 智駕數據采集平臺搭建之多傳感器聯合標定
智駕數據采集平臺搭建之多傳感器聯合標定
作者 |不愛吃香菜的攻城獅
小編 | 不吃豬頭肉
簡介
在自動駕駛發展如火如荼的今天,L4和L5級 的自動駕駛功能依舊處于算法開發和驗證的階段,就無可避免的需要極其龐大的路試數據用以支撐算法的開發和訓練,為此,北匯信息為客戶提供整套的數采平臺解決方案。值得一提的是,在數采平臺搭建后,到數據的消費端之前,必須要完成數采平臺中傳感器的標定,才能夠使得數據用于感知算法的開發、數據回灌等,所以本文給大家介紹的也是在數采平臺搭建之后的傳感器標定的相關內容。
由于多傳感器的融合能夠顯著的提高智駕系統的容錯性以及冗余度,保證了規控決策的快速性和準確性,已成為自動駕駛的主流趨勢。如今的自動駕駛車輛上的傳感器都包括如下:
激光雷達:測距精度、范圍及對溫度和光照的適應性都很強,但是相對較昂貴;
攝像頭:相機對環境的細節信息的提取能力強,但是光照適應性弱;
毫米波雷達:探測角度大,抗干擾也強,但是分辨率和精度不足;
超聲波雷達:成本低廉,但是精度較差;
GPS+IMU: GPS更新頻率低,但每次更新不存在誤差累積,IMU更新頻率高,但更新過程存在誤差累積,所以聯合互補使用。
針對這幾種傳感器,通常都需要完成它們之間的聯合標定,如lidar2cam、lidar2imu、radar2lidar、lidar2lidar、radar2cam等等,才能夠滿足算法開發的使用要求。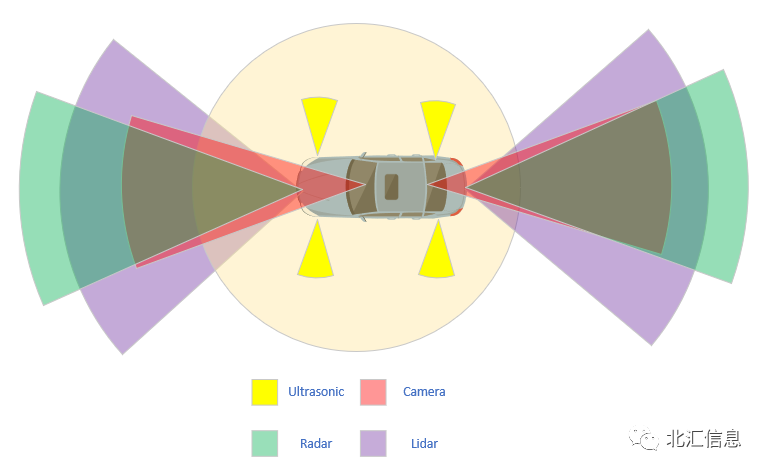

傳感器標定的原因
傳感器標定是自動駕駛感知系統中的重要環節,是后續傳感器融合的必要步驟和先決條件,其目的是將兩個或者多個傳感器變換到統一的時空坐標系,使得傳感器融合具有意義,是感知決策的關鍵前提。
原因一:由于傳感器的種類以及數量眾多以及位置不同,每一個傳感器都有自身的坐標系。比如,毫米波雷達通常會以天線面板中心為坐標原點,垂直坐標原點為X軸建立空間直角坐標系,而攝像頭同時也存在一個不同于雷達的坐標系,如下圖。
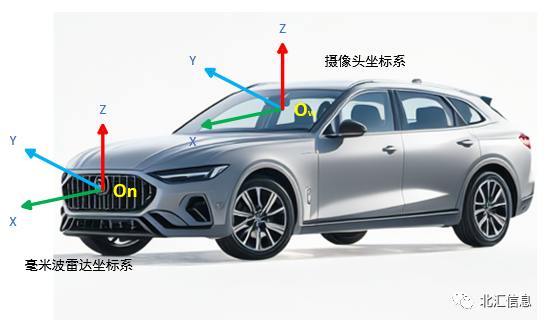
通常情況下,我們是在以車輛為坐標原點的空間直角坐標系下開發諸如ACC、AEB等智駕功能的,此時就需要將傳感器的目標映射到車輛坐標系下,才能夠基于數據進行感知融合規控算法的開發;
原因二:由于安裝誤差的存在,以及車輛在使用過程中的振動等,可能會導致傳感器的預定安裝角度和位置發生偏移,此時就需要通過標定來確定傳感器的實際位姿和坐標轉換關系,例如改制車輛在使用一段時間后可能需要重新進行標定以及汽車的售后標定等。
 傳感器的標定過程
傳感器的標定過程
標定工作通常分為外參標定和內參標定,內參是決定傳感器內部的映射關系,如攝像頭的內參包括焦距、畸變系數等,而外參則是傳感器和外部坐標系的轉換關系,即位姿參數。1.傳感器的內參標定
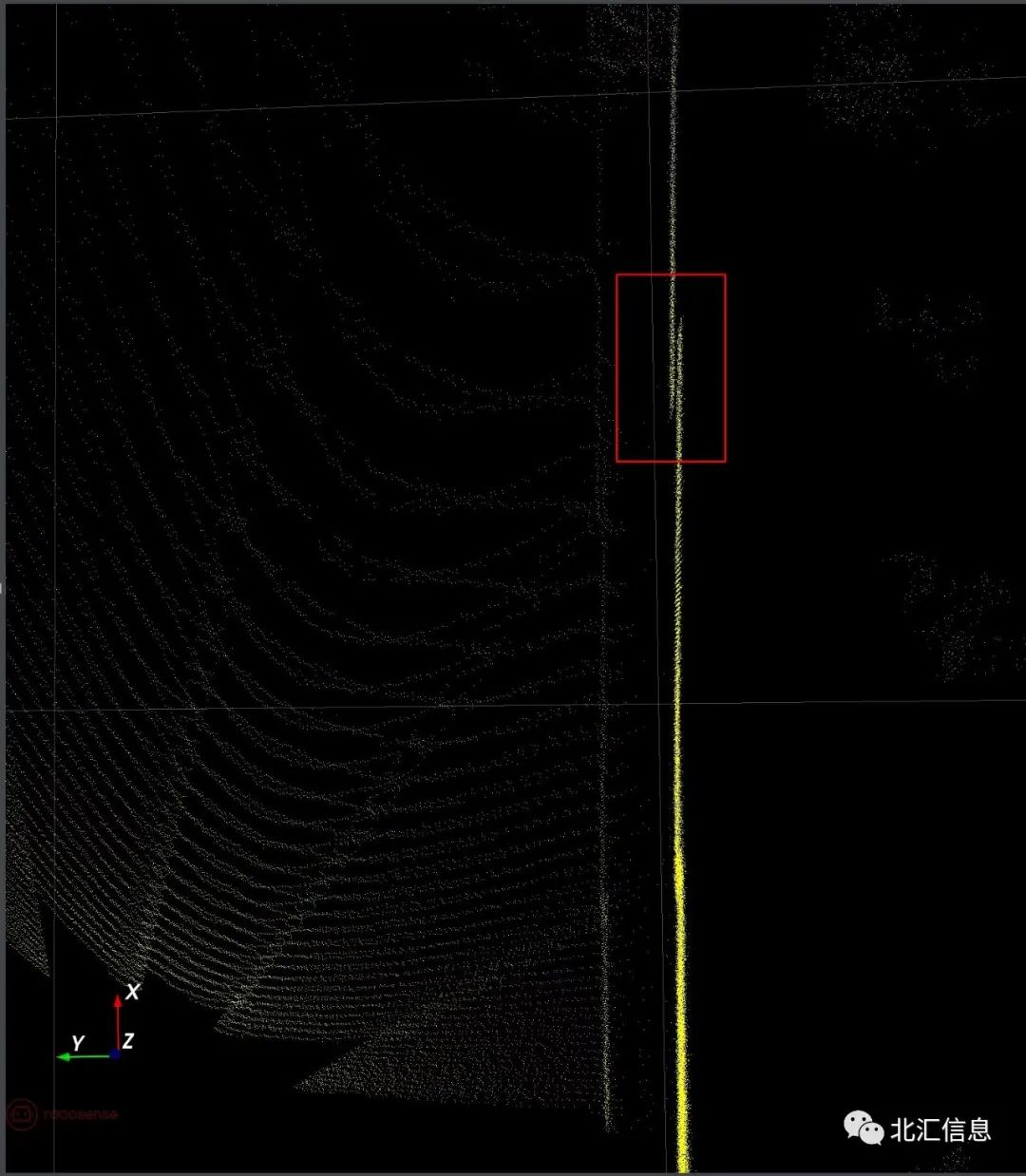
一般來說,高階智駕的傳感器的內參通常是由各個供應商廠家標定完成后給到用戶的,如攝像頭的焦距和畸變系數等;但是有時也會遇到出廠后需要標定的場景,也可以自己完成內參的標定。比如激光雷達可以通過供應商提供的軟件完成內參的重新標定(下圖為固態激光雷達通道拼接斷層示例)。
 另外,通過標定板也可以完成攝像頭的內參標定,標定的方法如下圖:
另外,通過標定板也可以完成攝像頭的內參標定,標定的方法如下圖: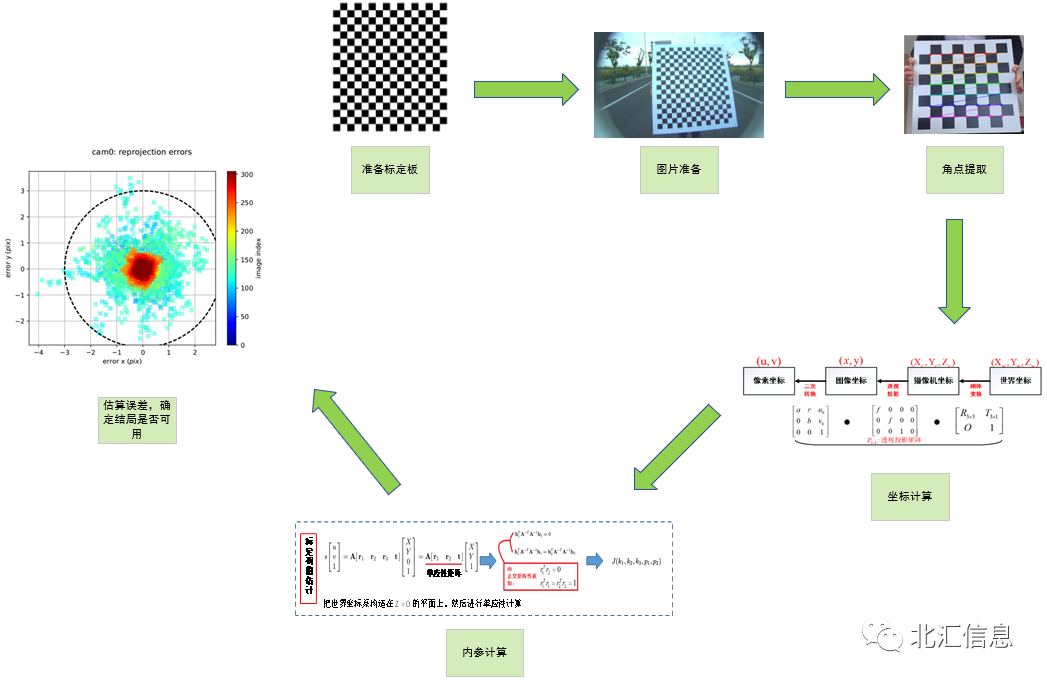
第一步,準備一個標定板,可以是圓點標定板,也可以是棋盤格標定板;
第二步,在不同的位置和角度下拍攝多張包含標定盤的圖片,需要注意的是,標定的圖片要做到盡可能覆蓋相機的視場,并且確保在不同的位置和角度下都能看到完整的標定板。
第三步,提取標定板的特征點,并且使用圖像處理算法或者視覺庫從圖片中提取標定板的特征點。
第四步,將不同的圖像中的特征點進行匹配,確定其在三維標定系中的對應關系。
第五步,利用已知的標定板的三維世界坐標和其在圖像中的對應二維像素坐標,通過相機模型的數學計算,估計相機的內參參數,包括焦距、畸變等。
第六步,通過最小化標定板特征點的重投影誤差,來優化估計得到的內參參數。
2.傳感器的外參標定值得一提的是,標定方法通常還分為targetless和target兩種,第一種一般可以在任意環境中進行標定,約束條件少,不需要用專門的target;第二種則需要專門的控制場,在特定的標定環境下進行,比如典型的棋盤格平面板標定間。本文基于targetless以及離線標定的方式來對外參標定進行舉例。lidar2cam的標定: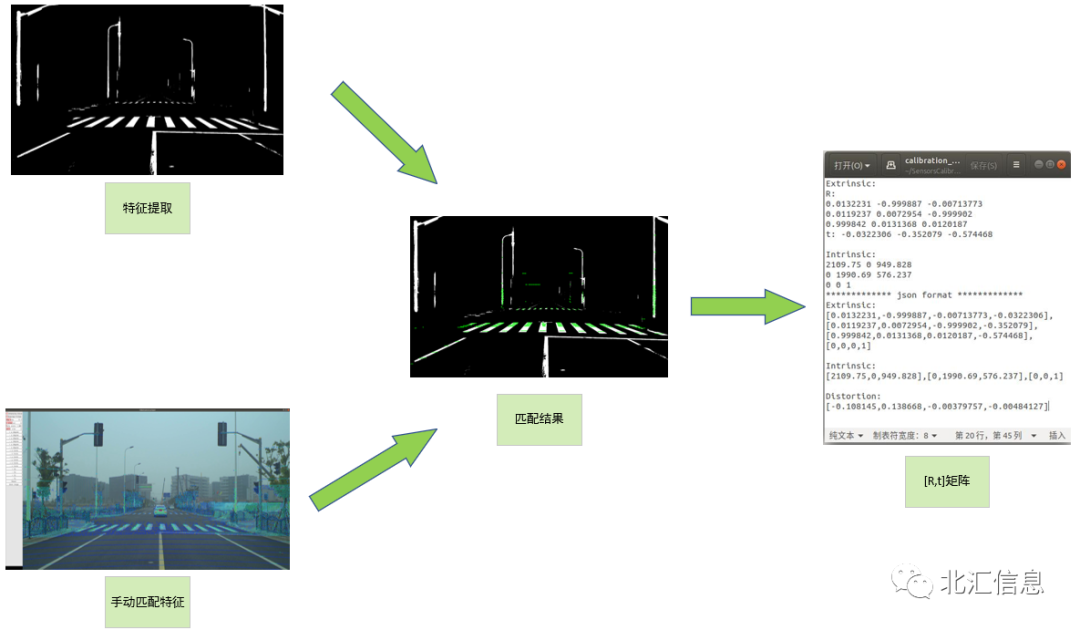
第一步,在任意的環境中錄制lidar數據和拍攝相機圖片,通常最好選擇有較明顯的垂直相交特征(如垂直于地面的電線桿)以及平整地面的環境會使得標定過程更加簡單和結果更加準確。
第二步,導入標定源數據后,對lidar特征點云進行提取。
第三步,通過可視化界面,手動調整lidar點云的位姿,使得其和相機的特征相匹配,自動標定則是自動提取特征點云之后進行匹配,沒有手動過程。
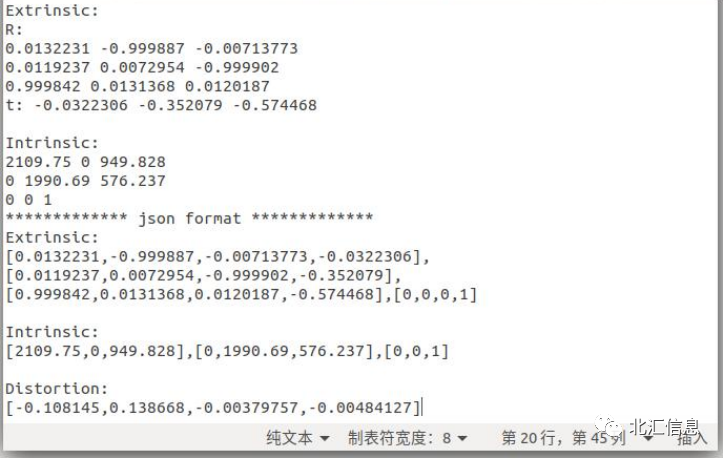
第四步,點云匹配之后即可得到坐標轉換關系,也即位姿矩陣[R,t],常見的是.yaml或者.txt的文件格式,打開的內容如下圖所示。
lidar2lidar的外參標定:
也是先錄制離線數據包,環境里面最好包含有垂直相交點云特征的物體,對點云數據進行提取,通過手動標定板調整點云姿態,匹配之后輸出位姿矩陣[R,t]。如下圖所示,左邊是沒有標定之前的點云, 右邊是標定完成之后的點云: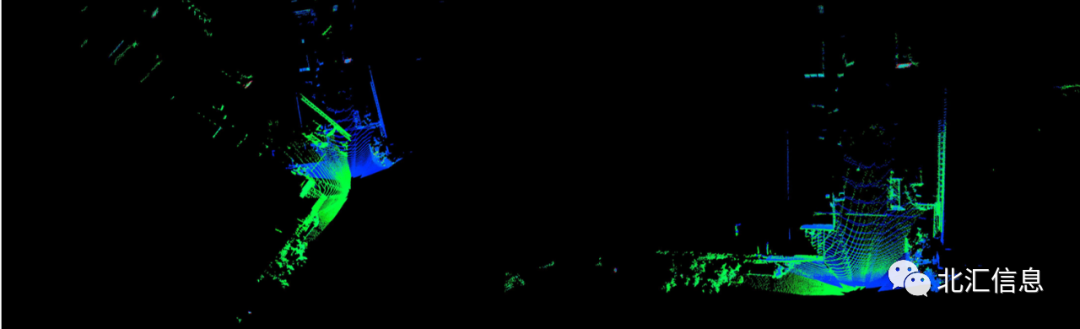 以下是三個激光雷達(前雷達、前左雷達、前右雷達)使用位姿矩陣將坐標轉換后效果視頻:
以下是三個激光雷達(前雷達、前左雷達、前右雷達)使用位姿矩陣將坐標轉換后效果視頻:
除了lidar2cam和lidar2lidar之外, 其他的外參標定如lidar2radar、radar2cam等標定原理基本上是相似的,所以標定的步驟基本也是類似的,這里就不一一敘述了。有了眾多傳感器的坐標轉換關系,就可以完成坐標系的統一,比如統一到車輛后軸中心,從而進行智駕功能的開發了。 傳感器精度驗證標定完成之后如何進行精度的驗證呢?有如下方法可以使用:
傳感器精度驗證標定完成之后如何進行精度的驗證呢?有如下方法可以使用:
直接測量:通過傳感器之間的位移,通過測量值來判斷標定的位移量和測量之間差別是否過大;
下游評估:通常下游在使用標定參數時能夠通過其自己的算法判斷標定是否準確,如通過測距是否準確來判斷相機內外參是否標定準確;通過融合確定不同傳感器感知融合的誤差是否過大來判斷外參標定是否準確;通過規控判斷車輛行駛是否正常,標定參數不對導致的規控異常。
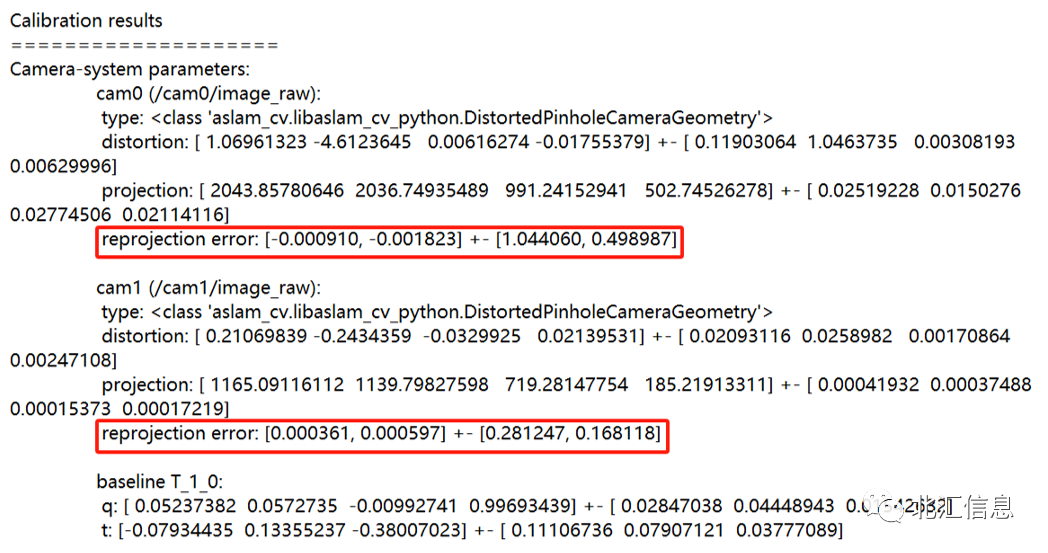
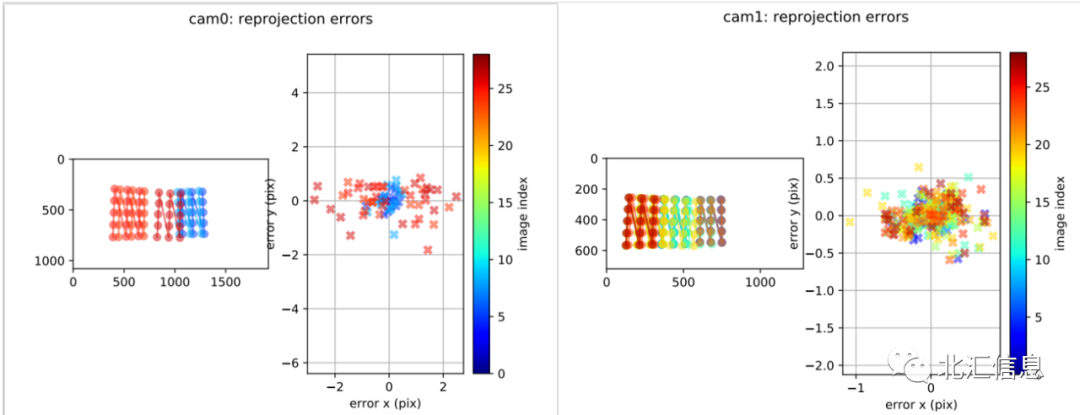
設計標準:有些主機廠會通過設計標定的預期效果來設計定量評估標準。比如相機畸變標定之后的 “直線特征”。又或者舉個例子,可以規定在所有的攝像頭內參標定重投影誤差(pixel)<=1從而來定量進行判斷。比如下面兩張圖張圖展示了兩個攝像頭的標定結果報告的部分內容,如重投影誤差以及誤差的標準差變化范圍(如[-0.000910, -0.001823],表示在水平和垂直方向上的誤差,而后面的標準差部分 [1.044060, 0.498987] 表示這個誤差的不確定性,即誤差的變化范圍。)。
可視化判斷:許多時候都是通過可視化直接查看標定精度是否達到預期。如雷達和相機的標定可以查看圖像和點云是否對齊來進行判斷;雷達和雷達的標定可以通過看雷達和雷達之間的配準來進行判斷;相機和相機的標定可以通過看環視拼接效果進行判斷。
 總結本文給大家介紹了ADAS傳感器標定的原因,描述了標定的類型以及舉例介紹了相關的標定原理或者說標定過程,最后在簡要介紹了標定精度的驗證。如果還想了解更多智駕傳感器標定的相關內容,或者對北匯信息的智能駕駛數據閉環解決方案的其他內容感興趣的話,歡迎聯系我們,期待您的到來。
總結本文給大家介紹了ADAS傳感器標定的原因,描述了標定的類型以及舉例介紹了相關的標定原理或者說標定過程,最后在簡要介紹了標定精度的驗證。如果還想了解更多智駕傳感器標定的相關內容,或者對北匯信息的智能駕駛數據閉環解決方案的其他內容感興趣的話,歡迎聯系我們,期待您的到來。
-
傳感器
+關注
關注
2551文章
51171瀏覽量
754242 -
數據采集
+關注
關注
39文章
6131瀏覽量
113723 -
雷達
+關注
關注
50文章
2940瀏覽量
117611 -
自動駕駛
+關注
關注
784文章
13838瀏覽量
166546
發布評論請先 登錄
相關推薦
工業傳感器如何實現數據采集?
PLC數據采集IoT平臺是什么
傳感器靜態標定的主要步驟是什么

康謀技術 | 自動駕駛傳感器標定技術:從單一到聯合標定

康謀技術 | 自動駕駛傳感器標定技術:從單一到聯合標定

工控數據采集物聯網平臺是什么
水利數據采集遠程監控平臺是什么
lora無線數據采集平臺是什么
plc物聯網數據采集平臺是什么






 工商網監
工商網監
評論