)、控制的新算法等成果,極大地提升了該類裝備的智能化。此外,還有很多關(guān)于該研究領(lǐng)域的總體發(fā)展趨勢(shì)、關(guān)鍵技術(shù)、總體測(cè)試技術(shù)等的綜述性文章對(duì)本領(lǐng)域的研究做了深入而全面的分析。
二、我國(guó)UUV的研究現(xiàn)狀
我國(guó)很早就開展了UUV裝備和技術(shù)的研究。針對(duì)遠(yuǎn)程運(yùn)載、水下防務(wù)、信息對(duì)抗、大壩及水庫(kù)檢查到水下打撈等應(yīng)用領(lǐng)域,我國(guó)對(duì)大型、中型、小型和微型UUV都進(jìn)行了深入研究,有很多成熟的型號(hào)。例如,我國(guó)研制的MerMan-100型AUV配備有中科院聲學(xué)所研制的聲學(xué)設(shè)備,主要針對(duì)海洋監(jiān)測(cè),水質(zhì)檢測(cè),軍團(tuán)協(xié)作作業(yè),母船、港口和航道防務(wù)等使命任務(wù)設(shè)計(jì)。該AUV的技術(shù)特點(diǎn)是采用模塊化設(shè)計(jì)思路,根據(jù)不同的作業(yè)任務(wù)增減不同作業(yè)模塊,有利于便攜作業(yè)。海豚一號(hào)是一種小型AUV,搭載浙江大學(xué)研制的合成孔徑聲納,主要用于探測(cè)水下小目標(biāo)和掩埋目標(biāo)。
一種典型的AUV組成結(jié)構(gòu)如圖所示。
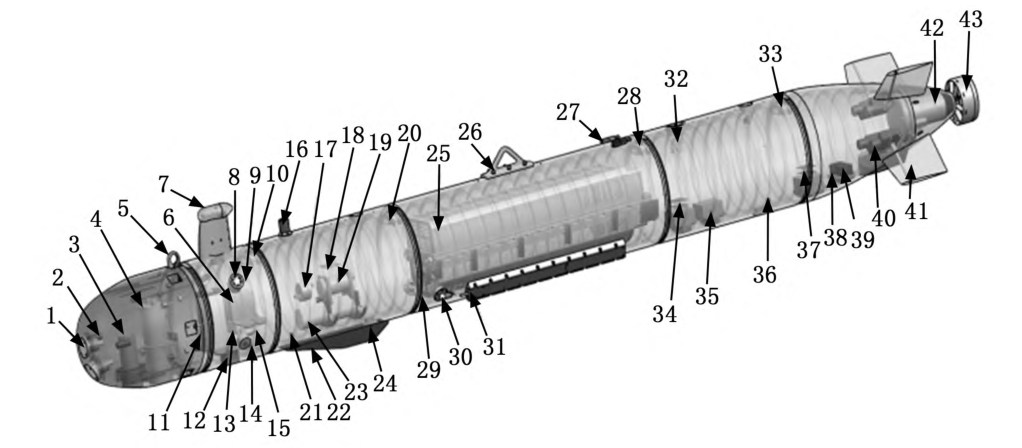
1.避碰高度計(jì);2.水聲應(yīng)急信標(biāo);3.應(yīng)急拋載;4.深海相機(jī);5.拖曳環(huán);6.中控;7.北斗示位定位裝置;8.調(diào)試口;9.交換機(jī);10.快速對(duì)接裝置;11.慣導(dǎo);12.DVL換能器;13.DVL控制盒;14.導(dǎo)航控制段漏水報(bào)警板;15.深度計(jì);16.水聲通信換能器;17.水聲通信控制盒;18.聲納存儲(chǔ)處理板;19.閃光燈電源盒;20.快速對(duì)接裝置;21.載荷段漏水報(bào)警板;22.閃光燈;23.側(cè)掃聲納電子艙;24.閃光燈入艙件;25.二次鋰電池組;26.起吊環(huán);27.充電口;28.快速對(duì)接裝置;29.能源段漏水報(bào)警板;30.聲納入艙件;31.側(cè)掃聲納換能器;32.電源開關(guān);33.快速對(duì)接裝置;34.繼電器板;35.儀器電電源模塊;36.載荷拓展段漏水報(bào)警板;37.艉部單片機(jī)板;38.推進(jìn)段漏水報(bào)警板;39.舵機(jī)控制器;40.舵機(jī);41.舵板;42.主推電機(jī);43.推進(jìn)器。
圖 一種典型的AUV組成結(jié)構(gòu)
此外,我國(guó)還研制出一款小型搜救ROV,廣泛地應(yīng)用到各類搶險(xiǎn)救災(zāi)領(lǐng)域。該ROV靈活機(jī)動(dòng)、抗流能力較強(qiáng)。該ROV采用了扁平的立方體外形,利用光纜對(duì)它進(jìn)行操縱。該ROV裝載的是美國(guó)的DIDSON聲納,該聲納采用了聲學(xué)透鏡技術(shù),成像質(zhì)量好,分辨率高。該ROV由于小巧靈活,可以適應(yīng)淺近海的各種復(fù)雜地形。同時(shí),它具有較高聲學(xué)成像質(zhì)量,所以它可以高效地執(zhí)行各類復(fù)雜的搜索與救援任務(wù)。
國(guó)內(nèi)某研究機(jī)構(gòu)還研制出一款大深度AUV,它主要用于大深度水下目標(biāo)探測(cè)與搜救任務(wù)。該型AUV可以在6000m深的海域進(jìn)行至少24h的目標(biāo)搜索與探測(cè)。該AUV采用的是較先進(jìn)的十字分布四槳推進(jìn),如圖5所示。該AUV的實(shí)物如圖6所示。
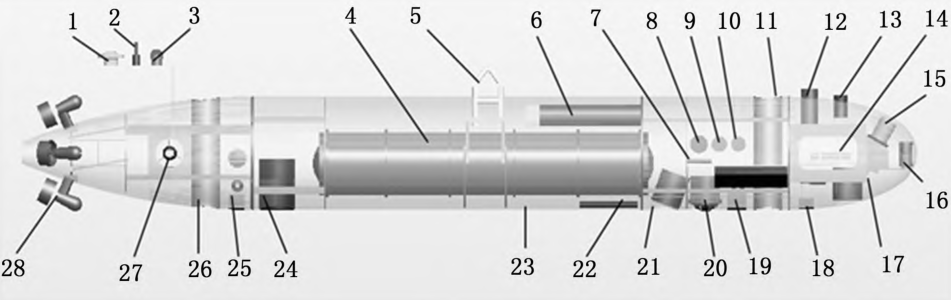
1.衛(wèi)星定位裝置天線;2.電臺(tái)天線;3.頻閃燈;4.耐壓艙;5.吊鉤;6.側(cè)掃聲納電子艙;7.深度計(jì);8.水聲通信設(shè)備電子艙;9.水聲定位設(shè)備電子艙;10.定向?qū)б暭{電子艙;11.垂直推進(jìn)器(前);12.水聲通信設(shè)備換能器;13.水聲定位設(shè)備換能器;14.CTD;15.拋纜裝置;16.前視聲納;17.定向?qū)б暭{換能器(水平陣);18.上浮拋載裝置;19.下潛拋載裝置;20.DVL;21.水下相機(jī)閃光燈;22.定向?qū)б暭{換能器(豎直陣);23.浮力材料;24.水下照相機(jī);25.平衡拋載裝置;26.垂直推進(jìn)器(后);27.尾部橫向推進(jìn)裝置;28.尾部主推進(jìn)裝置。
該AUV的技術(shù)特點(diǎn)主要包括:
⑴深海水下目標(biāo)自主搜尋與探測(cè)系統(tǒng)的功能定位要求,基于模塊化設(shè)計(jì)技術(shù)、輕質(zhì)結(jié)構(gòu)設(shè)計(jì)技術(shù)、組合導(dǎo)航定位技術(shù)等。該AUV提出了深海水下目標(biāo)自主搜尋與探測(cè)系統(tǒng)總體技術(shù)方案,具有搜尋效率高、信息交互實(shí)時(shí)、重量輕、對(duì)母船依賴性小等特點(diǎn)。為深海遇險(xiǎn)目標(biāo)搜尋、探測(cè)與定位提供基礎(chǔ)平臺(tái)技術(shù),為救助打撈工作提供支撐。
⑵基于實(shí)時(shí)獲取的海底聲納圖像進(jìn)行自動(dòng)目標(biāo)檢測(cè),提高單次水下任務(wù)中目標(biāo)探測(cè)效率,同時(shí)基于AUV的慣導(dǎo)信息和定位信息,將掃描的聲納圖像合成為帶地理信息參考的海底圖像,為救助打撈工作提供數(shù)據(jù)支撐。
⑶聲信標(biāo)定向引導(dǎo)聲納技術(shù)充分利用聲信標(biāo)信號(hào),首次提出將小尺度深度直線基陣作為水下航行器作業(yè)引導(dǎo)聲納接收傳感器,實(shí)現(xiàn)深海聲信標(biāo)遠(yuǎn)距離測(cè)向,將大大延伸水下航行器探測(cè)搜尋聲信標(biāo)作業(yè)范圍,使水下航行器作業(yè)能快速搜尋并鎖定目標(biāo),對(duì)提高水下航行器作業(yè)效率意義重大。
該AUV的技術(shù)難點(diǎn)主要包括以下幾點(diǎn):
⑴大深度耐壓材料、結(jié)構(gòu)和設(shè)備。很多常規(guī)設(shè)備和材料無法承受6000m的大深度壓力,所以一些耐壓技術(shù)需要在借鑒“蛟龍?zhí)朒OV”的相關(guān)經(jīng)驗(yàn),進(jìn)行自主探索與突破。
⑵多聲納設(shè)備的搭載及兼容技術(shù)。AUV需要搭載深海地貌、地質(zhì)探測(cè)傳感器。各種任務(wù)傳感器的合理選擇、優(yōu)化配置及正確使用,決定了深海AUV的功能實(shí)現(xiàn)情況和整體性能優(yōu)劣,對(duì)AUV搭載的所有任務(wù)傳感器以及各種聲學(xué)設(shè)備進(jìn)行合理的架裝與集成應(yīng)用設(shè)計(jì),是AUV方案設(shè)計(jì)中的重要環(huán)節(jié)。同時(shí),由于多種傳感器同時(shí)工作,極易產(chǎn)生相互干擾的問題。在研制中,將采取以下措施:①在滿足總體功能要求下,對(duì)傳感器物理位置進(jìn)行合理布置,減小相互干擾;②對(duì)聲設(shè)備使用頻率盡量錯(cuò)開;③對(duì)聲設(shè)備采用聲同步裝置控制,減少相互干擾。
⑶深海導(dǎo)航定位精度:深度信息的融合和校準(zhǔn)。由于此AUV的深度變化范圍大,所以在導(dǎo)航算法中必須融入深度信息。把深度計(jì)測(cè)量得出的深度信息發(fā)送給慣性導(dǎo)航裝置進(jìn)行有效的融合才可以提高定位精度。另外,大深度航行時(shí)無法利用衛(wèi)星定位系統(tǒng)進(jìn)行校準(zhǔn),必須依賴水面的聲學(xué)定位系統(tǒng)來進(jìn)行校準(zhǔn)。聲學(xué)定位的精度比衛(wèi)星定位系統(tǒng)低,同時(shí)聲波還有一定延時(shí)需要補(bǔ)償。所以,深度信息的融合和對(duì)INS的校準(zhǔn)都是該AUV的技術(shù)難點(diǎn)。
⑷聲學(xué)圖像成像質(zhì)量和后處理算法。該AUV主要用于目標(biāo)從探測(cè)與搜救,所以對(duì)聲學(xué)圖像成像質(zhì)量及后處理算法有較高的要求。為了提高成像質(zhì)量必須對(duì)AUV的姿態(tài)和運(yùn)動(dòng)參數(shù)都進(jìn)行較精確的控制。同時(shí)還要引入對(duì)圖像的亮度、清晰度和對(duì)比度的增強(qiáng)算法來提高圖像質(zhì)量。為了進(jìn)一步提高目標(biāo)識(shí)別的可靠性,該AUV還搭載了光學(xué)探測(cè)設(shè)備。在光學(xué)圖像信息的幫助下,進(jìn)一步優(yōu)化聲學(xué)圖像的后處理算法,可以有效提高目標(biāo)探測(cè)和識(shí)別的成功率。所以,聲學(xué)圖像成像質(zhì)量和后處理算法也是該AUV的技術(shù)難點(diǎn)。
下面,再介紹一款最早可以實(shí)現(xiàn)水下精確導(dǎo)航的國(guó)產(chǎn)AUV。
該款A(yù)UV的指標(biāo)為:重量(空氣中)≤40kg、體積≤Ф240×17000mm;最大速度5kn;定位誤差≤15m(RMS);作業(yè)水深≥180m;使用海況≤3級(jí);抗流能力≤4kn。
下面,再介紹幾款ROV產(chǎn)品。國(guó)產(chǎn)的某款警用的小型ROV主要用于水下安防和反恐等。該系列ROV搭載的是加拿大出產(chǎn)的高性能聲納,可以對(duì)水下較小的可疑目標(biāo)進(jìn)行探測(cè)識(shí)別。目前,該系列ROV已成功地運(yùn)用在運(yùn)動(dòng)會(huì)和大壩的安防工作中。
某款國(guó)產(chǎn)的深海作業(yè)ROV主要用于實(shí)時(shí)水下聲納探測(cè)、水下光學(xué)觀測(cè)、打撈水下沉物、處理可疑目標(biāo)等。
它的主要技術(shù)指標(biāo)為:深度≥1200m;纜長(zhǎng)≥1500m;最大水平前進(jìn)速度≥2.5kn;最大作業(yè)距離≥600m;重量≤1300kg;前視聲納探測(cè)距離≥180m;光學(xué)觀測(cè)能力為2路水下電視(含水下照明燈4個(gè));作業(yè)能力為5功能和7功能機(jī)械手各一個(gè)。
該款水陸兩棲ROV的指標(biāo)為:重量≤120kg;續(xù)航力≥8h;最大工作深度≥100m。該型ROV機(jī)器人可水陸兩棲機(jī)動(dòng)、長(zhǎng)距離實(shí)時(shí)操控,能在黑暗、復(fù)雜的水下環(huán)境中完成環(huán)境觀測(cè)、搜救、水下通訊等任務(wù);可以建立水下被困現(xiàn)場(chǎng)與水面指揮系統(tǒng)的雙向通訊,為水面指揮系統(tǒng)提供救援決策依據(jù)。
以上就是國(guó)內(nèi)目前幾款具有代表性的AUV和ROV產(chǎn)品。下面,具體介紹幾個(gè)UUV領(lǐng)域的關(guān)鍵技術(shù)。這些關(guān)鍵技術(shù)往往也是制約UUV發(fā)展的瓶頸技術(shù),這些技術(shù)的突破往往意味著UUV技術(shù)的進(jìn)步。這些技術(shù)包括:
⑴總體技術(shù)。該技術(shù)是指UUV的艙段設(shè)計(jì),內(nèi)部設(shè)備與框架的布局配置,重心、浮心、中心的計(jì)算,穩(wěn)定性和操縱性的分析,電氣連接與穿艙件的布局,等等。同樣的一批設(shè)備通過優(yōu)化布局與配置可以使得UUV更加穩(wěn)定,操控性更好。所以,UUV設(shè)計(jì)前通過先進(jìn)的總體技術(shù)可以達(dá)到事半功倍的效果;
⑵能源與推進(jìn)。目前常用的能源為一次或二次鋰電池。燃料電池、核動(dòng)力等是未來的發(fā)展方向。最常用的推進(jìn)方式是推進(jìn)槳和舵機(jī)。近年來,十字舵、X形舵、泵噴和大側(cè)斜槳、低速單葉槳等技術(shù)被引入到UUV中;
⑶導(dǎo)航與水聲通信。AUV常見的導(dǎo)航方式為高精度光學(xué)慣性導(dǎo)航裝置(慣導(dǎo))與多普勒計(jì)程儀進(jìn)行組合導(dǎo)航。ROV常用MEMS慣導(dǎo)和水聲定位裝置進(jìn)行組合導(dǎo)航。基于半球諧振陀螺和旋轉(zhuǎn)調(diào)制技術(shù)的高精度慣導(dǎo)是未來的發(fā)展趨勢(shì)。水下通信最大的問題是丟包與延時(shí)。近年來的一些新的高速大寬帶水聲通信技術(shù)也被逐漸引入到UUV中;
⑷低噪聲與高隱蔽性。對(duì)于軍用UUV,靜寂性十分重要。低反射截面的外形、消聲瓦、吸聲材料、吸聲涂層、低噪聲推進(jìn)(例如:泵噴,等)、低噪聲慣導(dǎo)(例如:半球諧振慣導(dǎo)、光纖慣導(dǎo)等),這些技術(shù)都已經(jīng)在UUV的研制中得到一定的應(yīng)用;⑸外形設(shè)計(jì)與外殼加工。一個(gè)優(yōu)化后的外形意味著較低的阻力,從而可以節(jié)省能源,提高航程。外形主要分為迎流段、平行主體段和去流段。迎(去)流段艙體由迎(去)流殼體、內(nèi)部加強(qiáng)筋、各類孔座和艉端蓋等組成。迎(去)流段殼體的線形一般為樣條等各類復(fù)雜曲線,且其上開設(shè)了各種孔座,所以其流體力學(xué)分析很復(fù)雜,一般采用有限元軟件對(duì)其進(jìn)行仿真計(jì)算。殼體除了承受內(nèi)部各種設(shè)備載荷的重量外,還要承受外部強(qiáng)大水壓的均布載荷。所以其材料選擇和加工制作工藝也十分重要。傳統(tǒng)的外殼通常使用鋁合金,近年來鈦合金和碳釬維等也被應(yīng)用于UUV的外殼加工中;
⑹浮力調(diào)節(jié)與應(yīng)急拋載。常用的浮力調(diào)節(jié)有水艙、油馕、垂推、調(diào)整俯仰角等方式。常用的應(yīng)急拋載為重量經(jīng)過仔細(xì)核算的鉛塊或鐵塊,使用爆炸螺栓或電磁閥等方式實(shí)現(xiàn)拋棄;
⑺布放與回收。常用的布放與回收方式為吊車吊放及回收。近年來,滑道布放、小型AUV的手拋式布放、回收網(wǎng)回收、打撈網(wǎng)回收、自動(dòng)入塢等技術(shù)也得到了一定的發(fā)展。
三、未來發(fā)展展望
未來AUV的研制會(huì)引入越來越多的新技術(shù)。這些技術(shù)歸納起來總結(jié)如下:
⑴功能的多樣化:適時(shí)繪圖、三維或多維動(dòng)畫成像、海底氣象預(yù)測(cè)、水下偵聽與反偵聽、高精度的定位與導(dǎo)航。未來對(duì)海洋調(diào)查的需求會(huì)越來越多,以后的AUV希望可以快速和實(shí)時(shí)地進(jìn)行成像與繪圖,甚至可以進(jìn)行三維或多維動(dòng)畫成像。從而可以大大提升資源勘探和水下測(cè)繪等的效率。此外,以后的一些應(yīng)用將進(jìn)一步擴(kuò)展,在AUV搭載的計(jì)算機(jī)里存儲(chǔ)一些氣象數(shù)據(jù)處理軟件并搭載一些可以采集測(cè)量氣象數(shù)據(jù)的傳感器,那么AUV就可以執(zhí)行水下海洋氣象預(yù)測(cè)等新任務(wù)。未來的軍事領(lǐng)域必將對(duì)AUV提出水下偵聽與反偵聽等新要求。這就要求AUV有較強(qiáng)的聲學(xué)信號(hào)捕獲能力、較強(qiáng)的微小或偽裝目標(biāo)的識(shí)別能力和一定的作業(yè)能力等。所以必須引入一些新的聲學(xué)技術(shù)以及研制一些特種機(jī)械手等來滿足這些需求。在一些特殊任務(wù)中離不開高精度的定位與導(dǎo)航技術(shù)。如何在得不到有效的外部校準(zhǔn)的前提下提升定位精度是一個(gè)難點(diǎn)。通過引入一些先進(jìn)的導(dǎo)航算法有望解決這一難題。
⑵模塊化:針對(duì)不同的任務(wù)安裝不同的模塊。在MerMan-100的研制已經(jīng)采用了模塊化這一理念。這是未來AUV的一個(gè)發(fā)展趨勢(shì),美國(guó)的部分Bulefin產(chǎn)品已完全采用模塊化結(jié)構(gòu)。在以后的一些AUV的研制中會(huì)進(jìn)一步加強(qiáng)模塊化的設(shè)計(jì)理念。針對(duì)不同的任務(wù)在同一個(gè)AUV上安裝不同的模塊,不必去研制不同的AUV,這樣可以大大提高研制效率,降低成本。
⑶智能化:自主任務(wù)規(guī)劃、自主路徑優(yōu)化、自主目標(biāo)判別。人工智能自從誕生以來在各個(gè)領(lǐng)域發(fā)揮著重要的作用。通過改進(jìn)AUV的軟件算法和硬件設(shè)備,讓AUV具備自主任務(wù)規(guī)劃、路徑優(yōu)化和目標(biāo)判別等功能,則可以大大提高AUV的智能化程度。⑷組網(wǎng)觀測(cè):若干AUV組網(wǎng)、若干AUV與HOV/ROV組網(wǎng)。一個(gè)AUV的能力總是有限的,要想對(duì)一大片海域進(jìn)行高效地快速觀測(cè)調(diào)查,可以采用對(duì)大量水下觀測(cè)設(shè)備進(jìn)行組網(wǎng)的技術(shù)。對(duì)若干AUV進(jìn)行組網(wǎng),可以加強(qiáng)AUV的實(shí)時(shí)通信能力,使得眾多AUV可以在某個(gè)AUV或母船的指揮下統(tǒng)一行動(dòng),提高海洋調(diào)查的效率。另外,總有些復(fù)雜任務(wù)必須依賴人工操作。所以可以把若干AUV與某些HOV或ROV組合起來共同執(zhí)行一些任務(wù)。指揮人員通過HOV或ROV對(duì)若干AUV發(fā)送指令,當(dāng)某個(gè)AUV探測(cè)到可疑目標(biāo)需要人工作業(yè)則由HOV或ROV趕到特定區(qū)域去執(zhí)行任務(wù)。
⑸超遠(yuǎn)航程:三級(jí)式推進(jìn)、新型布放回收技術(shù)。深遠(yuǎn)海的調(diào)查離不開AUV的超遠(yuǎn)航程。以后的AUV計(jì)劃采用三級(jí)式推進(jìn)的方式來大大提高航程。首先由母船(水面艦船、潛艇或深海空間站等等)搭載重型AUV向目標(biāo)海域靠近,然后布放重型AUV。重型AUV接近目標(biāo)海域后,布放搭載的具有加強(qiáng)探測(cè)能力的小型AUV,由它達(dá)到目標(biāo)區(qū)域進(jìn)行研究。通信時(shí)也采用逐級(jí)上報(bào)/下發(fā)的模式,可以有效地解決通信距離過長(zhǎng)導(dǎo)致的信號(hào)過于微弱等問題。三級(jí)式推進(jìn)方式離不開新的布放回收技術(shù)。其中AUV的水下對(duì)接就是一個(gè)核心技術(shù)。引入常見的V形剪+彈簧機(jī)構(gòu)、桿+滑蓋、對(duì)接管+圓錐導(dǎo)向罩、錐形管狀框架、V字形定位裝置+平臺(tái)上的鎖定機(jī)構(gòu)、捕捉臂、機(jī)械臂、對(duì)接裙口、對(duì)接平臺(tái)、聲學(xué)導(dǎo)引、視覺對(duì)準(zhǔn)和導(dǎo)向纜等技術(shù)。同時(shí),借鑒航天對(duì)接里的異體同構(gòu)周邊和錐+桿這類對(duì)接機(jī)構(gòu),可以有效地解決重型AUV和小型AUV之間的對(duì)接難題。母船與重型AUV之間可采用發(fā)射管、回收網(wǎng)、吊車和機(jī)械手布放等回收方式。
⑹隱蔽性:降噪和抑制回波。在一些敏感海域,隱蔽性是一個(gè)不可回避的問題。如何利用一些先進(jìn)的技術(shù)來減小AUV的噪聲和回波是一個(gè)技術(shù)難點(diǎn)。目前,一些AUV的推進(jìn)已采用泵噴這類噪聲較小的推進(jìn)方式。采用一些新結(jié)構(gòu)、新材料和新涂層材料來有效地抑制回波也是未來的一個(gè)發(fā)展方向。
⑺適應(yīng)復(fù)雜水下地形:線控小型聲納技術(shù)。深遠(yuǎn)海的水下地形復(fù)雜多變,未知因素過多,不得不考慮抵抗惡劣環(huán)境和適應(yīng)復(fù)雜地形這類問題。為了能在復(fù)雜地形中有效避障,必須提升UUV的探測(cè)能力。為了可以探索海溝、狹縫等這類地形地貌,可以采用布放搭載的小型AUV或發(fā)射線控小型聲納這樣的技術(shù)。
⑻節(jié)能環(huán)保:新型推進(jìn)方式。節(jié)能環(huán)保永遠(yuǎn)是人們?cè)诳蒲兄兴非蟮哪繕?biāo)。水下滑翔機(jī)和波浪滑翔機(jī)這類觀測(cè)平臺(tái)也是一個(gè)發(fā)展方向。它們分別利用浮力調(diào)節(jié)機(jī)構(gòu)和水下翼板可以輕松地實(shí)現(xiàn)能耗小航程遠(yuǎn)的巡航。然而,它們的巡航幾乎只受水密度、洋流和波浪強(qiáng)弱等外界因素的控制,很難實(shí)現(xiàn)受控的自主航行。引入先進(jìn)的衛(wèi)星通信、太陽(yáng)能電池、基于模型預(yù)測(cè)的軌跡跟蹤、智能規(guī)劃等技術(shù),使得它們具有一定的受控的自主航行能力,勢(shì)必大大擴(kuò)展這類航行器的應(yīng)用范圍。
下面介紹ROV的發(fā)展趨勢(shì)。從目前國(guó)外ROV的研制技術(shù)來看已經(jīng)相當(dāng)成熟,并已實(shí)現(xiàn)了模塊化和系列化。隨著海洋經(jīng)濟(jì)的發(fā)展和軍事需求的增加,ROV將朝著以下幾個(gè)方向發(fā)展:
⑴向更專業(yè)化發(fā)展:這是市場(chǎng)和技術(shù)的共同需求。盡管ROV功能繁多,能執(zhí)行各種各樣的任務(wù)。然而,僅靠一臺(tái)ROV很難完成復(fù)雜的作業(yè)任務(wù)。所以,未來ROV將根據(jù)特定的任務(wù)需求搭載最合適的專用作業(yè)設(shè)備。在ROV載荷盡量輕的前提下,最大地提升ROV的作業(yè)效率,縮短作業(yè)時(shí)間。
⑵向操作更加簡(jiǎn)便、快捷發(fā)展:未來的ROV,人機(jī)交互會(huì)更好。在人機(jī)工程迅猛發(fā)展的當(dāng)代,ROV的操控同樣需要不斷地完善。需要從操作性能、控制精度、人機(jī)交互界面、響應(yīng)速度等多方面不斷地改進(jìn),使得操作更加簡(jiǎn)便、快捷。
⑶向ROV與AUV技術(shù)融合發(fā)展:正如前面的分析,ROV和AUV各有利弊。如果可以取長(zhǎng)補(bǔ)短將它們有效結(jié)合起來,勢(shì)必得到更高的作業(yè)效率,縮短作業(yè)時(shí)間。一種常用的組合方式是與母船近距離的復(fù)雜任務(wù)(例如:水下礦產(chǎn)或生物采樣等)由ROV執(zhí)行,而遠(yuǎn)距離的搜索、探測(cè)等任務(wù)由AUV執(zhí)行。還可以選擇ROV與AUV協(xié)同作業(yè),ROV作為領(lǐng)航者和團(tuán)隊(duì)的指揮帶領(lǐng)團(tuán)隊(duì)進(jìn)行高效的作業(yè)。ROV和AUV具體組合方式可以根據(jù)任務(wù)需求進(jìn)行優(yōu)化與調(diào)整。
四、結(jié)束語(yǔ)
綜上所述,盡管我國(guó)已成功研制出多型UUV,但目前尚未形成系列化產(chǎn)品,UUV在國(guó)內(nèi)的應(yīng)用依然有很大的發(fā)展空間。我國(guó)擁有300萬平方公里的海洋國(guó)土,海岸線長(zhǎng)1.8萬平方公里,內(nèi)陸湖泊、重要水庫(kù)大壩不計(jì)其數(shù)。若能充分利用各種成熟技術(shù),大力開發(fā)UUV,將其大量用于海洋調(diào)查開發(fā)、重要水道安全巡邏或排障、重要水庫(kù)大壩監(jiān)控巡查或檢修等領(lǐng)域,不但可以大大降低人員水下作業(yè)風(fēng)險(xiǎn),而且能夠取得重大經(jīng)濟(jì)效益。UUV的研制將趕上這個(gè)時(shí)代的浪潮,瞄準(zhǔn)新方向不斷地創(chuàng)新、突破,勢(shì)必在我國(guó)的海洋研究、海洋工程技術(shù)和海洋裝備發(fā)揮重要的作用。
文章來源:《計(jì)算機(jī)測(cè)量與控制》(2023年第2期)
審核編輯:黃飛
-
AUV
+關(guān)注
關(guān)注
0文章
11瀏覽量
10882 -
水下航行器
+關(guān)注
關(guān)注
0文章
15瀏覽量
8645 -
uuv
+關(guān)注
關(guān)注
1文章
5瀏覽量
3939
原文標(biāo)題:水下無人航行器的研究現(xiàn)狀與展望
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
水下航行器模擬平臺(tái)系統(tǒng)的總體架構(gòu)是什么?
運(yùn)載平臺(tái)怎么實(shí)驗(yàn)水下航行器的功能?
航行器半實(shí)物仿真具有哪些特點(diǎn)?由那幾部分組成?
圖像分割方法的研究現(xiàn)狀與展望
基于Vega Prime實(shí)時(shí)視景仿真水下航行器應(yīng)用
使用無人駕駛船部署自主水下航行器的新系統(tǒng)
水下航行器控制半實(shí)物仿真系統(tǒng)的組成原理、特點(diǎn)及應(yīng)用研究

水下航行器輔助的水下地理機(jī)會(huì)路由協(xié)議

水下航行器水下高度、航向和姿態(tài)測(cè)量方案的介紹
DARPA引領(lǐng)無人水下航行器(UUV)電源技術(shù)的進(jìn)步
水下航行器電機(jī)的SiC MOSFET逆變器設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論