") 如何在循環(huán)中斷中創(chuàng)建工藝對象PID控制器?
如何在循環(huán)中斷中創(chuàng)建工藝對象PID控制器?
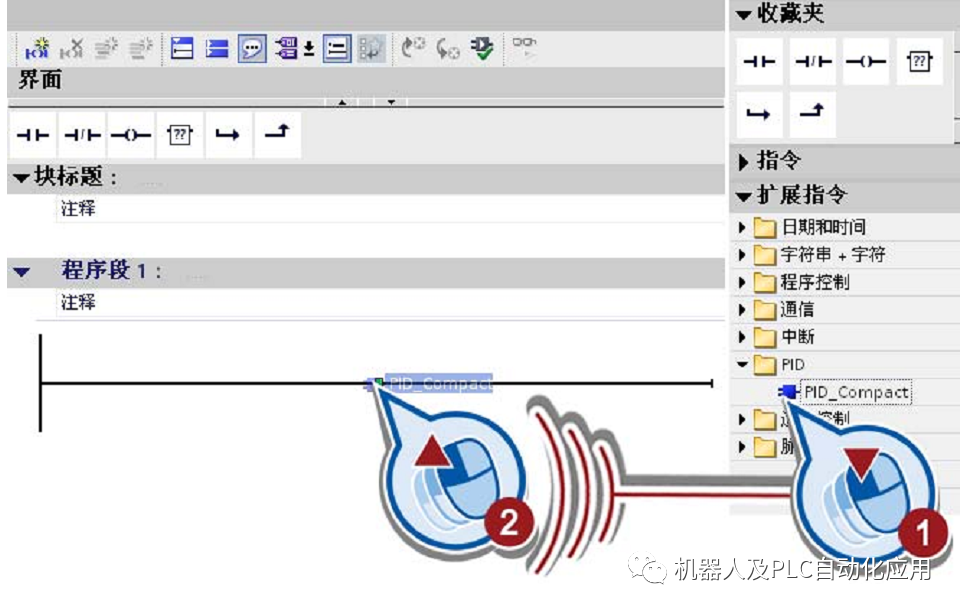
以下步驟將介紹如何在循環(huán)中斷 OB“PID [OB200]”中調(diào)用工藝對象“PID_Compact” 。
步驟
要在循環(huán)中斷 OB“PID [OB200]”中調(diào)用工藝對象“PID_Compact” ,請按以下步驟操作:
在組織塊“PID [OB200]”的第一個程序段中,創(chuàng)建工藝對象“PID_Compact” 。
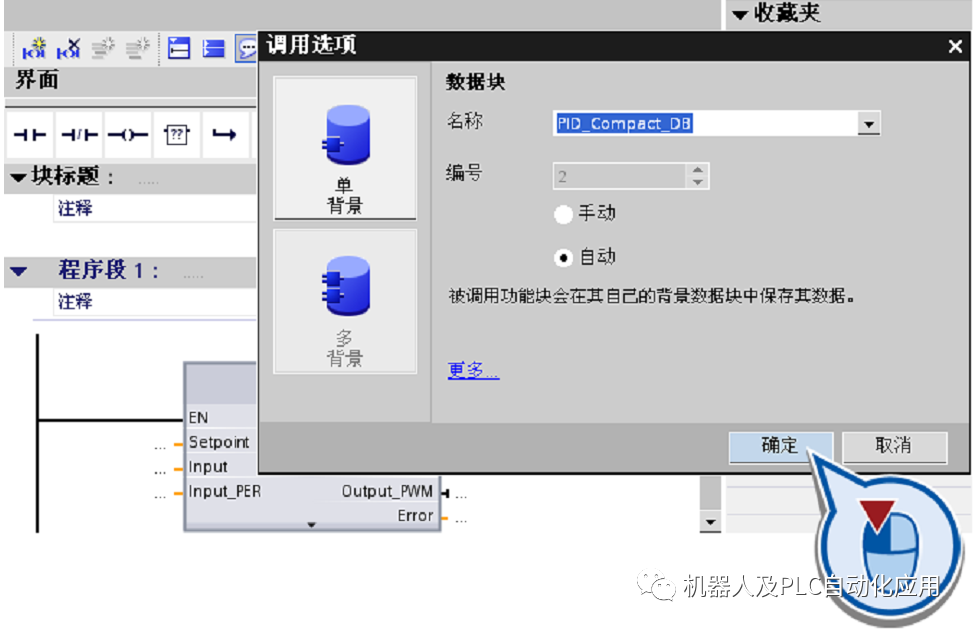
2. 確定為工藝對象“PID_Compact” 創(chuàng)建數(shù)據(jù)塊。
結(jié)果
已通過編程設(shè)定了在循環(huán)中斷 OB“PID [OB200]”中調(diào)用工藝對象“PID_Compact” 并且已創(chuàng)建數(shù)據(jù)塊“PID_Compact_DB” 。
在下一部分中,將介紹如何在程序中加載仿真塊以便仿真 PID 控制器的輸入和輸出值。
PID_Compact V2
在以下示例中,通過指令“PID_Compact”的工藝對象來控制溫度值。基于一個用于仿真三階延時元件(PT3 元件)的塊對溫度值進行仿真。工藝對象的 PID 參數(shù)可通過預(yù)調(diào)節(jié)自動設(shè)置。
數(shù)據(jù)存儲
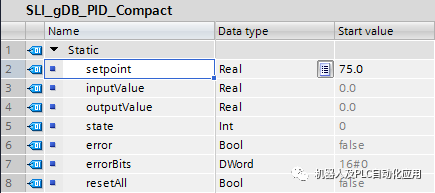
在全局數(shù)據(jù)塊中創(chuàng)建 7 個變量,以便存儲互連數(shù)據(jù)。
參數(shù)的互連
在循環(huán)中斷 OB 中調(diào)用以下互連。
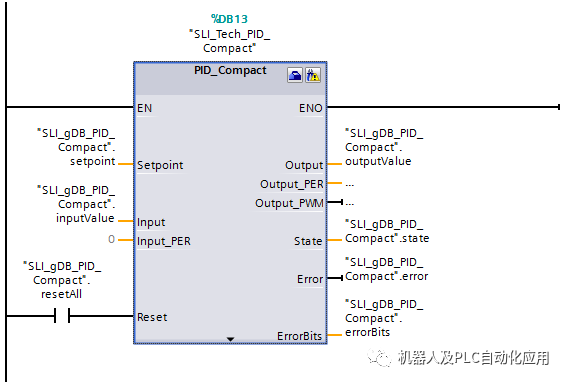
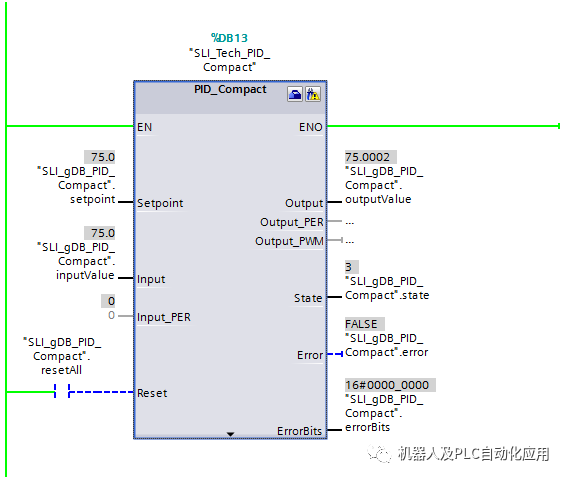
網(wǎng)絡(luò) 1:按照如下所示,對指令“PID_Compact”的參數(shù)進行互連。
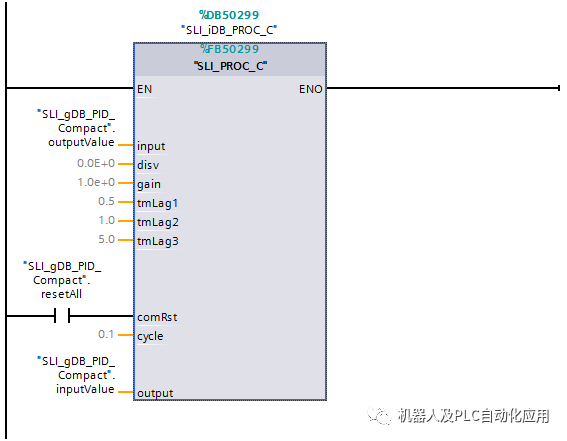
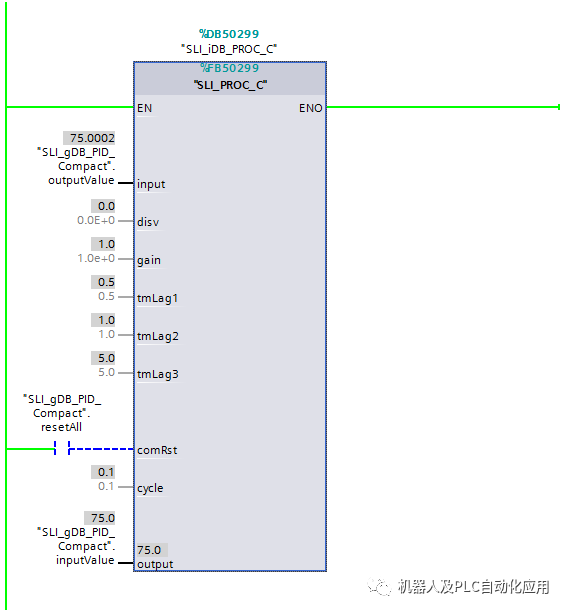
程序段 2:按照如下所示,對用于仿真溫度值“SLI_PROC_C”的塊參數(shù)進行互連。
工藝對象
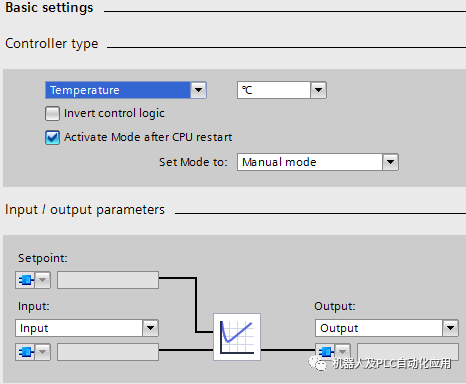
通過指令“PID_Compact”的屬性或使用路徑“工藝對象 > 組態(tài)”(Technology object > Configuration) 對工藝對象進行組態(tài)。對于本示例,控制器類型和輸入/輸出參數(shù)至關(guān)重要。借助控制器類型,您可以預(yù)先選擇要控制值的單位。在本示例中,將單位為“°C”的“溫度”(Temperature) 用作控制器類型。“PID_Compact”的參數(shù)已經(jīng)與全局變量互連。因此,有關(guān)參數(shù) Input 和 Output 的使用信息十分充分。
啟動控制的步驟
下載到 CPU 后,PID_Compact 處于手動模式,手動值為 0.0。要啟動控制,請按照以下步驟進行操作:
|
打開工藝對象“SLI_Tech_PID_Compact”的“調(diào)試”(Commissioning) 對話框。 單擊“測量”(Measurement) 區(qū)域中的“啟動”(Start) 按鈕。  測量過程將啟動并且可激活 PID_Compact。 選擇預(yù)調(diào)節(jié)。 單擊“調(diào)節(jié)模式”(Tuning mode) 區(qū)域中的“啟動”(Start) 按鈕。 執(zhí)行了預(yù)調(diào)節(jié)。PID 參數(shù)根據(jù)過程自動調(diào)整。完成預(yù)調(diào)節(jié)后,PID_Compact 切換到自動模式。
|
停止控制的步驟
要停止并退出 PID_Compact 和程序,請按照以下步驟進行操作:
單擊工藝對象“SLI_Tech_PID_Compact”中“控制器的在線狀態(tài)”(Online status of controller) 區(qū)域中的“Stop PID_Compact”按鈕。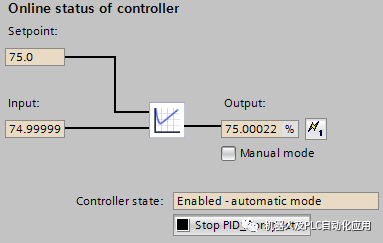 指令“PID_Compact”將退出控制并將值“0.0”作為調(diào)節(jié)變量輸出。 單擊“測量”(Measurement) 區(qū)域中的“停止”(Stop) 按鈕。 要將過程值立即設(shè)為“0.0”,請按下列步驟操作: 在“SLI_OB_PID_Compact”塊中,將“resetAll”變量設(shè)為值“TRUE”,然后再設(shè)為值“FALSE”。 |
“PID_Compact”指令
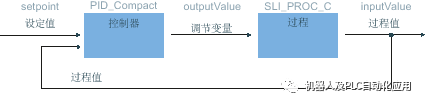
在參數(shù) Setpoint(“setpoint”)處指定要控制的溫度的設(shè)定值。通過工藝對象啟動指令“PID_Compact”時啟動控制。指令“PID_Compact”將在輸出參數(shù) Output(“outputValue”)處輸出一個調(diào)節(jié)變量。通過輸入?yún)?shù) Input(“inputValue”)將溫度的過程值傳送給指令“PID_Compact”。
指令“PID_Compact”可根據(jù)設(shè)定值(“setpoint”)和過程值(“inputValue”)之間的歷史偏差調(diào)整操作變量(“outputValue”)。重復(fù)進行該過程,通過操作變量(“outputValue”)使過程值(“inputValue”)接近設(shè)定值(“setpoint”)。
輸出參數(shù) State(“state”)處顯示了指令“PID_Compact”的當(dāng)前工作模式。在完成預(yù)調(diào)節(jié)后(“state”的值為“1”),PID_Compact 將切換至自動模式(值為“3”)。
當(dāng)前的輸出參數(shù) Error(“error”)顯示無錯誤待決。發(fā)生錯誤時,輸出參數(shù) ErrorBits(“errorBits”)提供關(guān)于錯誤類型的信息。如果發(fā)生錯誤,可在工藝對象中的優(yōu)化狀態(tài)區(qū)域通過“ErrorAck”按鈕確認。
“SLI_PROC_C”塊
“SLI_PROC_C”塊用于對不斷上升的設(shè)備溫度的過程值(“inputValue”)進行仿真。“SLI_PROC_C”塊包含控制器的操作變量(“outputValue”),可對過程的溫度特性進行仿真。該溫度作為過程值(“inputValue”)反饋到控制器中。
“resetAll”變量(comRst 參數(shù))值的變化 () 會產(chǎn)生以下影響:
| 參數(shù) comRst(“resetAll”) | 指令“PID_Compact”正在運行 | 指令“PID_Compact”已停止運行 |
|---|---|---|
| comRst(“resetAll”)仍設(shè)置為值“FALSE” | “SLI_PROC_C”塊基于操作變量(“outputValue”)輸出一個新的過程值(“inputValue”)。 | “SLI_PROC_C”塊不會接收大于“0.0”的操作變量,但仍會輸出一個新的過程值 >“0.0”。 |
| comRst(“resetAll”):從“FALSE”變?yōu)橹怠癟RUE” | 操作變量(“outputValue”)和輸出過程值(“inputValue”)均復(fù)位為“0.0”。 | “SLI_PROC_C”塊的過程值(“inputValue”)/溫度復(fù)位為“0.0”。 |
| comRst(“resetAll”):從“TRUE”變?yōu)橹怠癋ALSE” | 再次啟動溫度控制。 | 輸出過程值/溫度(“inputValue”)保持“0.0”。 |
審核編輯:劉清
-
仿真器
+關(guān)注
關(guān)注
14文章
1018瀏覽量
83744 -
PID控制器
+關(guān)注
關(guān)注
2文章
173瀏覽量
18583
原文標題:西門子博途:創(chuàng)建工藝對象 PID 控制器
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
如何在for循環(huán)中為每個測試添加不同的操作?
PID控制器的控制規(guī)律

PID控制器與重復(fù)控制器的單相逆變器復(fù)合控制的設(shè)計

PID控制器選型基本原則
使用過程仿真函數(shù)模擬PID控制的過程
PID控制器概述與制作實例
PID控制器中P、I、D的含義
PID調(diào)節(jié)中的d指的是什么控制器
西門子博途中循環(huán)中斷功能的編程示例






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論